Gamma-Gamma湍流信道下廣義空時脈沖位置調制
2020-12-23 09:11:18王惠琴張莉萍包仲賢
光學精密工程 2020年11期
關鍵詞:系統
張 悅,王惠琴*,張莉萍,包仲賢
(1.蘭州理工大學 計算機與通信學院,甘肅 蘭州 730050;2.中國鐵路蘭州局集團有限公司 蘭州通信段, 甘肅 蘭州 730000)
1 引 言
無線光通信(Wireless Optical Communication,WOC)作為一種全新的接入技術,因具有帶寬不受限、傳輸速率高、安全性強等優勢成為了近年來的研究熱點[1]。但是隨著物聯網、大數據以及人工智能等技術的迅猛發展,由此產生的海量數據對WOC系統的傳輸速率提出了更高的要求,這就對現有的無線光通信技術提出了新的挑戰。光空間調制(Optical Spatial Modulation,OSM)技術的出現為解決該問題提供了一種新的途徑[2]。
OSM作為一種新型的光多輸入多輸出(Optical Multple Input Multiple Output,OMIMO)傳輸技術,有效地利用了空間資源,在傳統二維信號星座圖的基礎上增加了一維空間域映射(即激活激光器索引映射)。這樣不僅可以利用傳統的調制符號傳輸信息,還可以將另一部分信息隱含于激活激光器的索引中,使激光器的索引號成為一種額外數據信息的攜帶方式,從而提高系統的傳輸速率[3-4]。另外,由于OSM每次只激活一個激光器發送信息,有效地避免了OMIMO系統中存在的信道間干擾強、信道同步難以及接收端譯碼復雜度高等問題[5-6]。因此,OSM已成為大規模OMIMO通信中頗具應用前景的備選方案之一。
近年來,大量學者致力于OSM技術及其拓展應用的研究,已取得了一些研究成果[7-12]。文獻[7]將OSM與脈沖位置-幅度調制(PPAM)相結合,提出一種具有高能量效率和高頻譜效率的光空間脈沖位置-幅度聯合調制(SPPAM),為OSM技術的研究奠定了理論基礎。后來,文獻[8-9]針對Gamma-Gamma衰落信道,推導了SPPM系統的理論誤碼率表達式。同時,構建了一種自適應閉環SPPM方案。相較于開環OSM,該方案有效改善了系統的誤碼性能。為了進一步降低OSM系統的復雜度,光空移鍵控(Optical Space Shift Keying,OSSK)被提出[10]。作為一種特殊的OSM技術,它僅利用激活激光器索引來傳輸信息。文獻[11]分別針對對數正態、Gamma-Gamma和負指數3種衰落信道,研究了大氣湍流和瞄準誤差對OSSK系統信道容量和誤碼率的影響。隨后,文獻[12]提出了一種發射端基于部分信道增益排序的OSSK系統(PIT-OSSK),利用已知的部分信道增益,自適應地調整星座映射和功率分配,有效提升了系統的誤碼性能。
在上述OSM和OSSK方案中,僅利用空間資源實現了系統傳輸速率的提升,而忽視了其他資源的利用,如時間資源等。因此,本文將線性彌散碼引入OSM,通過充分挖掘空間和時間資源設計了一種廣義空時彌散矩陣,并與空間脈沖位置調制相結合提出了廣義空時脈沖位置調制(Generalized Space-Time Pulse Position Modulation,GSTPPM),實現了系統傳輸速率和誤碼性能的有效提升。
2 廣義空時脈沖位置調制系統模型
為了提高系統的傳輸速率和誤碼性能,GSTPPM方案除了利用傳統調制符號傳遞信息外,還利用激活激光器構造的廣義空時彌散矩陣來傳遞信息。對于一個有Nt個激光器(LD)和Nr個光電探測器(PD)的GSTPPM系統(LD和PD的排列方式為均勻圓陣,且LD陣列的圓心與PD陣列的圓心相對應),其系統模型如圖1所示。在圖1中,將經過串/并變換的二進制比特流分成長度為B=[b1,b2]比特的數據塊。其中,b1比特經過兩次映射后被映射為廣義空時彌散矩陣,b2比特被映射為不同激活激光器上加載的不同脈沖位置調制(Pulse Position Modulation,PPM)符號(即采用復用技術)。將兩次映射的空時彌散矩陣與調制符號向量分別做克羅內克乘積后相加即可得到GSTPPM信號。該信號經發送光學天線、大氣湍流信道、接收光學天線后由光電探測器轉換成電信號,再經球形譯碼算法(SD)檢測以及解映射即可恢復出原始比特數據塊。
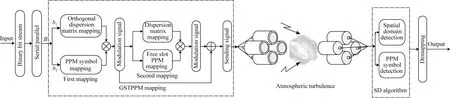
圖1 GSTPPM系統模型
2.1 映射規則
根據映射規則,GSTPPM系統可分為空間域映射(即廣義空時彌散矩陣映射)和信號域映射(PPM調制符號映射)。

xc=xrs?xrp,
(1)
其中:xc被擴展為一個Nt×(NtL)維的矩陣。該矩陣可以看成是由Nt個僅含一個非零元素的Nt×L維向量xtci構成,可表示為xc=[xtc1,xtc2,…,xtci,…xtcNt]。其中,xtci由xtsi擴展L列后得到。
至此,空間域映射已完成,即獲得了廣義空時彌散矩陣xs。映射后的xs是一個含有Nt+1個非零元素的Nt×Nt維方陣,其中僅有一列含有兩個非零元素,其余列中只有一個非零元素。

綜上所述,GSTPPM映射后的發送信號X為:
X=xc+xo.
(2)

因此,GSTPPM系統的傳輸速率為:
V=log2(Nt!)+Ntlog2L+
log2[Nt(Nt-1)(L-1)].
(3)
相應地,該系統的頻譜效率可表示為{log2(Nt!)+Ntlog2L+log2[Nt(Nt-1)(L-1)]}/(NtL) bit/(s·Hz-1)。
依據上述映射規則,以Nt=2,L=2為例,給出了GSTPPM系統的映射,如表1所示。此時,GSTPPM系統的傳輸速率為4 bpcu。
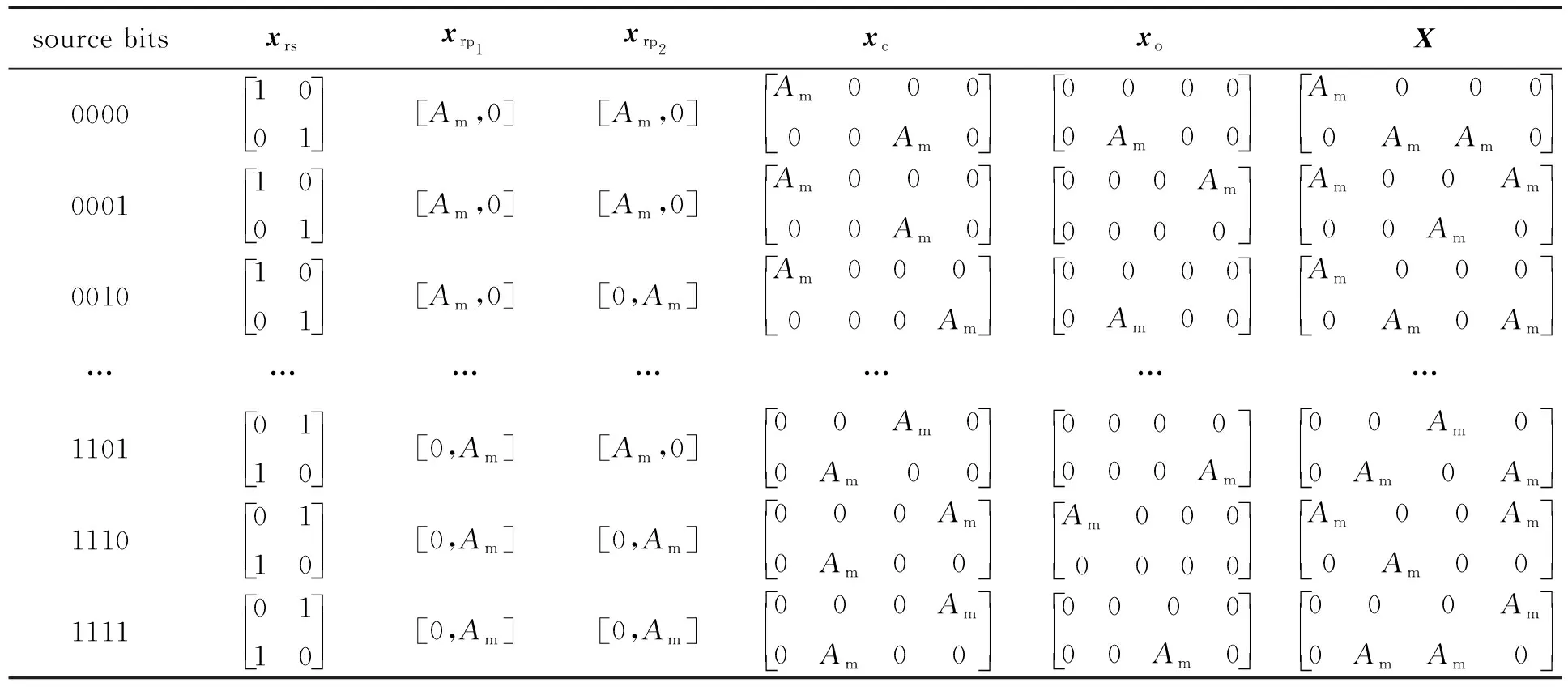
表1 GSTPPM系統映射碼字
2.2 信道模型
發送信號X經過大氣信道后由探測器接收。假設探測器的輸出信號為:
Y=γHX+n,
(4)

(5)
其中:Kν(·)為ν階第二類修正Bessel函數,Γ(·)為Gamma函數,α,β分別為大尺度和小尺度散射系數,可分別表示為:
(6)
(7)

2.3 檢測算法
目前,在OSM中應用最多的檢測算法是最大似然(Maximum Likelihood,ML)檢測準則。該算法是一種性能最優的接收機檢測算法,但檢測時需要窮盡搜索,使得其計算復雜度很高,通常將ML作為一種性能界來衡量其他譯碼算法的性能。和ML譯碼算法相比,球形譯碼算法能在有效降低系統檢測復雜度的同時獲得比擬ML檢測的性能[14]。鑒于此,本文采用球形譯碼算法完成廣義空時彌散矩陣索引和PPM符號的檢測。

表2 GSTPPM-SD算法流程
2.4 復雜度分析
計算復雜度是衡量一種算法能否被廣泛應用的關鍵,下面對GSTPPM-SD算法的計算復雜度進行分析。將所有公式的運行時間作為計算復雜度,首先定義:
U(xs,xp)(χ,η)=Y(χ,η)-H(χ,η)X(χ,η),
(8)
其中Y(χ,η)=H(χ,η)Xt(χ,η)+n。將Y帶入式(8)可得:
U(xs,xp)(χ,η)=τ(xs,xp)(χ,η)+n,
(9)
其中:τ(xs,xp)(χ,η)=H(χ,η)[Xt(χ,η)-X(χ,η)],Xt(χ,η)表示第t時刻發送的信息。
由式(9)可知,U(xs,xp)(χ,η)的概率密度函數為:
(10)
那么,路徑(xs,xp)中歐氏距離平方的累加和為:
(11)

以ξ為半徑的球面內存在路徑(xs,xp)的概率是:
(12)

(13)
其中Qm(·)為MarcumQ函數。那么,每條路徑(xs,xp)上計算歐氏距離的運行時間為:
(14)
所以,所有路徑上公式運行的總時間(即總計算復雜度)為:

(15)
對于ML檢測,需要遍歷所有的(xs,xp)。由于xs∈Λs,xp∈Λp,則ML的計算復雜度為:
OML=2log2(Nt!)·[Nt(Nt-1)(L-1)]LNt·NtNr.
(16)
因此,與ML相比,SD算法計算復雜度的降低率為:
(17)
將式(15)與式(16)帶入式(17)即可計算出R的具體數值。
3 系統誤碼率
在信道狀態信息(CSI)已知的情況下,可通過聯合界技術獲得GSTPPM系統誤碼率的理論上界[17]:
(18)
(19)
將式(4)帶入式(19)可計算得到:
(20)
(21)

那么,將式(21)代入式(18)中,可得GSTPPM的誤碼率為:
(22)
由式(22)可知,GSTPPM系統的誤碼率與系統的傳輸速率、發送信號和估計信號之間的漢明距離、光電轉換效率、噪聲方差以及信道狀態矩陣有關。
4 仿 真

圖2為GSTPPM系統誤碼率的理論上界與蒙特卡洛仿真性能。由圖2可知:當信噪比較低(SNR<27)時,GSTPPM系統的實際誤碼率低于理論上界;而當信噪比較大(SNR>27)時,誤碼率的理論上界曲線與實際曲線重合,這說明理論推導是正確的。在激光器數目不變的情況下,GSTPPM系統的誤碼性能隨探測器數目的增加而明顯改善。當BER=10-3時,相對于Nr=3的系統而言,Nr=5的系統信噪比改善了約6.5 dB。因此,在該系統中可以通過適當增加探測器的數目來降低系統的誤碼率。
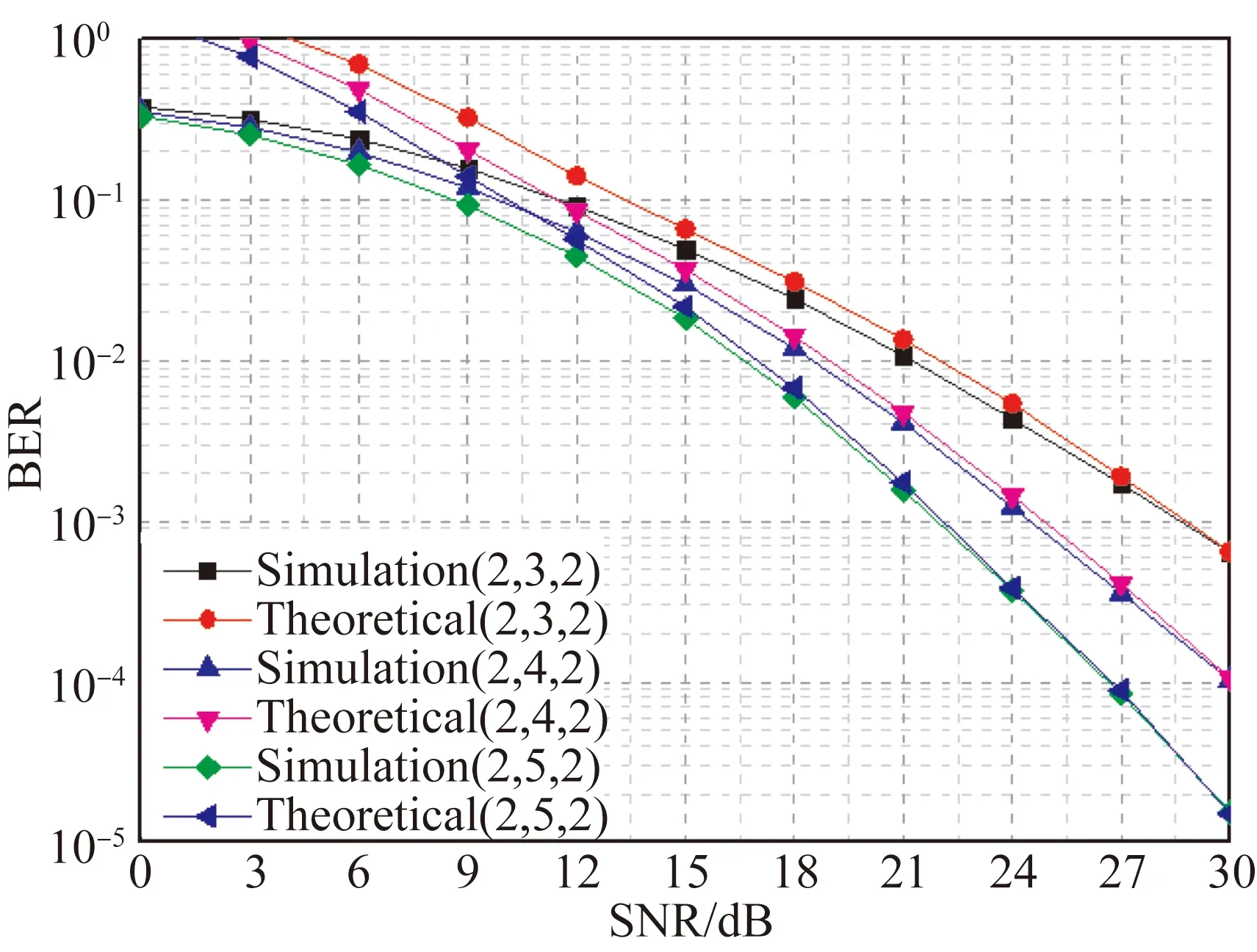
圖2 GSTPPM系統誤碼率的理論上界與仿真性能
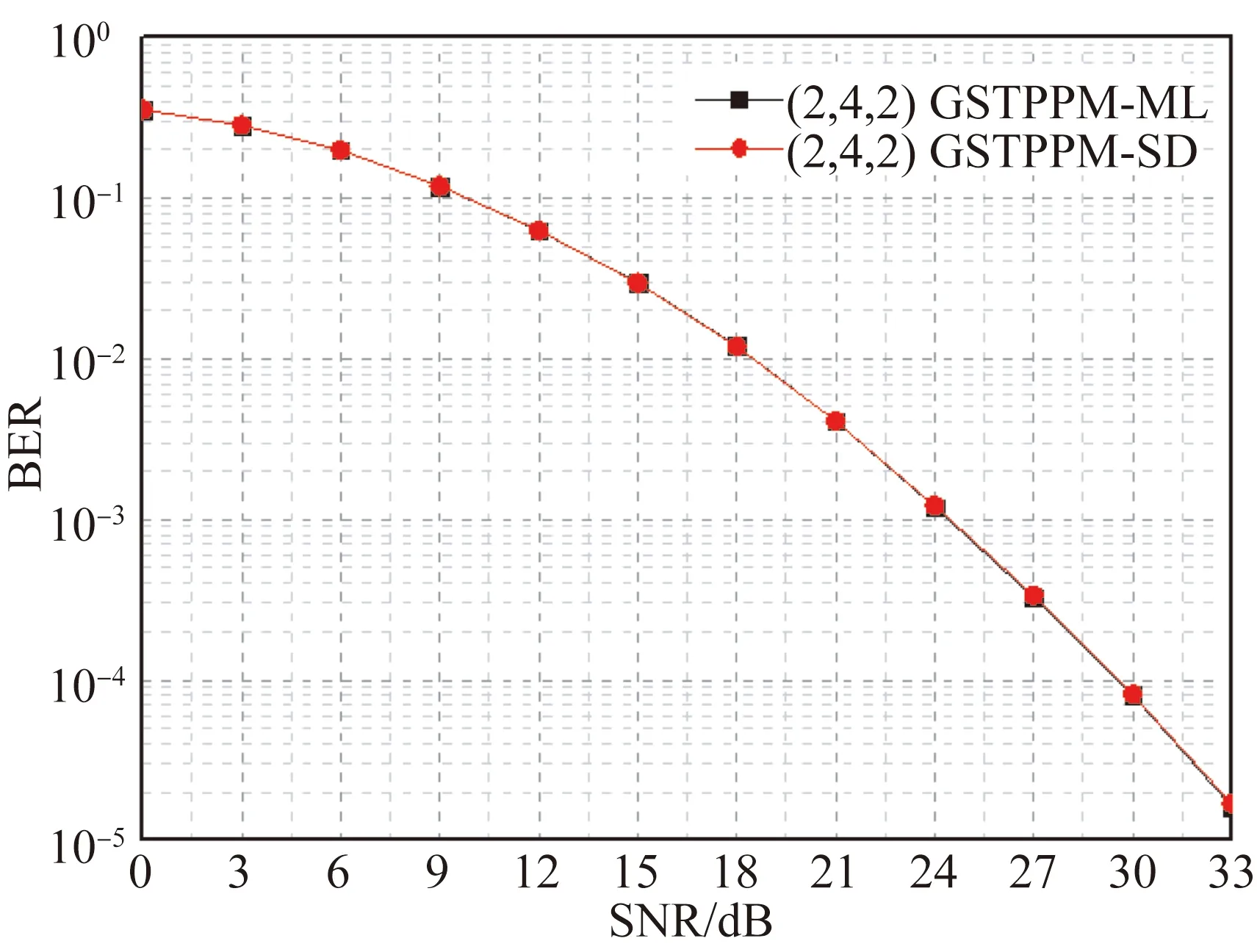
圖3 ML和SD檢測算法的誤碼率
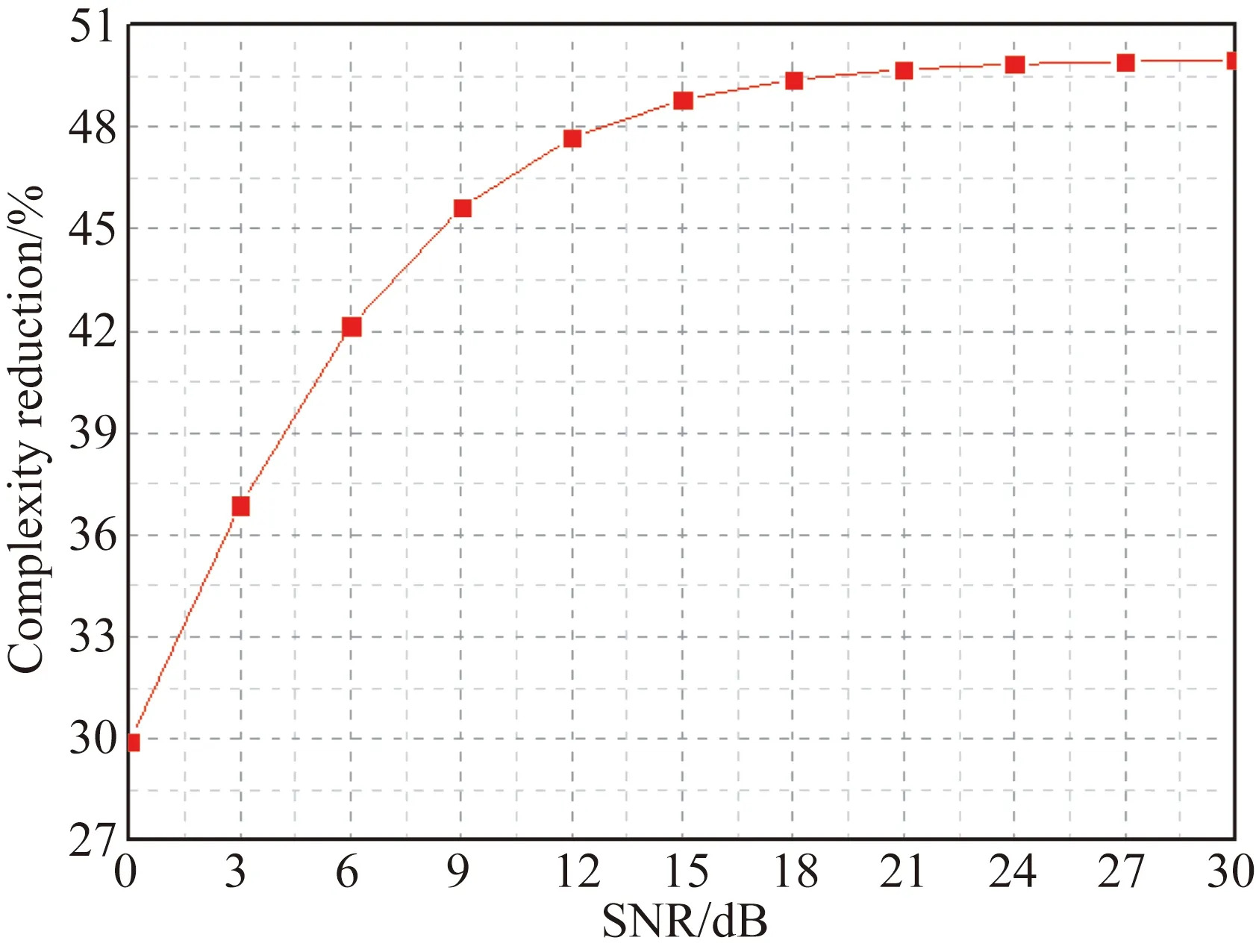
圖4 SD算法的計算復雜度降低率
圖3為采用ML檢測和SD算法時GSTPPM系統的誤碼率。由圖3可知,采用ML算法和SD算法的系統誤碼率曲線重合,說明SD算法的譯碼性能與ML相近,基本可以達到最佳接收。圖4 為SD算法的計算復雜度降低率。由圖4可知,在信噪比大于24 dB后,相較于ML算法,SD算法的計算復雜度減少了約50%。由于SD算法的計算復雜度與球面半徑ξ相關,ξ越大,計算復雜度也就越高;否則,反之。然而,ξ的大小又由信噪比決定。信噪比較小時,受噪聲影響SD算法的半徑無法更新到最小半徑,其計算復雜度較高。同理,當信噪比逐漸增大時,噪聲影響逐漸減小,此時更新后的半徑最小,可將其視為最優半徑,所以計算復雜度逐漸減小并趨于不變。由式(17)可知,相比ML算法,SD算法的計算復雜度逐漸減小并最終趨于不變。由上述分析可知,SD算法在具有最優譯碼性能的同時還具有較低的譯碼復雜度,因此本文采用SD算法進行譯碼。
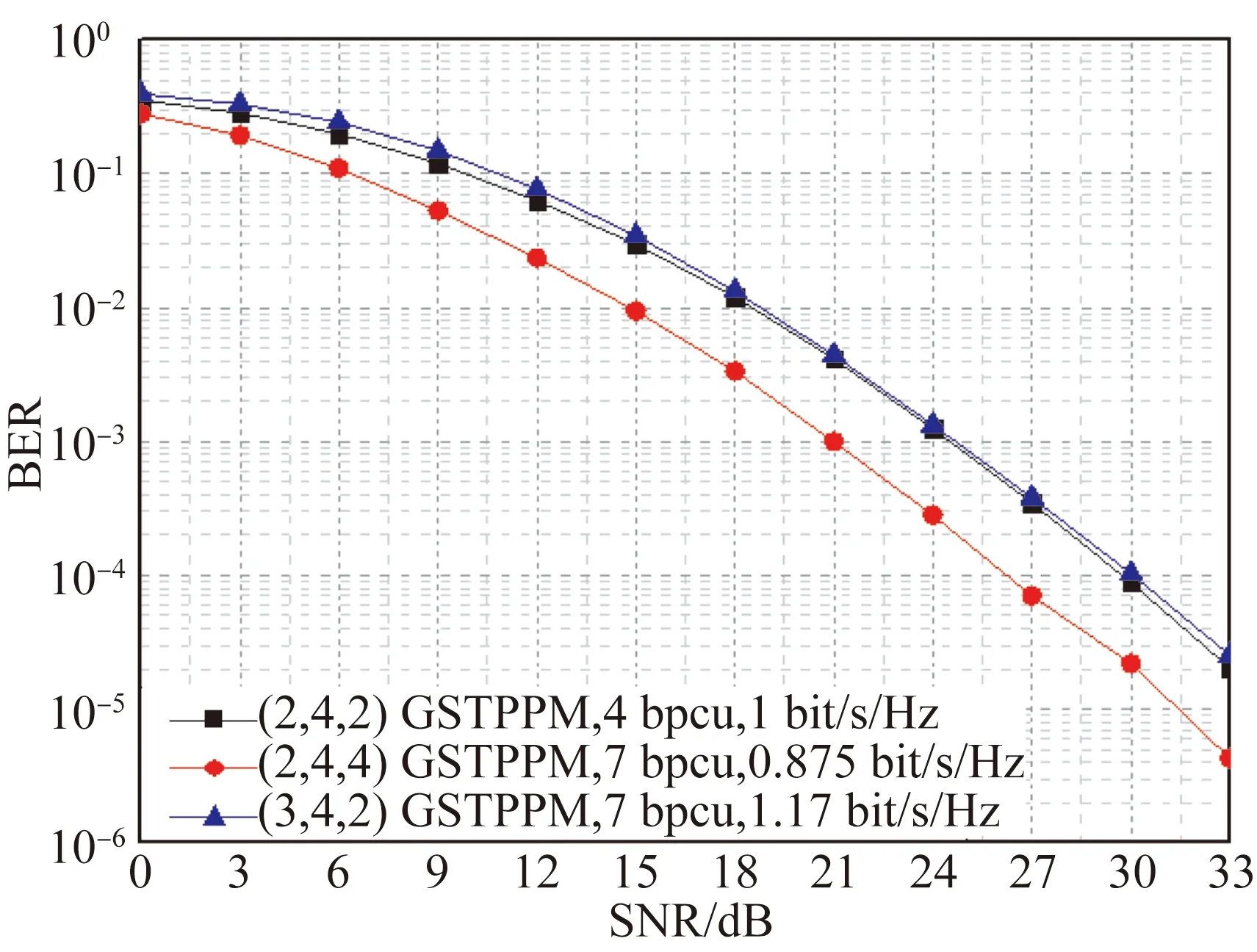
圖5 不同參數下GSTPPM系統的誤碼性能
圖5為不同GSTPPM系統的誤碼率曲線。由圖5可知:比較(2,4,2)系統和(3,4,2)系統可知,在探測器數目和調制階數相同的情況下,隨著激光器數目的增加,雖然GSTPPM系統的誤碼率會略微增大,但其頻譜效率和傳輸速率均得到了提升。(3,4,2)系統的傳輸速率比(2,4,2)系統提高了近一倍,頻譜效率提高了0.17 bit/(s·Hz-1),而在BER=10-4時,其信噪比僅僅損失了約0.2 dB。比較(2,4,2)系統和(2,4,4)系統可得,在激光器數目和探測器數目相同的情況下,增大調制階數會使系統的傳輸速率和誤碼性能得到提升,但其頻譜效率有所損失。當BER=10-4時,(2,4,4)系統比(2,4,2)系統的信噪比改善了約3.75 dB,而頻譜效率僅損失了0.125 bit/(s·Hz-1)。由此可知,增加激光器數目和調制階數均可提高系統的傳輸速率,但增加激光器數目會增大系統誤碼率和建設成本;增大調制階數則會犧牲系統的頻譜效率,但在WOC中頻譜效率不是衡量系統性能的主要參數。因此,在探測器數目確定的情況下,通過增大調制階數來提高系統的傳輸速率和誤碼性能是一種更好的選擇。
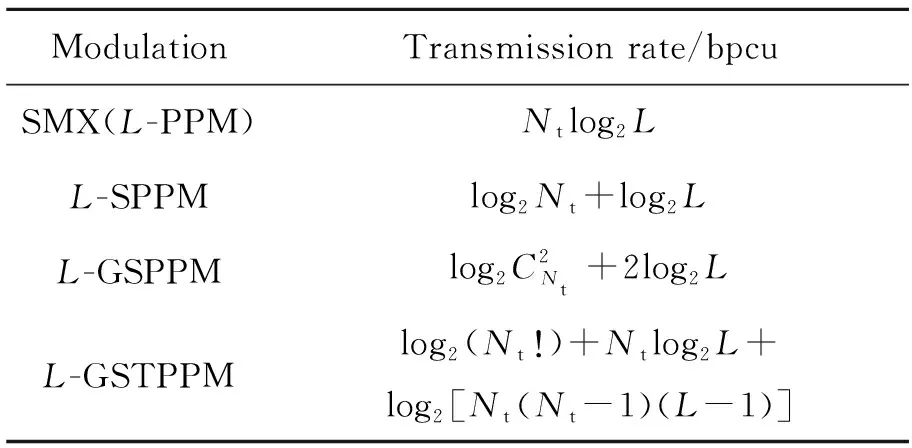
表3 不同光空間調制系統的傳輸速率
為了較為全面地評價GSTPPM系統的性能,表3給出了GSTPPM與傳統SMX,SPPM和GSPPM系統的傳輸速率對比。
由表3中傳輸速率公式可知,各系統傳輸速率均由激光器數目和調制階數決定。當Nt和調制階數固定時,GSTPPM系統的傳輸速率最高,SPPM系統的傳輸速率最低,SMX和GSPPM系統的傳輸速率介于GSTPPM和SPPM二者之間。
圖6為GSTPPM與SMX,SPPM,GSPPM系統的誤碼性能比較。由圖6可知:在激光器數目和調制階數相同的情況下,雖然(2,4,4)-GSTPPM系統的誤碼率略高于(2,4,4)-SMX和(2,4,4)-SPPM,但其傳輸速率比它們分別提高了3 bpcu和4 bpcu。(2,4,4)-GSTPPM系統的誤碼率明顯優于(4,4,4)-GSPPM系統。當BER=10-3時,前者的信噪比比后者改善了約4 dB,傳輸速率提高了1 bpcu,且前者所需的激光器數目為后者的1/2。在傳輸速率相同的情況下,(2,4,4)-GSTPPM系統的誤碼率明顯優于(32,4,4)-SPPM和(5,4,4)-GSPPM系統。當BER=10-3時,相比SPPM和GSPPM,GSTPPM的信噪比分別改善了約7 dB和5.5 dB,所需的激光器數目分別減少了30個和3個。
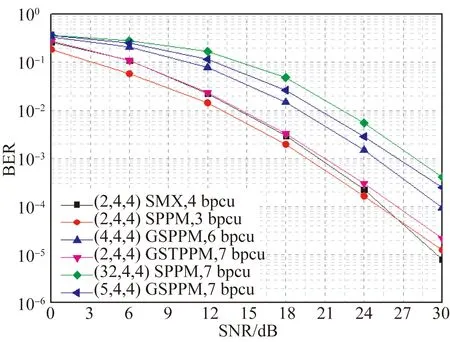
圖6 不同光空間調制系統的性能
5 結 論
針對無線光通信系統對更高傳輸速率和更優通信質量的要求,本文將線性彌散碼引入光空間調制,通過充分利用空間和時間資源,提出了一種GSTPPM方案。研究結果表明,GSTPPM方案不僅提高了系統的傳輸速率,而且節省了激光器的數目,降低了系統建設成本。在傳輸速率相同的情況下,(2,4,4)-GSTPPM系統的誤碼率明顯優于(32,4,4)-SPPM和(5,4,4)-GSPPM系統,且GSTPPM所需的激光器數目更少。這就說明在保證高傳輸速率的條件下,GSTPPM系統比SPPM和GSPPM系統在誤碼率和激光器利用率上更具優勢。特別地,在不增加成本的條件下,采用高階數字調制不僅可以提高系統的傳輸速率,還可以降低系統的誤碼率。另外,在接收端本系統采用了球形譯碼算法,在降低譯碼復雜度的同時也保證了譯碼性能較優,可進一步推進所提方案在實際中的應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
