橋式吊車智能降抖振滑模控制
2020-12-23 04:33:21劉漢東劉惠康柴琳
現代電子技術 2020年23期
劉漢東 劉惠康 柴琳


摘 ?要: 針對橋式吊車的快速定位及抑制擺動問題,以滑模控制為基礎,在Matlab仿真中采用粒子群算法對滑模控制器中的重要參數進行優化。同時,由于在傳統的滑模控制當中,狀態軌跡到達滑模面后,幾乎無法嚴格按照滑模面向著平衡點滑動,而是在其兩側來回穿越,由此產生顫動即抖振,因此引入模糊控制來降低滑模控制中存在的抖振。結果表明:系統在快速定位及抑制擺動的同時也降低了控制量的抖振幅度,可見,經過粒子群算法及模糊規則優化后的橋式吊車滑模控制器具有良好的控制效果。
關鍵詞: 滑模控制; 抖振降低; 橋式吊車; 參數優化; 模糊控制; Matlab仿真
中圖分類號: TN876?34; TP18 ? ? ? ? ? ? ? ? ? ?文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)23?0085?05
Abstract: In order to realize fast positioning and swing suppression of bridge crane, particle swarm optimization (PSO) algorithm is used in Matlab simulation to optimize the important parameters of sliding mode controller according to the sliding mode control. Since the state trajectory of the traditional sliding mode control can hardly slide to the equilibrium point through the sliding mode surface when it reaches the sliding mode surface, but crosses back and forth on the both sides, which produces chattering, namely buffeting, the fuzzy control is introduced to reduce the existing buffeting in the sliding mode control. The results show that the buffeting amplitude of the control quantity is reduced while the system locates rapidly and suppresses swing. It can be seen that the bridge crane′s sliding mode controller optimized by PSO and fuzzy rules has a good control effect.
Keywords: sliding mode control; buffeting reduction; bridge crane; parameter optimization; fuzzy control; Matlab simulation
0 ?引 ?言
橋式行車作為一種重物搬動裝置,在很多工業場合下具備極大作用,但是由于其屬于欠驅動系統,在其臺車運動的過程中其吊繩必然會發生擺蕩,容易造成危險。對于吊車如何以較快速度到達指定位置的同時又能夠消除吊重擺繩的擺動成為眾多相關專家學者研究的問題[1?2]。
對此,相關領域的學者已經進行了一些研究并有了如下成果:文獻[3]結合軌跡規劃理論,提出一種高效的在線軌跡跟蹤控制策略,取得了良好的控制效果,但其對模型做了較大的近似,不夠精確;文獻[4]設計的控制器盡管控制性能良好,但是忽略了吊車所受的摩擦力;文獻[5]通過向PID控制器中添加專家經驗,得到了令人滿意的控制效果,但由于其使用了簡化模型,因此與實際差距較大。而滑模控制作為一種有效的非線性控制方法[6],對欠驅動系統具有優良的控制性能,不過由于其控制特性,容易造成控制量的抖振,故在此使用PSO算法對控制器參數進行優化并引入模糊規則降低抖振,在實現吊車快速定位及消擺的同時降低抖振。
1 ?吊車系統動力學模型
1.1 ?吊車模型的建立
橋式行車是一種強耦合、單輸入多輸出的復雜系統。為了方便建模,在此做一些必要的假設:
1) 吊車運行時,由于工況要求,臺車和橋架不可同時運動,故在此忽略橋架機構的運動。
2) 忽略風阻。
3) 臺車及吊運重物的運動均處在同一平面。
4) 吊繩的質量忽略不計。
假設臺車與行進軌道間的摩擦力和臺車運行速度關系為正比例關系,摩擦因數設為[μ]。
二維橋式行車的示意圖如圖1所示。在圖1中,設臺車和吊重質量分別為[M]和[m],擺長為[l],吊重擺角為[θ],臺車所受驅動力和摩擦阻力分別為[F]和[f],鋼繩受到的張力為[fl]。
1.2 ?模型的簡化
在實際生產操作中,由于工況要求,在起重機小車移動時要保證提升電機處于制動狀態,使吊車吊運系統在吊運時的繩長保持不變[7],也就是令[l≈l≈0],無需對[fl]作控制,只需考慮臺車位置[x]和吊重擺角[θ]的狀態,[F]是唯一控制量。故由式(5)可得吊重繩長不變的吊車系統的位置[x]和擺角[θ]的表達式為:
2.2 ?粒子群算法原理
粒子群算法是模擬鳥群隨機尋找食物這一流程的一種算法[8]。設指定的區域里僅有一份食物,而所有的小鳥都不知道食物所在地,故研究人員認為每只鳥之間有著信息的互通。經過對自身適應度值的預估,這些個體能夠知道現在的位置與食物的距離,故尋找現在離食物距離最短的鳥的四周可以最迅速地獲取食物,以此達到群體最優。
2.3 ?優化過程設計
由于缺乏有效的整定方法,滑模控制器的參數往往是根據經驗賦值并進行驗證后得出,這樣的設置有較大的主觀性,不夠精確客觀,造成控制效果有限。故在此引入粒子群算法進行最優參數的搜索和確定,既能讓吊車比較快速地定位,又可最終消除擺角。
粒子群算法需要建立一個性能指標函數作為其確定誤差是否最小的標準。常用的指標如下:ISE,IAE,ITAE,ISTE。本文選用的指標函數為ITAE,其定義如下:
由此得到將臺車位移和擺角誤差合二為一的性能指標函數。
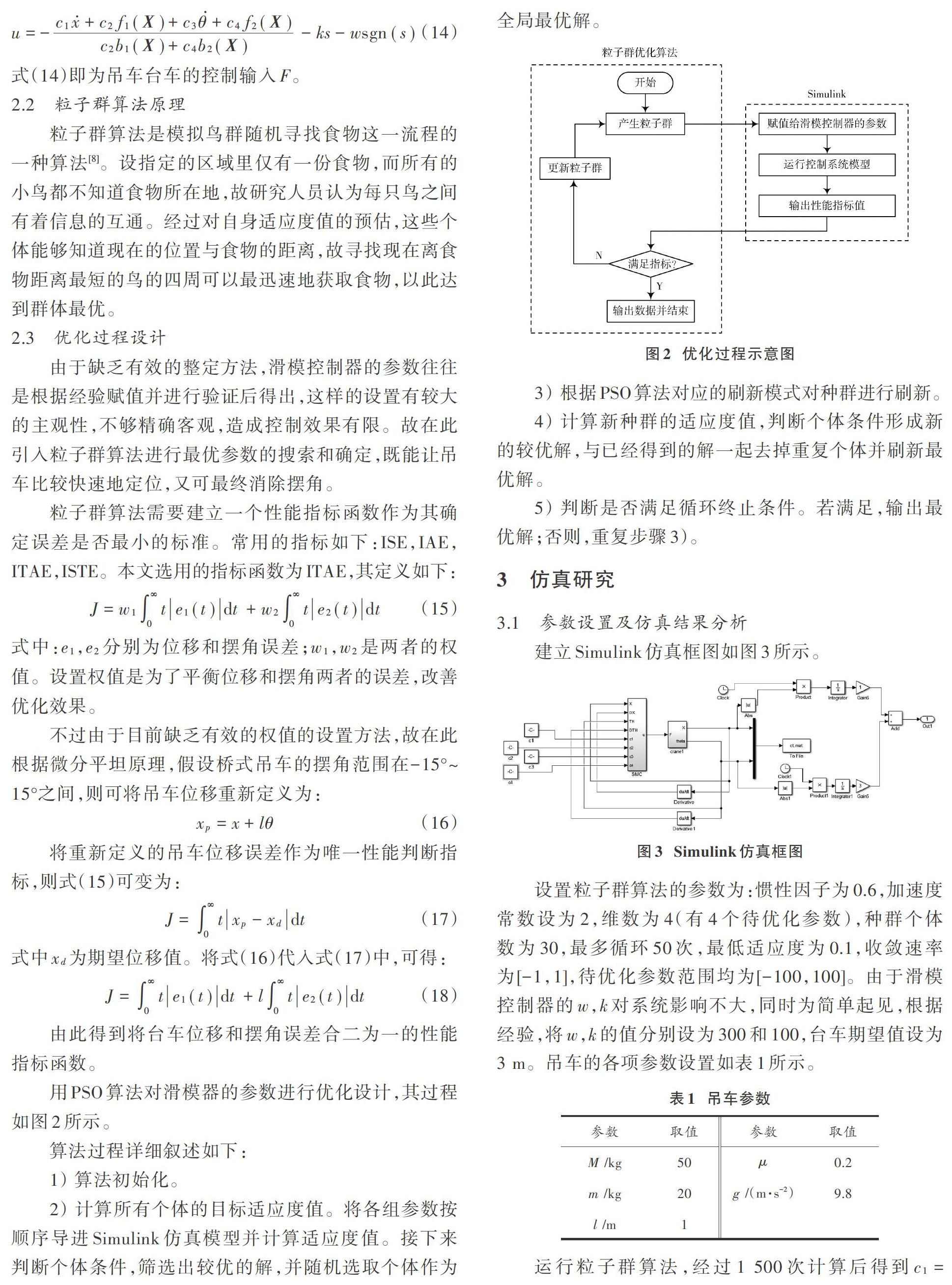
用PSO算法對滑模器的參數進行優化設計,其過程如圖2所示。
算法過程詳細敘述如下:
1) 算法初始化。
2) 計算所有個體的目標適應度值。將各組參數按順序導進Simulink仿真模型并計算適應度值。接下來判斷個體條件,篩選出較優的解,并隨機選取個體作為全局最優解。
3) 根據PSO算法對應的刷新模式對種群進行刷新。
4) 計算新種群的適應度值,判斷個體條件形成新的較優解,與已經得到的解一起去掉重復個體并刷新最優解。
5) 判斷是否滿足循環終止條件。若滿足,輸出最優解;否則,重復步驟3)。
3 ?仿真研究
3.1 ?參數設置及仿真結果分析
建立Simulink仿真框圖如圖3所示。
設置粒子群算法的參數為:慣性因子為0.6,加速度常數設為2,維數為4(有4個待優化參數),種群個體數為30,最多循環50次,最低適應度為0.1,收斂速率為[-1,1],待優化參數范圍均為[-100,100]。由于滑模控制器的[w],[k]對系統影響不大,同時為簡單起見,根據經驗,將[w],[k]的值分別設為300和100,臺車期望值設為3 m。吊車的各項參數設置如表1所示。
運行粒子群算法,經過1 500次計算后得到[c1=]1.836 975,[c2=]58.279 10,[c3=]5.423 948,[c4=]11.749 29,將4個值代入到控制模型中, 可得吊車位移、擺角及控制量的曲線圖,如圖4~圖6所示。
由圖4,圖5可知,臺車約在第11 s時抵達期望位置,同時,[θ]的最大值約為1.8°,盡管響應速度不算太快,但擺角也相應地減小了。與文獻[9]設計的模糊自整定PID法相比,盡管抵達指定處略慢,但[θ]也相應變小了;與文獻[10]設計的自適應神經網絡控制與學習法相比,本文方法不僅系統響應時間更慢,且擺角更小,而且擺角最終趨近于零。表2為各控制器性能對比。
由圖6可知,控制量曲線出現了高頻抖振現象,且控制力變化范圍過大(-300~300 N),不利于控制系統的正常工作,因此接下來將引入模糊規則來抑制抖振。
3.2 ?抑制抖振
在滑模控制中,理想的開關函數sgn()很難實現,時間及空間上的滯后會造成滑動模態反復穿越滑模面,從而造成抖振[11]。為了解決這一問題,可以引入模糊規則,根據滑模面及其變化率的積適當調節切換增益[w]的大小,從而降低抖振幅度。
在常規的滑模控制中,滑模存在的條件為[ss<0]。當此條件成立時,[w]應減小,即[Δw<0];若[ss>0],則[w]應增大,即[Δw>0],讓滑動模態向滑模面靠近。因此,設[e=ss],則[e]和[Δ][w]對應的函數關系如下:
1) 若[e>0],則[Δw>0];
2) 若[e<0],則[Δw<0]。
根據以上[e]和[Δw]對應的函數關系,可得[e]和[Δw]對應的模糊規則如表3所示。
模糊系統的輸入和輸出隸屬度函數如圖7,圖8所示。
由圖9~圖11可知,控制量的抖振幅度得到了大幅降低,大小基本上在-50~50 N內變化,處于可接受范圍內,而且臺車的位移曲線幾乎不變,擺角最大值略有降低,說明模糊規則的引入在降低抖振的同時保持了滑模控制器的控制性能。可見,用模糊規則降低抖振的方法適用于本吊車系統。
4 ?結 ?語
本文通過在Matlab中運行所設計的橋式吊車滑模控制器模型后,可得出如下結論:
1) 通過粒子群算法并結合微分平坦理論對滑模控制器的部分參數進行優化選擇之后,控制器讓吊車以較快速度定位的同時也消除了擺角,控制效果良好。
2) 由于傳統滑模控制器的控制量具有抖振這一問題,因此引入模糊控制降低抖振。結果表明經過模糊控制優化后控制量的抖振幅度得到了大幅降低,證明模糊規則可以有效抑制抖振。
注:本文通訊作者為劉惠康。
參考文獻
[1] 彭夢揚.高溫熔融金屬轉運大型橋式起重機智能控制方法研究[D].武漢:武漢科技大學,2018:1?2.
[2] 孫寧.欠驅動吊車軌跡規劃與非線性控制策略設計、分析及應用[D].天津:南開大學,2014:1?2.
[3] SUN Ning, FANG Yongchun. An efficient online trajectory genera?ting method for underactuatedcrane systems [J]. International journal of robust & nonlinear control, 2014, 24(11): 1653?1663.
[4] 朱長建,姜洪喆,王偉,等.汽車起重機吊物防擺可控因素實驗分析及理論研究[J].高技術通訊,2016,26(8):767?772.
[5] 閆冠宇,鄧淇文.專家PID吊車防擺定位控制系統[J].電子測試,2018(23):16?17.
[6] 劉金琨.滑模變結構控制Matlab仿真:基本理論與設計方法[M].3版.北京:清華大學出版社,2015:1?2.
[7] 黃凱.起重機自適應智能防擺控制方法及其仿真研究[D].南京:南京林業大學,2007:8?102.
[8] 杜云,劉冰,邵士凱,等.基于改進粒子群算法的無人機航跡規劃[J].河北工業科技,2019,36(5):335?340.
[9] 徐致遠.橋式吊車水平運動過程智能防擺控制技術研究[D].沈陽:沈陽工業大學,2005:49?52.
[10] 賴嘯,劉勇,代艷霞,等.橋式吊車系統的自適應神經網絡控制與學習[J].機械設計與制造,2018(6):114?117.
[11] 劉金琨.滑模變結構控制Matlab仿真:先進控制系統設計方法[M].4版.北京:清華大學出版社,2015:1?2.
