基于電流斜率的SRM功率變換器故障診斷
2020-12-17 13:24:22王熔基劉勇智管振水
空軍工程大學(xué)學(xué)報(bào) 2020年5期
王熔基,劉勇智,管振水
(1.空軍工程大學(xué)研究生院,西安,710051;2.空軍工程大學(xué)航空工程學(xué)院,西安,710038;3.93705部隊(duì),河北遵化,064200)
開(kāi)關(guān)磁阻電機(jī)(switched reluctance motor, SRM)以其結(jié)構(gòu)簡(jiǎn)單、適合高速運(yùn)行和良好的容錯(cuò)性能等優(yōu)勢(shì),在電/混動(dòng)汽車、多/全電飛機(jī)以及家用電器等諸多領(lǐng)域得到了越來(lái)越廣泛的關(guān)注[1-3]。然而,由于電機(jī)長(zhǎng)時(shí)間在高溫、高振動(dòng)等惡劣環(huán)境下工作,驅(qū)動(dòng)系統(tǒng)可能發(fā)生多種故障[4-5]。若不及時(shí)處理,部分故障會(huì)蔓延到其他健康器件使得系統(tǒng)無(wú)法工作。尤其對(duì)于安全關(guān)鍵系統(tǒng),微小故障也會(huì)導(dǎo)致大量的人員、財(cái)產(chǎn)損失[6]。
在SRM系統(tǒng)中,功率變換器是為電機(jī)提供電能的中心樞紐,同時(shí)也是故障率最高、可靠性最薄弱的環(huán)節(jié)[7]。提高功率變換器的可靠性對(duì)于提升SRM系統(tǒng)容錯(cuò)性能具有重要意義,而準(zhǔn)確地識(shí)別故障類型以及對(duì)故障進(jìn)行精準(zhǔn)定位是進(jìn)行容錯(cuò)控制的首要條件[8]。因此,對(duì)SRM功率變換器進(jìn)行在線故障診斷很有必要。
目前功率變換器的故障診斷方法較多,主要有頻譜分析[9-11]、小波包分析[12]、電流電壓分布[13-16]以及驅(qū)動(dòng)信號(hào)輔助判別[17-19]等方法。目前,對(duì)于同相開(kāi)關(guān)管發(fā)生開(kāi)路故障的準(zhǔn)確定位,一般認(rèn)為故障相開(kāi)路后該相停止工作,在線故障定位的意義不大,因此鮮有研究。但對(duì)于具有特殊容錯(cuò)拓?fù)浣Y(jié)構(gòu)的功率變換器而言,如文獻(xiàn)[20],準(zhǔn)確的開(kāi)路故障定位是進(jìn)行在線容錯(cuò)、重構(gòu)拓?fù)浣Y(jié)構(gòu)的先決條件。對(duì)于安全關(guān)鍵系統(tǒng),開(kāi)路故障定位對(duì)系統(tǒng)及時(shí)更換故障器件、減少停機(jī)時(shí)間也很有意義。
1 ABS功率變換器及其工作模式
ASB功率變換器主電路的拓?fù)浣Y(jié)構(gòu)如圖1所示。每相橋臂由2個(gè)開(kāi)關(guān)管和2個(gè)續(xù)流二極管組成,ASB結(jié)構(gòu)保證了電機(jī)各相繞組可獨(dú)立工作而不相互影響。每相繞組有3種工作狀態(tài):勵(lì)磁、續(xù)流及退磁,分別如圖2所示。
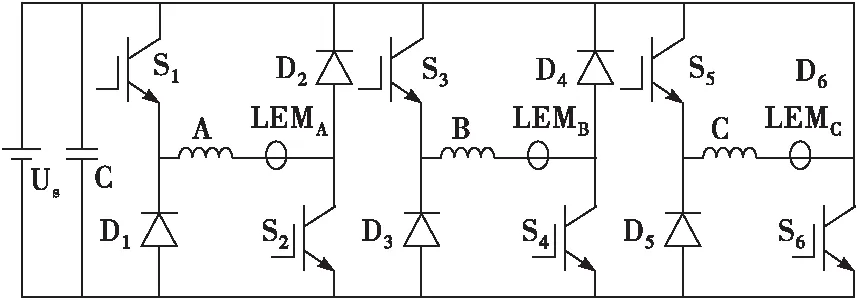
圖1 ASB功率變換器拓?fù)浣Y(jié)構(gòu)
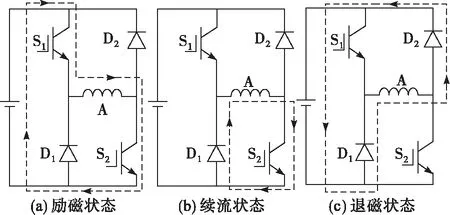
圖2 A相工作狀態(tài)
如圖2所示,當(dāng)兩開(kāi)關(guān)管均閉合時(shí),繞組受正向電源電壓作用,進(jìn)入勵(lì)磁狀態(tài);當(dāng)S1斷開(kāi),S2閉合時(shí),繞組經(jīng)S2和D1構(gòu)成零電壓續(xù)流回路,進(jìn)入續(xù)流狀態(tài);當(dāng)雙管均關(guān)斷時(shí),繞組承受反向電源電壓作用,相電流將迅速下降至抑制轉(zhuǎn)矩脈動(dòng),提高系統(tǒng)效率,各相均使用軟開(kāi)關(guān)式斬波方式:以A相為例,導(dǎo)通區(qū)間內(nèi)的S2在位置信號(hào)控制下保持開(kāi)通,S1受斬波信號(hào)調(diào)制,以實(shí)現(xiàn)勵(lì)磁狀態(tài)和零電壓續(xù)流狀態(tài)的不斷切換。可見(jiàn)兩開(kāi)關(guān)管是各相狀態(tài)轉(zhuǎn)換、保證各相正常工作的核心部件,同時(shí)在高頻工作狀態(tài)下也極易發(fā)生損壞。
2 故障診斷方案
2.1 改進(jìn)的電流傳感器檢測(cè)位置
準(zhǔn)確的相電流檢測(cè)是系統(tǒng)進(jìn)行反饋控制的必要條件。傳統(tǒng)的各相電流傳感器的檢測(cè)位置如圖3(a)所示。該檢測(cè)方案不利于故障特征的提取以及定位,尤其是對(duì)于開(kāi)路故障的定位,上下開(kāi)關(guān)管開(kāi)路時(shí)所檢測(cè)到的故障電流完全相同。為了在保證不影響系統(tǒng)正常工作的前提下,進(jìn)一步提取明顯的故障特征,改進(jìn)檢測(cè)位置如圖3(b)所示。
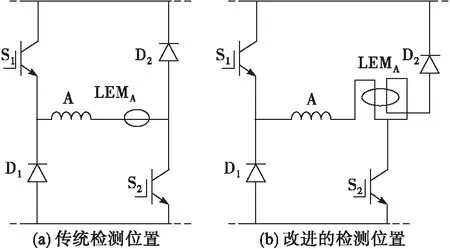
圖3 電流傳感器檢測(cè)位置
圖中LEMA為A相電流傳感器,在新的檢測(cè)位置,通過(guò)改變電流傳感器中測(cè)量導(dǎo)線的繞線方向,使得A相電流檢測(cè)值iam為A相繞組電流ia和上續(xù)流二極管D2電流iD2之和,即:
iam=ia+iD2
(1)
開(kāi)關(guān)管的邏輯信號(hào)定義為:
(2)
式中:SSk為開(kāi)關(guān)管Sk的邏輯信號(hào)。則A相電流檢測(cè)值iam可以寫成:
iam=(2-SS2)iA
(3)
本文以實(shí)驗(yàn)室550 W三相6/4極開(kāi)關(guān)磁阻樣機(jī)為仿真對(duì)象,設(shè)定各相開(kāi)通角θon=0°,關(guān)斷角θoff=29°,參考轉(zhuǎn)速nref=500 r/min,負(fù)載轉(zhuǎn)矩Tload=2 N·m,圖4為重新配置各相電流傳感器后,功率變換器在健康狀態(tài)下的仿真結(jié)果,其中n為電機(jī)的實(shí)時(shí)轉(zhuǎn)速,可知電機(jī)穩(wěn)定后在參考轉(zhuǎn)速下運(yùn)行,證明了電流傳感器配置方案的有效性。
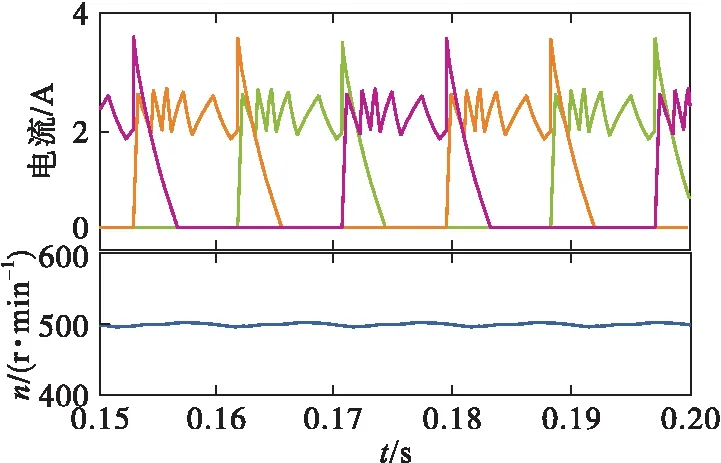
圖4 電機(jī)正常工作仿真波形
圖4中的電流尖峰是在各相關(guān)斷瞬間,電流瞬間涌入上續(xù)流二極管,由式(5)可知,檢測(cè)電流iam瞬間變?yōu)?倍的ia所導(dǎo)致。在導(dǎo)通區(qū)間內(nèi),D2中無(wú)電流,iam和相ia相等,以iam作為系統(tǒng)的反饋電流可保證系統(tǒng)的正常運(yùn)行。
2.2 開(kāi)關(guān)管開(kāi)路故障
改變傳感器檢測(cè)位置后,位置導(dǎo)通管S2在開(kāi)通過(guò)程中發(fā)生開(kāi)路故障的仿真波形如圖5所示,“×”表示仿真設(shè)置的故障發(fā)生時(shí)刻。S2開(kāi)路瞬間,ia將立即在由S1和D2形成的回路中進(jìn)行續(xù)流,電流涌入D2后導(dǎo)致iam提前跳變?yōu)?倍ia,斜率p的尖峰出現(xiàn)在導(dǎo)通區(qū)間內(nèi),iam在反向旋轉(zhuǎn)電動(dòng)勢(shì)作用下緩慢下降。進(jìn)入關(guān)斷區(qū)間后,在SS2下降沿時(shí)刻,由于D2中已有電流,iam不再發(fā)生瞬變,p在該時(shí)刻并不出現(xiàn)尖峰,故障特征明顯。
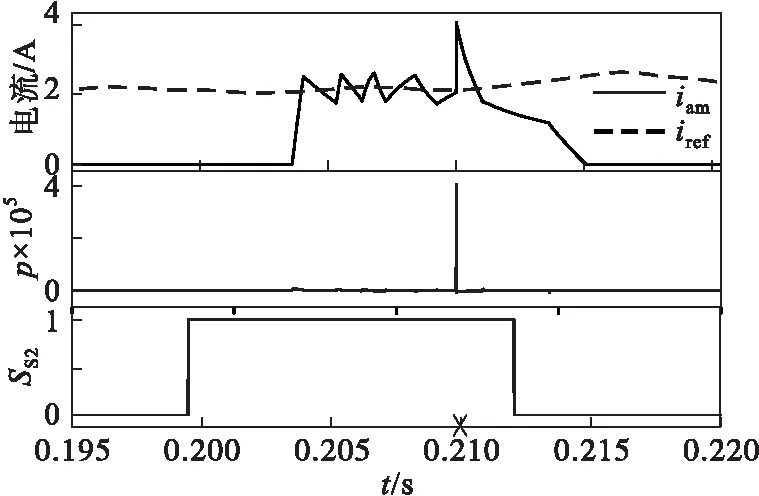
圖5 S2開(kāi)路故障仿真波形
斬波管S1發(fā)生開(kāi)路故障前后的仿真波形如圖6所示。
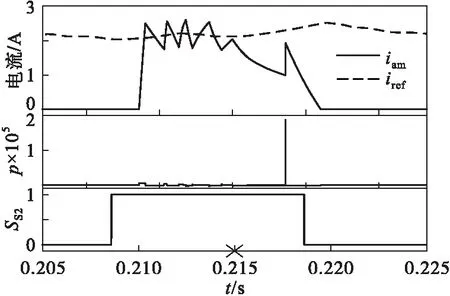
圖6 S1開(kāi)路故障仿真波形
S1開(kāi)路瞬間,ia將在由S2和D1形成的回路中進(jìn)行續(xù)流,并不流經(jīng)D2。因此導(dǎo)通區(qū)間內(nèi),iam和ia保持一致,不發(fā)生跳變,斜率p不產(chǎn)生尖峰。進(jìn)入關(guān)斷區(qū)間后,在SS2下降沿時(shí)刻,ia流向D2,iam瞬間變?yōu)?倍ia,p出現(xiàn)尖峰,和正常狀態(tài)下相同。
為進(jìn)一步提取故障特征,取變量λ1為:
(4)
式中:sgn()為符號(hào)函數(shù);Pthreshold為電流斜率閾值。

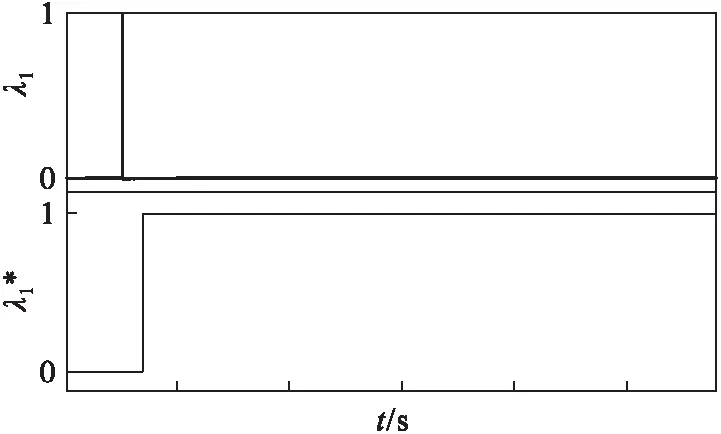
圖觸發(fā)規(guī)則f1示意圖
2.3 開(kāi)關(guān)管短路故障
圖8是S1短路前后的仿真波形。S1短路后,在導(dǎo)通區(qū)間內(nèi),S1和S2均處于導(dǎo)通狀態(tài),ia不受斬波控制的限制,在US的直接作用下迅速上升,大于參考電流。SS1的下降沿時(shí)刻,ia流向D2,導(dǎo)致iam發(fā)生跳變,p出現(xiàn)尖峰。在關(guān)斷區(qū)間,S1和D2形成零電壓續(xù)流回路,繞組在電感下降區(qū)受旋轉(zhuǎn)電動(dòng)勢(shì)作用,導(dǎo)致iam不斷上升。就斜率p的尖峰出現(xiàn)的時(shí)刻而言,S1短路和系統(tǒng)正常狀態(tài)下相同。
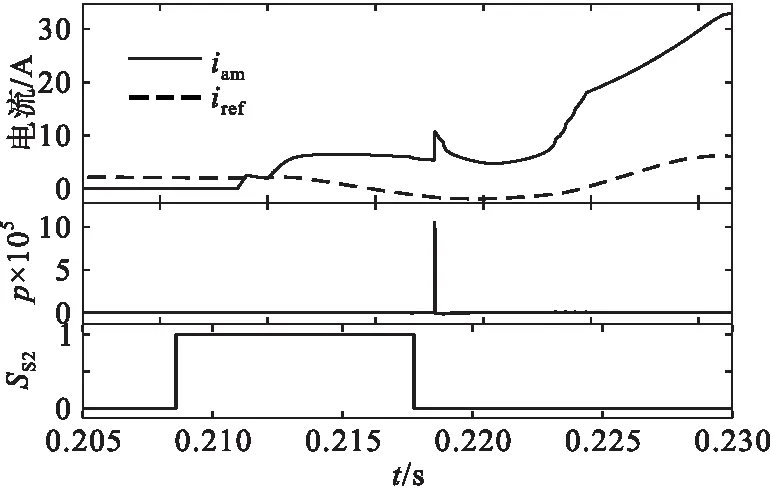
圖8 S1短路故障仿真波形
S2發(fā)生短路前后的仿真波形如圖9所示。
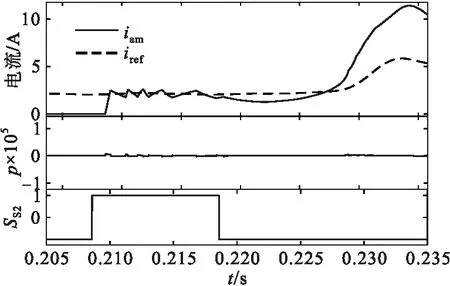
圖9 S2短路故障仿真波形
在導(dǎo)通區(qū)間內(nèi),S1仍受到斬波信號(hào)調(diào)制,相電流和健康狀態(tài)保持一致,無(wú)故障特征。關(guān)斷區(qū)間內(nèi),退磁通路將會(huì)被由D1和S2形成的續(xù)流回路所代替,無(wú)法實(shí)現(xiàn)快速退磁,且同樣受到正向的旋轉(zhuǎn)電動(dòng)勢(shì)作用,導(dǎo)致iam上升。由于關(guān)斷區(qū)間內(nèi)的零電壓續(xù)流回路由S2和D1組成,始終無(wú)電流流經(jīng)D2,因此,SS2下降沿時(shí)刻的p不會(huì)像正常工作時(shí)發(fā)生跳變。
為進(jìn)一步提取故障特征,取變量λ2為:
(5)

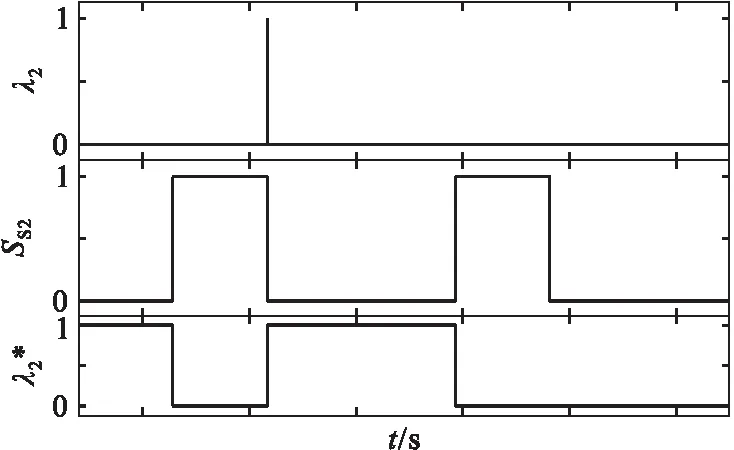
圖觸發(fā)規(guī)則f2示意圖
2.4 故障特征建模
當(dāng)開(kāi)關(guān)管開(kāi)路,相電流不可避免地下降為0,故障相停止工作,因此開(kāi)路故障的最明顯故障特征為相電流在導(dǎo)通區(qū)間內(nèi)為0。因此,以A相為例,開(kāi)路故障變量Fopen可定義為:
Fopen=[sgn(iam)⊕SS2]SS2
(6)

(7)

由SRM運(yùn)行原理可知,某一相的電流在其前一相的單獨(dú)導(dǎo)通區(qū)間內(nèi)必為0,如在三相電機(jī)中,當(dāng)C相單獨(dú)導(dǎo)通時(shí),ia必為0。因此短路故障最明顯的故障特征為故障相的電流在其前一相的單獨(dú)導(dǎo)通區(qū)間內(nèi)不為0。以A相為例,短路故障變量Fshort可定義為
(8)
(9)

綜上分析,聯(lián)立式(4)~(9)可得到故障變量F的數(shù)學(xué)模型為式(10)所示。通過(guò)故障變量F的輸出即可判斷故障類型并定位故障器件,對(duì)應(yīng)關(guān)系見(jiàn)表1。

表1 故障變量F與各故障器件的對(duì)應(yīng)關(guān)系表
(10)
3 實(shí)驗(yàn)驗(yàn)證
3.1 實(shí)驗(yàn)平臺(tái)介紹
本文利用一臺(tái)額定功率為550 W的三相6/4結(jié)構(gòu)的開(kāi)關(guān)磁阻樣機(jī)對(duì)所提方案進(jìn)行實(shí)驗(yàn)驗(yàn)證。圖11為實(shí)驗(yàn)裝置結(jié)構(gòu)框圖,按照所提出的電流檢測(cè)方案在指定位置安裝了3個(gè)額定電流為100 A的LA-100P霍爾效應(yīng)電流傳感器,并采用16位的A/D轉(zhuǎn)換芯片AD7606進(jìn)行電流采樣;為便于觀測(cè),檢測(cè)電流、故障變量等輸出信號(hào)使用TLC5615進(jìn)行D/A轉(zhuǎn)換;位置傳感器采用分辨率為1 000脈沖/轉(zhuǎn)的增量式旋轉(zhuǎn)編碼器E6B2-CWZ6C;控制系統(tǒng)以TMS320-F28335為核心并輔以必要的高速邏輯電路,外加驅(qū)動(dòng)電路,以實(shí)現(xiàn)基于CCC系統(tǒng)的模糊PI轉(zhuǎn)速閉環(huán)控制和故障診斷功能,控制系統(tǒng)框圖如圖12所示。ASB功率變換器中的主開(kāi)關(guān)采用FQA160N08型的金屬氧化物半導(dǎo)體場(chǎng)效應(yīng)管,并通過(guò)外部繼電器來(lái)人為控制各開(kāi)關(guān)管的驅(qū)動(dòng)信號(hào),從而實(shí)現(xiàn)故障模擬。以電機(jī)定、轉(zhuǎn)子不對(duì)齊位置的中點(diǎn)為各相轉(zhuǎn)子位置的參考零點(diǎn),并設(shè)定電機(jī)開(kāi)通角θon=0°,關(guān)斷角θoff=28°。由于各相診斷方案相同且相互獨(dú)立,實(shí)驗(yàn)以A相為例進(jìn)行分析。
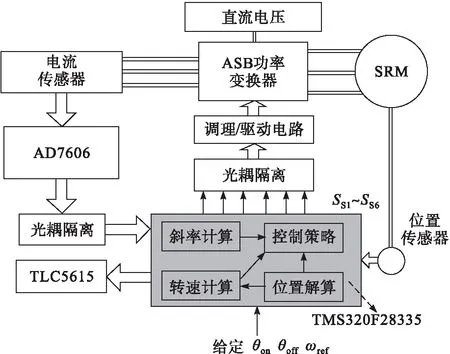
圖11 實(shí)驗(yàn)結(jié)構(gòu)框圖

圖12 控制系統(tǒng)框圖
3.2 正常工作狀態(tài)
電機(jī)的起動(dòng)負(fù)載設(shè)置為2 N·m,起動(dòng)轉(zhuǎn)速設(shè)置為500 r/min,在正常工作狀態(tài)下,三相解算電流波形及故障變量F如圖13區(qū)域Ⅰ所示。運(yùn)行穩(wěn)定后設(shè)置轉(zhuǎn)速突變?yōu)?00 r/min,電流變化如圖13區(qū)域Ⅱ所示。轉(zhuǎn)速穩(wěn)定后設(shè)置負(fù)載突變?yōu)? N·m,電流變化如圖13區(qū)域Ⅲ所示。圖13中電流波形中的尖峰為各相關(guān)斷瞬間檢測(cè)電流瞬變?yōu)槔@組電流的2倍導(dǎo)致,運(yùn)行過(guò)程中故障變量F始終為0,可知其未因轉(zhuǎn)速、負(fù)載突變干擾而發(fā)生誤判,穩(wěn)定性較好。
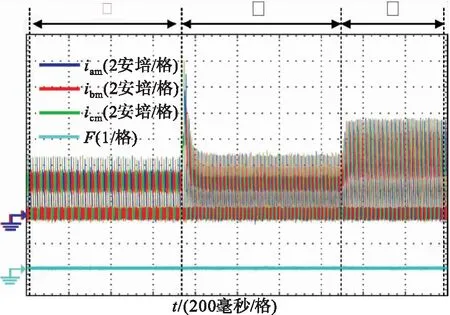
圖13 正常運(yùn)行時(shí)轉(zhuǎn)速、負(fù)載突變實(shí)驗(yàn)波形
3.3 開(kāi)關(guān)管開(kāi)路故障實(shí)驗(yàn)
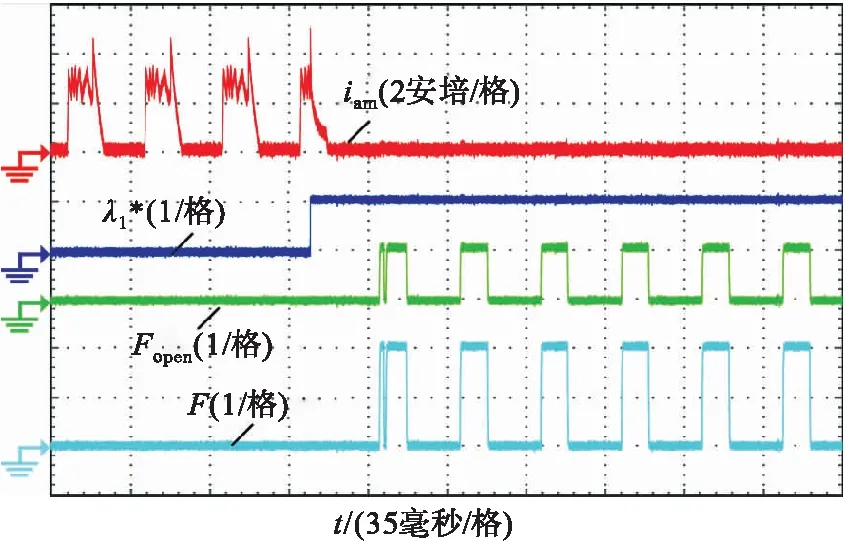
圖14 開(kāi)關(guān)管S2開(kāi)路實(shí)驗(yàn)波形
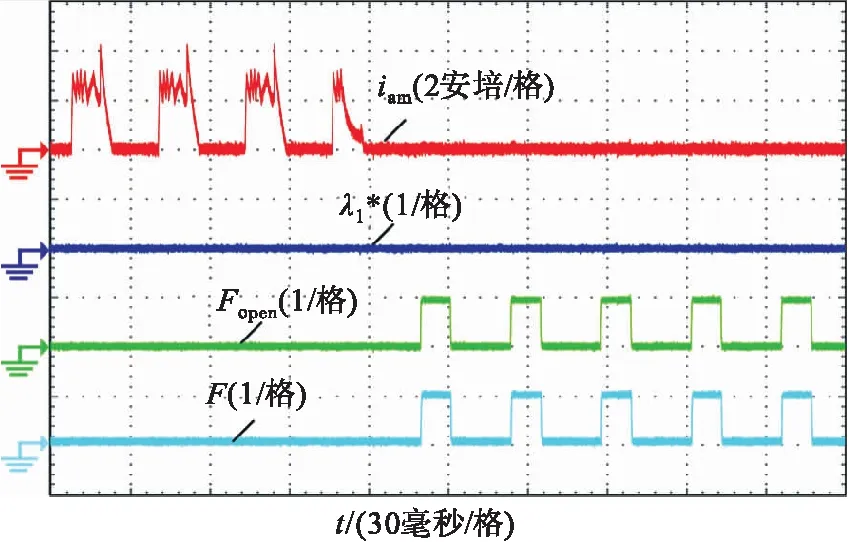
圖15 開(kāi)關(guān)管S1開(kāi)路實(shí)驗(yàn)波形
3.4 開(kāi)關(guān)管短路故障實(shí)驗(yàn)
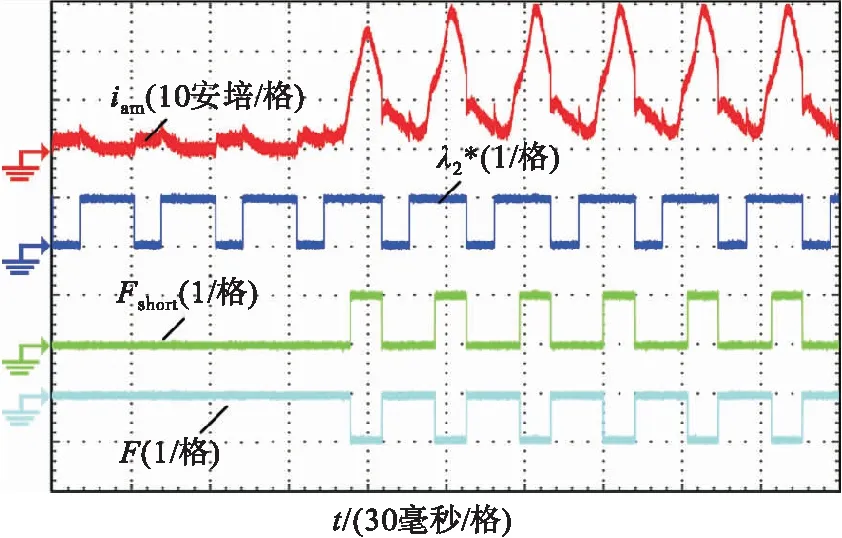
圖16 開(kāi)關(guān)管S1短路實(shí)驗(yàn)波形
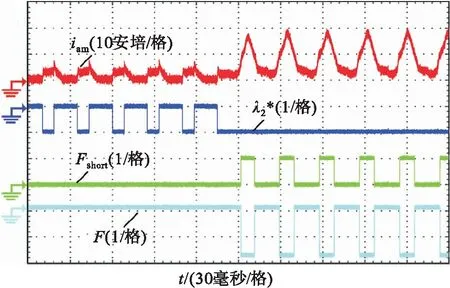
圖17 開(kāi)關(guān)管S2短路實(shí)驗(yàn)波形
實(shí)驗(yàn)結(jié)果表明,改進(jìn)的電流傳感器檢測(cè)位置可保證系統(tǒng)的正常工作,且開(kāi)關(guān)管S1和S2開(kāi)路、短路故障特征明顯,實(shí)驗(yàn)結(jié)果與理論、仿真分析保持一致,通過(guò)故障變量F指示即可判斷4種故障類型。因選取電流瞬變時(shí)的斜率尖峰作為故障特征,而外界負(fù)載轉(zhuǎn)矩變化以及電機(jī)開(kāi)通角度變化等因素均不會(huì)使電流發(fā)生瞬間跳變,方案抗干擾性較強(qiáng)。
4 結(jié)語(yǔ)
1)改進(jìn)的電流傳感器檢測(cè)位置,可保證系統(tǒng)的正常運(yùn)行。
2)方案對(duì)各相不同開(kāi)關(guān)管開(kāi)路、短路等4種故障均可進(jìn)行類型識(shí)別和準(zhǔn)確定位,故障診斷功能豐富。
3)由電流斜率和邏輯信號(hào)所決定的故障變量F對(duì)負(fù)載轉(zhuǎn)矩和電機(jī)轉(zhuǎn)速具有較好的魯棒性。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50