混凝土布料機(jī)布料厚度測(cè)量系統(tǒng)
2020-12-23 04:33:21陳章華馬月輝石彥輝
現(xiàn)代電子技術(shù) 2020年23期
陳章華 馬月輝 石彥輝
摘 ?要: 針對(duì)混凝土布料機(jī)布料厚度測(cè)量中超聲波法存在測(cè)量盲區(qū)、激光測(cè)距法只能單點(diǎn)間斷測(cè)量等問(wèn)題,提出一種基于雙目視覺(jué)的混凝土布料機(jī)布料厚度測(cè)量方法。利用雙目視覺(jué),通過(guò)基于區(qū)域和ORB特征相結(jié)合的立體匹配算法實(shí)現(xiàn)了對(duì)布料后預(yù)制混凝土構(gòu)件任意一點(diǎn)混凝土厚度的大范圍、連續(xù)、高精度測(cè)量。實(shí)驗(yàn)結(jié)果表明,采用該系統(tǒng)進(jìn)行混凝土布料機(jī)布料厚度測(cè)量絕對(duì)誤差不超過(guò)0.83 mm,完全滿(mǎn)足測(cè)量要求。
關(guān)鍵詞: 測(cè)量系統(tǒng); 厚度測(cè)量; 圖像預(yù)處理; 系統(tǒng)原理; 特征檢測(cè); 特征匹配
中圖分類(lèi)號(hào): TN98?34; TP273.2 ? ? ? ? ? ? ? ? ? 文獻(xiàn)標(biāo)識(shí)碼: A ? ? ? ? ? ? ? ? ? ? 文章編號(hào): 1004?373X(2020)23?0076?03
Abstract: As the ultrasonic measuring method has measurement blind area and the laser ranging method can only make single?point discontinuity measurement for concrete distribution thickness made by concrete distributor, a new distribution thickness measuring method based on binocular vision is proposed in this paper. By binocular vision and stereo matching algorithm based on region and ORB features, the continuous, wide?range and high?precision measurement of concrete thickness is realized at any position of precast concrete units. The experimental results show that the absolute error of the system for distribution thickness measurement is less than 0.83 mm, which fully meets the measurement requirements.
Keywords: measuring system; thickness measurement; image pre?processing; system theory; feature detection; feature matching
0 ?引 ?言
21世紀(jì)以來(lái),預(yù)制裝配式建筑技術(shù)得到了飛速的發(fā)展,在世界范圍內(nèi)已經(jīng)成為建筑工業(yè)化潮流的主流發(fā)展趨勢(shì)。在裝配式建筑建造過(guò)程中,預(yù)制混凝土構(gòu)件是其中的核心組成部分,預(yù)制構(gòu)件的質(zhì)量直接影響著裝配式建筑的施工質(zhì)量及使用性能。預(yù)制混凝土構(gòu)件的質(zhì)量在很大程度上取決于布料過(guò)程的檢測(cè)精度,尤其對(duì)于比較復(fù)雜的構(gòu)件,若不能準(zhǔn)確測(cè)量布料過(guò)程中不同位置的混凝土厚度,則不能準(zhǔn)確指導(dǎo)布料機(jī)進(jìn)行布料,從而導(dǎo)致生產(chǎn)的預(yù)制構(gòu)件達(dá)不到施工要求,影響整個(gè)建筑工程的質(zhì)量和工期。
《裝配式混凝土建筑技術(shù)標(biāo)準(zhǔn)GB/T 51231?2016》中規(guī)定預(yù)制混凝土樓板厚度允許偏差為5 mm,預(yù)制混凝土墻板厚度允許偏差為3 mm。目前,國(guó)內(nèi)外混凝土布料厚度檢測(cè)大多采用人工測(cè)量、超聲波測(cè)距、激光測(cè)距等方法。人工測(cè)量法一般采用尺量板,精度受人為影響大,費(fèi)時(shí)費(fèi)力。文獻(xiàn)[1]采用頻率為50 Hz的超聲波傳感器測(cè)量厚度為500 mm的混凝土構(gòu)件,最大誤差不超過(guò)19.5 mm。文獻(xiàn)[2]采用相位式激光測(cè)距傳感器測(cè)量預(yù)制構(gòu)件的厚度信息,測(cè)量誤差可達(dá)到±1 mm。激光測(cè)距雖然具有精度高、非接觸的優(yōu)點(diǎn),但是只能單點(diǎn)測(cè)量,無(wú)法實(shí)現(xiàn)大范圍測(cè)量(例如一般為4 m×2 m的預(yù)制混凝土板)。因此,本文提出了基于雙目視覺(jué)[3]的混凝土布料機(jī)布料厚度測(cè)量系統(tǒng),能夠?qū)崿F(xiàn)高精度、大范圍、無(wú)盲點(diǎn)的厚度測(cè)量。
1 ?系統(tǒng)原理
1.1 ?系統(tǒng)組成
混凝土布料機(jī)布料厚度測(cè)量系統(tǒng)由千兆以太網(wǎng)工業(yè)相機(jī)(2個(gè))、相機(jī)支架和預(yù)裝相應(yīng)軟件的計(jì)算機(jī)組成,系統(tǒng)硬件示意圖如圖1所示。首先,將相機(jī)固定在混凝土預(yù)制板上方固定位置;然后通過(guò)數(shù)據(jù)線(xiàn)與計(jì)算機(jī)相連,通過(guò)相機(jī)采集被測(cè)物圖像,并傳到計(jì)算機(jī)上進(jìn)行圖像處理,從而實(shí)現(xiàn)混凝土布料機(jī)布料厚度測(cè)量。
1.2 ?系統(tǒng)原理
安裝時(shí)將相機(jī)固定在相機(jī)支架上,采集棋盤(pán)格圖像,采用張正友標(biāo)定法[3]對(duì)相機(jī)進(jìn)行雙目標(biāo)定,把標(biāo)定參數(shù)讀入程序中,對(duì)采集的被測(cè)物圖像進(jìn)行預(yù)處理;然后對(duì)圖像進(jìn)行特征點(diǎn)檢測(cè)得到描述子信息;再通過(guò)立體匹配尋找匹配點(diǎn),最后根據(jù)匹配結(jié)果通過(guò)左右圖像的視差計(jì)算布料機(jī)布料后的距離信息,并根據(jù)未布料時(shí)的距離信息得到成像視場(chǎng)區(qū)域內(nèi)的布料厚度信息。系統(tǒng)流程圖如圖2所示。
1.3 ?雙目立體視覺(jué)測(cè)距模型
如圖3所示,理想的雙目立體視覺(jué)模型假定兩相機(jī)光軸平行,在簡(jiǎn)單的測(cè)距應(yīng)用中只要得到目標(biāo)點(diǎn)[z]軸坐標(biāo)即可,因此建立[x?z]平面模型。
2 ?相機(jī)標(biāo)定與圖像預(yù)處理
通過(guò)張正友棋盤(pán)格標(biāo)定法對(duì)相機(jī)進(jìn)行標(biāo)定。讀入一系列拍攝的棋盤(pán)格圖像,標(biāo)定相機(jī)內(nèi)參數(shù)IntrinsicMatrix,徑向畸變參數(shù)[K1],[K2],[K3],切向畸變參數(shù)[P1],[P],旋轉(zhuǎn)矩陣[R]和平移向量[T]對(duì)圖像進(jìn)行校正,校正后左右相機(jī)圖像已經(jīng)共面并且行對(duì)準(zhǔn),并對(duì)圖像進(jìn)行雙邊濾波預(yù)處理保邊去噪。拍攝圖像如圖4所示,校正后圖像如圖5所示。
3 ?特征檢測(cè)與匹配
立體匹配作為雙目立體視覺(jué)系統(tǒng)中最核心的步驟,其實(shí)質(zhì)為根據(jù)雙目相機(jī)對(duì)三維場(chǎng)景所獲取的左右圖像,獲取真實(shí)視場(chǎng)中同一空間點(diǎn)在左右圖像中的匹配投影點(diǎn),并由此得到相應(yīng)的視差圖。立體匹配算法一般分為局部立體匹配算法[4]與全局立體匹配算法[5],局部立體匹配算法由于其實(shí)時(shí)性好,計(jì)算復(fù)雜度低,在立體匹配領(lǐng)域得到了廣泛的應(yīng)用。
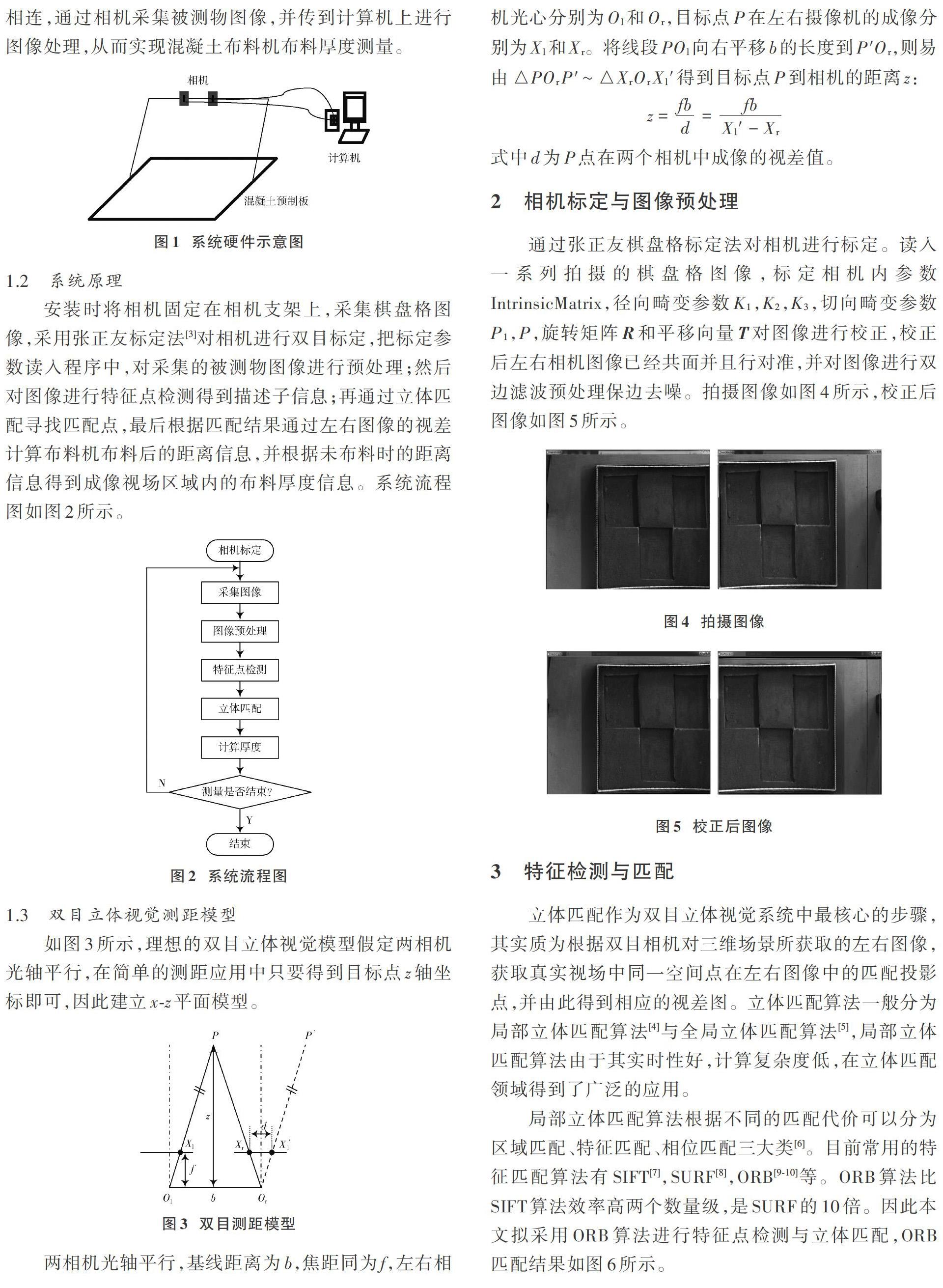
局部立體匹配算法根據(jù)不同的匹配代價(jià)可以分為區(qū)域匹配、特征匹配、相位匹配三大類(lèi)[6]。目前常用的特征匹配算法有SIFT[7],SURF[8],ORB[9?10]等。ORB算法比SIFT算法效率高兩個(gè)數(shù)量級(jí),是SURF的10倍。因此本文擬采用ORB算法進(jìn)行特征點(diǎn)檢測(cè)與立體匹配,ORB匹配結(jié)果如圖6所示。
由圖6可知該算法只能對(duì)較明顯的特征進(jìn)行匹配,不能對(duì)混凝土預(yù)制板任意一點(diǎn)厚度進(jìn)行匹配,不滿(mǎn)足測(cè)量要求。基于此,本文提出了基于區(qū)域和ORB特征的立體匹配算法。
算法步驟如下:
Step1:利用OFAST算法強(qiáng)制對(duì)左右圖像上的所有點(diǎn)進(jìn)行特征檢測(cè),采用rBRIEF算法進(jìn)行特征描述。
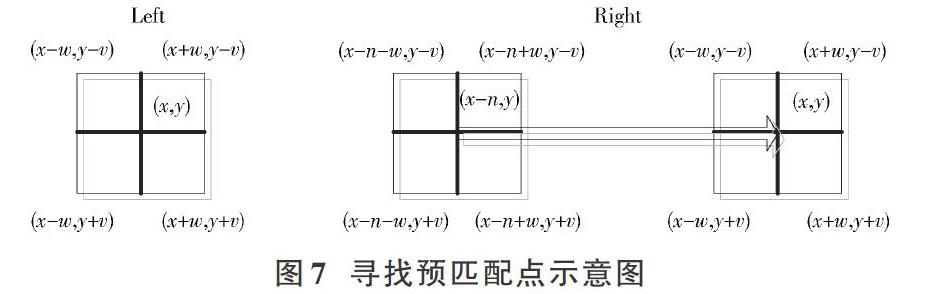
Step2:定義閾值[n],匹配窗口長(zhǎng)[w],寬[v],當(dāng)在左圖像上點(diǎn)擊鼠標(biāo)左鍵時(shí)獲得像素坐標(biāo)為[(x,y)],以右圖像上[(x-n,y)]為中心、長(zhǎng)為2[w]寬為2[v]的矩形匹配窗口開(kāi)始,到以[(x,y)]為中心、長(zhǎng)為2[w]寬為2[v]的矩形匹配窗口結(jié)束,在右圖像上尋找預(yù)匹配點(diǎn)。計(jì)算每個(gè)匹配窗口描述子漢明距離均值,找到最小值,此時(shí)對(duì)應(yīng)的右圖像像素點(diǎn)[(Rx,y)]即為左圖像像素點(diǎn)預(yù)匹配點(diǎn)。尋找預(yù)匹配點(diǎn)示意圖如圖7所示。
Step3:以左圖像上([Rx,y)]為中心,長(zhǎng)為[2w]寬為[2v]的矩形匹配窗口開(kāi)始,到以[(x,y)]為中心,長(zhǎng)為[2w]寬為[2v]的矩形匹配窗口結(jié)束,在左圖像上尋找右圖像上[(Rx,y)]最佳預(yù)匹配點(diǎn)。計(jì)算每個(gè)匹配窗口描述子漢明距離均值,找到最小值,此時(shí)對(duì)應(yīng)的左圖像像素點(diǎn)[(Lx,y)]即為右圖像像素點(diǎn)最佳預(yù)匹配點(diǎn)。尋找最佳預(yù)匹配點(diǎn)示意圖如圖8所示。
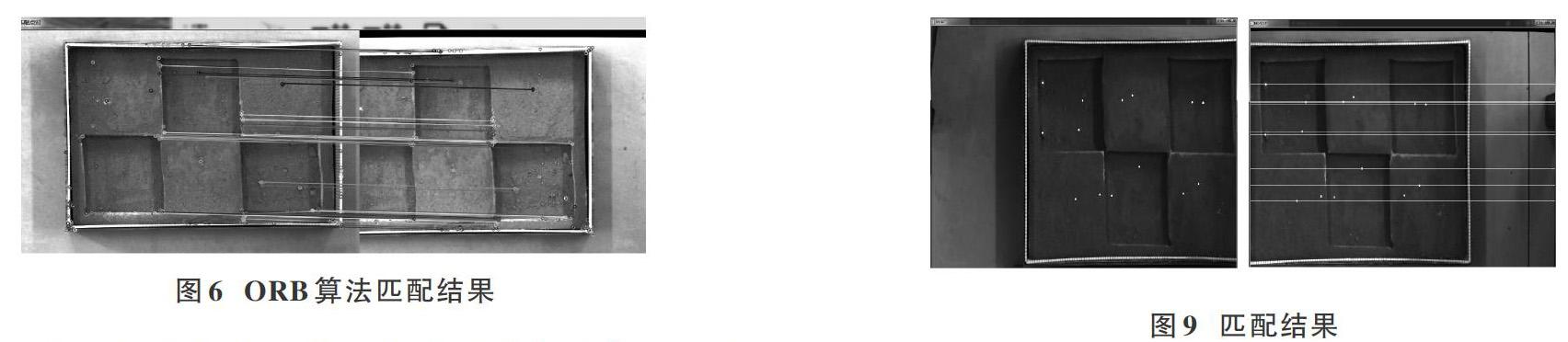
Step4:判斷左圖像上最佳預(yù)匹配點(diǎn)[Lx]和[x]之差是否小于設(shè)定值,如果小于設(shè)定值,則右圖像上[(Rx,y)]為左圖像上[(Lx,y)]最佳匹配點(diǎn);否則匹配錯(cuò)誤。匹配結(jié)果如圖9所示。
4 ?實(shí)驗(yàn)分析與討論
本系統(tǒng)中采用2臺(tái)維視MV?EM200M千兆以太網(wǎng)工業(yè)相機(jī)進(jìn)行圖像采集,MV?EM200M工業(yè)相機(jī)如圖10所示。采用如圖11所示6個(gè)錯(cuò)落有致的混凝土格來(lái)模擬測(cè)量混凝土布料機(jī)布料厚度實(shí)驗(yàn)。
實(shí)驗(yàn)中通過(guò)刻度尺測(cè)量模具厚度,即表1中實(shí)際厚度,通過(guò)該系統(tǒng)測(cè)量所得厚度為測(cè)量厚度,并計(jì)算測(cè)量的相對(duì)誤差與絕對(duì)誤差。測(cè)量結(jié)果及分析如表1所示。
由表1實(shí)驗(yàn)數(shù)據(jù)可以看出,該系統(tǒng)存在測(cè)量誤差,且絕對(duì)誤差不超過(guò)0.83 mm。可能的誤差來(lái)源為:
1) 外界環(huán)境的干擾。采集圖像時(shí)光照對(duì)圖像造成影響。
2) 實(shí)際測(cè)量存在誤差。當(dāng)用刻度尺測(cè)量模具高度差時(shí),由于人為因素的影響,不可避免地產(chǎn)生測(cè)量誤差。
5 ?結(jié) ?語(yǔ)
本文設(shè)計(jì)了基于雙目視覺(jué)的厚度測(cè)量系統(tǒng),提出了利用基于區(qū)域和ORB特征的匹配算法,結(jié)合極限約束進(jìn)行立體匹配與厚度測(cè)量,實(shí)現(xiàn)了混凝土布料機(jī)布料厚度測(cè)量。實(shí)驗(yàn)結(jié)果證明了該測(cè)量系統(tǒng)的有效性。
參考文獻(xiàn)
[1] 周凱.超聲波混凝土構(gòu)件檢測(cè)系統(tǒng)的研究及試驗(yàn)分析[D].長(zhǎng)沙:中南大學(xué),2007.
[2] 丁凱悅.預(yù)制混凝土布料機(jī)數(shù)控技術(shù)研究[D].石家莊:石家莊鐵道大學(xué),2019.
[3] 周科杰.雙目視覺(jué)三維測(cè)量技術(shù)研究與應(yīng)用[D].北京:中國(guó)科學(xué)院大學(xué),2019.
[4] ZHANG Zhenyou. A flexible new technique for camera calibration [J]. IEEE transactions on pattern analysis and machine intelligence, 2000, 22(11): 1330?1334.
[5] 孫明珠.面向低紋理區(qū)域的局部立體匹配算法研究[D].秦皇島:燕山大學(xué),2018.
[6] 曹之樂(lè),嚴(yán)中紅,王洪.雙目立體匹配技術(shù)綜述[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)版),2015,29(2):70?75.
[7] 王梓任,楊友良,馬翠紅.一種面向三維重建的改進(jìn)SIFT圖像匹配算法[J].網(wǎng)絡(luò)安全技術(shù)與應(yīng)用,2019(8):35?38.
[8] 王錦坤,張秋菊.基于SURF算法的紅外圖像拼接方法的改進(jìn)[J].輕工機(jī)械,2019,37(3):66?71.
[9] 袁小平,張毅,張俠,等.基于改進(jìn)FAST檢測(cè)的ORB特征匹配算法[J].科學(xué)技術(shù)與工程,2019,19(21):233?238.
[10] LUO Chuan, YANG Wei, HUANG Panling, et al. Overview of image matching based on ORB algorithm [EB/OL]. [2019?07?12]. https://iopscience.iop.org/article/10.1088/1742?6596/1237/3/032020/pdf.

- 現(xiàn)代電子技術(shù)的其它文章
- 融合關(guān)聯(lián)規(guī)則挖掘算法的信息化教學(xué)管理系統(tǒng)設(shè)計(jì)
- 基于離線(xiàn)搜索法的IPMSM效率優(yōu)化控制搜索空間研究
- 基于B/S模式的物流企業(yè)信息系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- APP界面設(shè)計(jì)與移動(dòng)交互體驗(yàn)設(shè)計(jì)
- 互聯(lián)網(wǎng)背景下基于ASP技術(shù)的大學(xué)遠(yuǎn)程教育系統(tǒng)設(shè)計(jì)
- 物聯(lián)網(wǎng)技術(shù)的多媒體實(shí)驗(yàn)室智能管理系統(tǒng)