
基于ROS操作系統的機器人路徑規劃仿真
2020-12-14 04:08:57劉慶鄧杰銘張棚
科學與財富 2020年30期
劉慶 鄧杰銘 張棚
摘 要:當今社會,機器人和無人駕駛技術的快速發展,機器人已經應用于各個行業中,路徑規劃作為該領域的研究問題之一,具有重要的理論研究意義和實踐應用價值。本文分析了ROS操作系統的構成,基于ROS操作系統上分析了路徑規劃的分類以及不同的路徑規劃算法,實現在不同場景設定初始節點和目標節點,運用A*算法以及動態窗口算法,對移動機器人的運動軌跡進行路徑規劃仿真,根據兩種路徑規劃算法的實現過程,得到仿真實驗結果。
關鍵詞:ROS 路徑規劃 A*算法 動態窗口算法
1引言
目前,工信和信息化部、國家發展改革委、財政部等三部委聯合印發了《機器人產業發展規劃(2016-2020年)》,為我國機器人產業發展描繪了清晰的藍圖,構建智能制造為根本特征的新型移動機器人,相比于傳統移動機器人只能在事先設定好的程序和熟悉的環境中進行機械性動作,新型移動機器人具有自主規劃路徑、自主導航、自主避障的智能機器人。
移動機器人在各行業中的應用環境的不同,面臨不同的運動軌跡和突發問題,這急需提高移動機器人的應用性能。未來,無人駕駛汽車、巡檢機器人等設備的發展都需要使用機器人的路徑規劃與自主導航功能,因此,移動機器人的路徑規劃能力至關重要[1]。為實現移動機器人的路徑規劃,采用基于ROS操作系統的路徑規劃算法制定最優路徑。
2 ROS操作系統簡介
ROS是一個適用于機器人的開源的元操作系統,它提供了操作系統應有的服務,主要目標是為機器人研究和開發提供代碼復用的支持。
ROS是將原本松散的零部件耦合在一起,這些零部件稱為節點,每個節點獨立運行,與其他節點相互通信。ROS提供了大量的功能包,開發者可以直接調用包含所需節點的包,ROS支持多語言開發,不同的節點可以使用不同的語言開發,這種具有獨立性和開源型的模塊化開發設計提高了共享性和開發效率[2]。ROS是通訊機制、工具軟件包、機器人高層技能以及機器人生態系統的集合。
3移動機器人仿真設計
3.1仿真系統架構
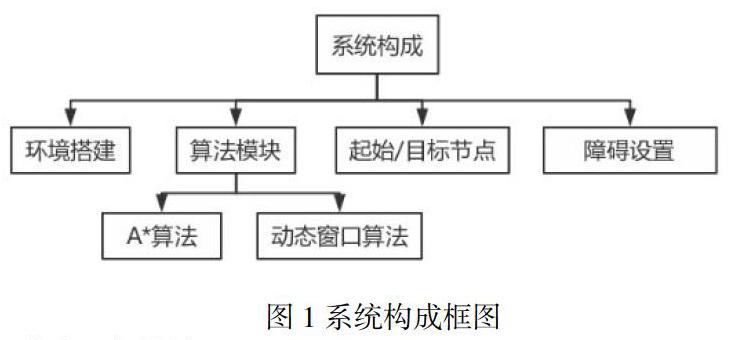
采用模塊化設計可提高系統利用率,將仿真系統分為環境搭建、算法模塊、起始/目標節點、障礙設置四大模塊,系統構成如圖1所示。
3.2仿真目標設計
(1)搭建界面友好的仿真環境,將界面設計的美觀且人性化、展現的與真實場景相似。
(2)界面可以在移動機器人能到達的場景范圍內變換場景設施、障礙設置。
(3)可隨意設置移動機器人的起始節點位置以及目標節點位置。
(4)根據不同的路徑規劃算法使機器人運動,比較不同算法之間的優缺點。
3.3系統仿真平臺
在Ubuntu20.0環境下搭建的ROS操作系統為移動機器人提供了一系列的控制器接口、傳感器接口、工具箱等,所提供的功能包提高機器人開發效率。使用Gazebo作為系統仿真軟件,需要在Gazebo中配置移動機器人模型、創建不同仿真環境。
4路徑規劃算法的實現
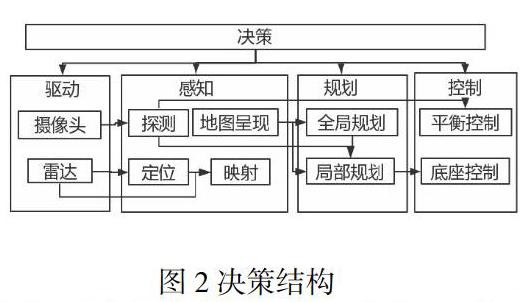
路徑規劃是移動機器人運動的最基本環節,主要包括感知、決策、控制,一般的路徑規劃指的是決策部分,如圖4所示。在有障礙物的運動環境中,找到一條從起點到終點的最優運動路徑,機器人在運動過程中能無碰撞、安全的繞過所有障礙物,機器人需要對靜態和動態環境做出綜合判斷,并規劃出最優路徑。
在仿真環境中采用A*算法、動態窗口算法[3]對移動機器人的運動路徑模擬,實現移動機器人的路徑規劃仿真。
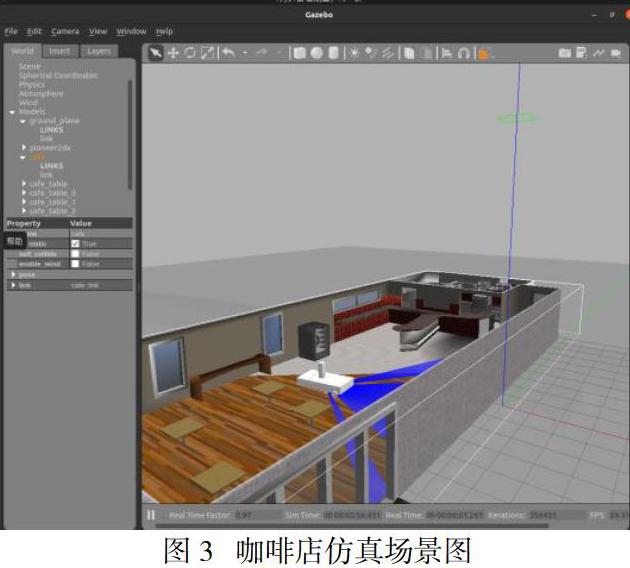
首先在Gazebo軟件中模擬真實場景,給定移動機器人的初始節點和目標節點,A*算法在地圖中搜索節點信息[4],根據下一節點到目標節點的距離做出估價,得到目前節點的最有路徑的可能性,快速搜索出可能性最大的路徑。
相比于A*算法的搜索啟發式路徑規劃,動態窗口算法是對移動機器人的行駛軌跡、模型速度采樣,由此得到不同運動速度,根據每條軌跡的不同角度差、最短距離以及當前速度分別對每條路徑進行評價[5]。
5實驗仿真及結論
本實驗仿真系統在虛擬機上運行,使用Linux操作系統,采用Gazebo作為開發平臺,移動機器人的路徑規劃驗證結果都在仿真平臺上實現。
使用A*算法和動態窗口算法分別實現移動機器人的路徑規劃,并且機器人在不同的場景使用不同的算法,如圖3所示。
由仿真實驗可以得到在不同場景中使用不同算法,移動機器人的運動軌跡不同,根據初始節點與目標節點的設定,機器人能夠成功避開設定障礙,找到最優路徑,實現達到目標位置。結果表明,A*算法適用于靜態搜索路徑,環境一旦變化,則需重新開始規劃節點到目標節點路徑,相對于A*算法,動態窗口算法適用于局部路徑規劃,將全局路徑進行局部路徑規劃,直到到達目標點。
6結語
(1)本文主要對基于ROS操作系統的移動機器人的路徑規劃的場景仿真,采用不同路徑規劃算法,找到機器人運動的最優路徑,得到安全、穩定的避障路徑,完成動態實驗。
(2)仿真A*算法與動態窗口算法的路徑規劃。通過仿真可以看出兩種算法的區別,并驗證了兩種算法的適用情況以及優缺點,完成移動機器人在不同場景、不同算法的路徑規劃。
參考文獻:
[1]李賀喜,李富強,牛童立,李康,杜邊境.基于ROS系統移動機器人SLAM算法的研究與實現[J].技術與市場,2020,27(07):97+99.
[2]吳夢珂,任工昌,劉朋.基于ROS的移動機器人多目標點導航的實現[J].電子技術,2018,47(07):26-29+22.
[3]孫章軍,田海晏,鄧雙成,孫晨.移動機器人路徑規劃仿真平臺設計[J].北京石油化工學院學報,2006(03):16-19.
[4]霍鳳財,遲金,黃梓健,任璐,孫勤江,陳建玲.移動機器人路徑規劃算法綜述[J].吉林大學學報(信息科學版),2018,36(06):639-647.
[5]何壯壯,丁德銳.基于D-star和DWA的改進機器人導航方法[J].電子測量技術,2019,42(12):122-128.
作者簡介:
劉慶 ,女 , 重慶郵電大學 工業物聯網與網絡化控制教育部重點實驗室? 在讀研究生 研究方向:物聯網技術與應用
基金:重慶市教委雛鷹計劃第九期研究項目“基于Hadoop智能家居管理軟件的研究與設計”(編號:CY200609)
