LKA系統控制策略研究
2020-12-09 05:40:55辛乾蘆凡楊航
汽車實用技術 2020年21期
辛乾 蘆凡 楊航

摘 要:首先完成了LKAS控制系統邏輯架構的構建,同時針對汽車側向動力學的強非線性及參數時變特性,利用預瞄控制原理設計了轉向控制算法,應用在車輛的車道保持控制系統中。通過Trucksim和Matlab聯合仿真的初步驗證,該算法能夠實現不同車速下對車輛的良好循跡控制。
關鍵詞:車道保持;聯合仿真;預瞄控制
中圖分類號:U462 ?文獻標識碼:A ?文章編號:1671-7988(2020)21-95-03
Abstract: Firstly, the logic architecture of LKAS control system is constructed. At the same time, aiming at the strong nonlinearity and time-varying characteristics of vehicle lateral dynamics. Based on the preview control principle, a steering control algorithm is designed and applied to the lane keeping control system of vehicle. Through the preliminary verification of the joint simulation of Trucksim and Matlab, the algorithm can realize good tracking control for vehicles at different speeds.
Keywords: Lane Keeping Assistance System; Co-simulation; Preview control
CLC NO.: U462 ?Document Code: A ?Article ID: 1671-7988(2020)21-95-03
前言
隨著我國駕駛員數量和機動車保有量的迅速增加,因交通事故傷亡的人數也呈現上升趨勢。歐美等發達國家曾對交通事故進行調查發現在已發生的交通事故中約80%的事故與駕駛員有關,其中由于駕駛員注意力不集中造成的交通事故占有很大比重[1]。美國國家公路交通安全管理局統計結果表明:約30%的交通事故由車輛追尾引發,約20%的交通事故由車輛駛出預定車道造成[2]。2008 年美國聯邦公路局統計在重大交通事故中近50%與車輛駛出原車道有關[3]。
美國聯邦公路局相關調查結果顯示安裝LDWS可把由車輛偏離車道引發交通事故的概率降低30%~70%[4]。故LKAS的開發對于提升車輛安全性意義重大。
1 設計目標
本策略用于車輛駕駛輔助中的車道保持系統(LKAS),該系統幫助駕駛員將車輛控制到當前道路中,通過獲取車輛在道路里的位置信息等,實時監控車輛狀態,并在需要時向控制器發送命令來調節車輛的橫向位移。按照相關標準要求,該系統應能滿足60km/h以上車速正常工作的要求。
2 LKAS系統的基本架構
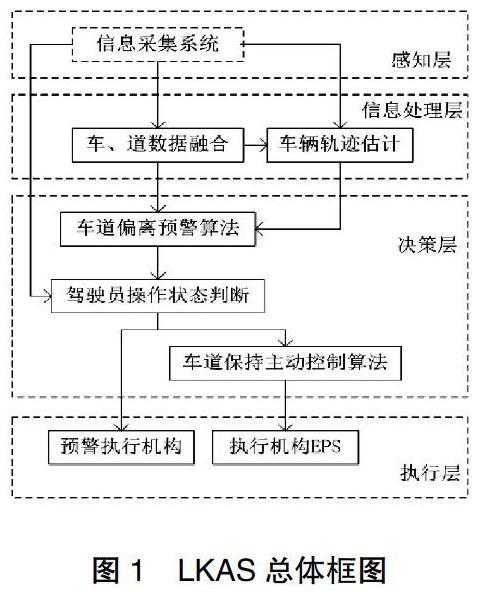
車道保持系統主要由四部分組成:感知層、信息處理層、決策層和執行層。總體結構如圖1所示:
感知層:即信息采集系統包括各種傳感器和圖像處理模塊,是LKAS車道信號和車輛狀態信號的來源;
信息處理層:接收感知層采集的各種信號并進行數據處理,得到車輛與車道線的相對位置關系,然后向決策層各模型傳遞處理后的信號;
決策層:主要由車道偏離預警算法、駕駛員操作狀態辨識算法和車道保持主動控制算法三部分組成,該層通過判斷車輛的運動狀態和獲取車輛位置信息確定是否向執行層發送命令,它決定LKAS 的工作狀態;
執行層:執行決策層的命令,利用轉向系統控制車輛運動,修正其運動軌跡使之回到原行駛車道。
3 LKAS系統控制算法
本文主要對決策層的控制算法進行討論,其主要包含以下幾個方面:
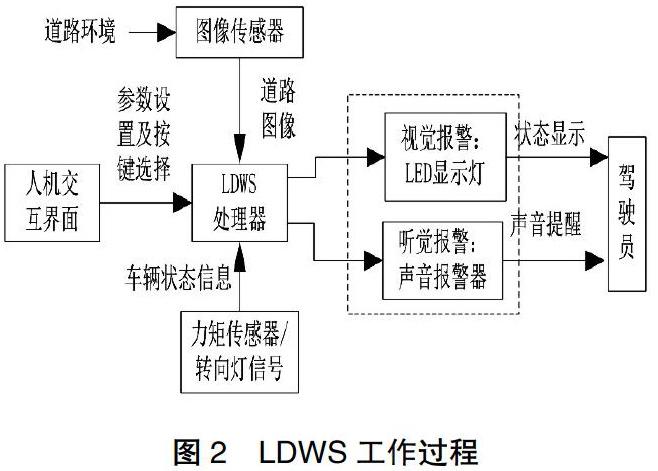
3.1 車道偏離預警
車道偏離預警工作過程如下圖:
車道偏離預警方法為基于TLC(Time To Lane Crossing)的預警算法。TLC是指從汽車當前位置開始到汽車與車道線開始接觸為止所需的運動時間。該方法基于未來特定時間內的車輛動力學模型做出有效假設,根據建立的車輛運動模型和對前方道路的正確識別,最后識別出汽車即將跨越道路邊界的時間。當時間小于某一閾值時,觸發系統進行聲光報警,提醒駕駛員。
基于TLC的算法又可以分為縱向TLC與橫向TLC,分別基于縱向距離、速度和橫向距離、速度計算TLC值,由于TLC算法將車輛運動狀態簡化的認為在未來一定時間內維持不變,而實際車輛行駛過程中的運動狀態是時刻變化的,尤其是車輛橫向運動的不穩定性更加明顯,為盡可能確保對車輛未來軌跡預測的準確性,本文采用依據縱向距離和速度的TLC計算方法。
實際的TLC計算過程中還要充分考慮道路的曲率半徑,延伸方向,實際車道線寬度,車輛軌跡的曲率半徑等時變參數,從而準確的計算出當前工況下的TLC值。
3.2 駕駛員操作狀態辨識
LKAS執行預警命令或主動控制命令前須識別駕駛員操作狀態,判斷車輛當前偏離狀態是不是駕駛員有意為之,避免人車沖突,避免影響人機友好性。駕駛員操作狀態辨識主要依據如下兩個信號,同時結合車輛狀態進行判定。具體如下:
1)轉向燈信號,當轉向燈有信號且與車輛偏離方向一致時,認為駕駛員為有意識操作,不觸發報警;
2)方向盤力,當電動助力轉向系統的力矩傳感器檢測到的方向盤力矩大于某一閾值時,認為駕駛員為有意識操作車輛,此時即使車輛偏離當前車道線行駛,也不觸發報警。
3.3 車道保持主動控制算法
在車道偏離預警啟動后,若判斷駕駛員并沒有控制車輛,控制器將主動控制車輛回到車道中心線位置。此時根據車輛質心距離車道中心線的距離,以及橫向穩定性要求,控制器將規劃出當前時刻車輛到道路中心線的路徑。控制過程中,基于路徑偏差序列生成方向盤轉角控制參數。
3.3.1 軌跡規劃
采用如下路徑算法:
上式中Y,X為規劃的軌跡坐標,dx1、dx2、dy1、dy2、z1、z2為軌跡曲線的設置參數。通過不同的參數選擇可對換道曲線的曲率半徑、橫向偏移量等進行參數化設置,根據車輛實際運行狀態及工程經驗進行設置。
3.3.2 轉向控制算法
經過合理簡化,建立車輛二自由度的單軌模型如下圖所示:
根據車輛動力學模型,為了使車輛以最小的誤差沿著期望的路徑形式,建立期望的方向盤轉角與預瞄誤差、車速、預瞄距離以及車輛基本參數的函數如下:
上式中dpreview為預瞄距離,需要根據工程經驗具體確定。
4 仿真效果
4.1 仿真模型的搭建
通過Trucksim對整車建立動力學模型,與simulink的預瞄控制算法進行聯合仿真。仿真模型搭建如下所示:
給定參考軌跡,通過控制算法使得實際軌跡較好的跟蹤參考軌跡,參考軌跡根據3.3.1中公式生成,具體的軌跡如下圖所示:
4.2 仿真結果
設定的預瞄距離根據工程經驗確定,車輛行駛速度為60km/h,各個預瞄點的權重值根據車輛的速度及預瞄距離確定,仿真結果如下所示:
5 總結與展望
1)控制策略整體滿足了LKAS的功能需求,能較準確地判斷車輛狀態,駕駛員意圖,并在必要時對轉向系統進行控制保持車輛按當前車道行駛。
2)下一步擬對對EPS系統的動態響應特性進行研究,進一步優化前輪轉角控制算法。
參考文獻
[1] 王武宏,孫逢春等.道路交通系統中駕駛行為理論與方法[M].北京: 科學出版社,2001.
[2] Pomerleau D, Jochem T, Thorpe C, et al. Run-off-road collision avoi -dance using IVHS countermeasures[J].DOT HS,1999, 809(170): 88.
[3] American Association of State Highway and Transportation Officials, Driving Down Lane-Departure Crashes: A National Priority [N]. Fatalities, 2008.
[4] Gonzalez-Mendoza M,Jammes B,Hernandez-Gress N,et al.A com -parison of road departure warning systems on real driving condi -tions[C]//Intelligent Transportation Systems,2004.Proceedings. The 7th International IEEE Conference on. 2004:349-354.
