預(yù)壓力對壓電驅(qū)動履帶移動系統(tǒng)的性能影響*
2020-12-08 02:03:46金家楣
振動、測試與診斷 2020年5期
王 亮, 陳 迪, 王 鑫, 張 泉, 金家楣
(1. 南京航空航天大學(xué)機械結(jié)構(gòu)力學(xué)及控制國家重點實驗室 南京,210016)
(2. 上海大學(xué)機電工程與自動化學(xué)院 上海,200072)
引 言
深空探測技術(shù)已成為衡量一個國家綜合國力和高端技術(shù)創(chuàng)新能力的標(biāo)桿,在提升國際影響力、保障國家國防安全等方面發(fā)揮著重要的推進(jìn)作用[1]。我國在本世紀(jì)初制定了嫦娥探月工程計劃,擬在2020年前后完成對月球開展的“繞”、“落”、“回”三步探測任務(wù),為我國進(jìn)一步開展載人登月以及在未來實施火星等外太空行星的探測進(jìn)行技術(shù)儲備[2]。美國制定了2024年前載人重返月球的計劃[3]。
在探月工程實施方案里,月面巡視器(俗稱“月球車”)扮演了重要的角色,是月面探測任務(wù)的重要載體和探測裝置[4]。2013年,我國研制并成功發(fā)射的嫦娥三號探測器所攜帶的“玉兔”一號月球車在月面上行駛的轍印是我國首次在月球上留下的足跡。2018年底,嫦娥四號探測器開啟了探月之旅并成功著落在月球背面,攜帶的“玉兔”二號月球車也成功落月,截至目前為止,“玉兔”二號月球車仍在月面上工作。雖然多功能集成化設(shè)計能夠保證月球車同時執(zhí)行多項探測任務(wù),但是功能模塊的不斷增加及其相互之間的交叉融合以及復(fù)雜的月面環(huán)境,使得月球車的可靠度保障成為一項艱巨任務(wù)。隨著傳感、人工智能技術(shù)的快速進(jìn)步,微小型群機器人系統(tǒng)成為了月面巡視器發(fā)展的新方向。
盡管輪式機構(gòu)已成為月面巡視器的主流移動系統(tǒng),但是越障能力差以及非道路機動性能受限等缺點,仍對輪式月面巡視器適應(yīng)復(fù)雜月面環(huán)境提出了嚴(yán)峻的挑戰(zhàn)[5]。履帶式機構(gòu)的設(shè)計是為了適應(yīng)崎嶇、凹凸不平的行星表面形貌,具有較強的越障能力和較高的穩(wěn)定性,但結(jié)構(gòu)復(fù)雜、機動性能差、控制系統(tǒng)冗余,距離實際應(yīng)用還有很多工作要做[6]。2000年,歐洲空間局研制了一款微小型履帶式火星探測車,可實現(xiàn)5 m/h的運行速度和0.1 m的越障高度[7]。2009年,日本宇航探測局研制了一款微小型多履帶式月面巡視器,可實現(xiàn)高機動性能[8]。2012年,美國國家航空航天局開發(fā)出了一款可在行星表面進(jìn)行勘探任務(wù)的微小型履帶車[9]。上述微小型履帶車的設(shè)計方案給微小型月面巡視器提供了新思路,但是系統(tǒng)結(jié)構(gòu)復(fù)雜、笨重、磨損嚴(yán)重、效率低和功耗大等問題仍未被徹底解決。課題組在長期研究行波型旋轉(zhuǎn)超聲電機的基礎(chǔ)上[10-13],利用超聲電機具有的環(huán)境適應(yīng)性好、結(jié)構(gòu)簡單緊湊、直接驅(qū)動無需減速機構(gòu)、斷電自鎖和快速響應(yīng)等優(yōu)點,提出了結(jié)構(gòu)功能一體化的壓電驅(qū)動履帶移動系統(tǒng)的設(shè)計思路[14-18],解決了傳統(tǒng)履帶系統(tǒng)存在的驅(qū)動輪系復(fù)雜、重量大、能耗高和磨損嚴(yán)重等問題,特別是消除了真空環(huán)境下運動副需要潤滑的問題。
利用環(huán)形結(jié)構(gòu)的面內(nèi)彎曲振動,基于環(huán)梁結(jié)構(gòu)復(fù)合形式,課題組提出了貼片式和夾心式兩種行波型壓電振子用于驅(qū)動履帶構(gòu)建移動系統(tǒng)[14-16]。4個圓環(huán)通過4根粘貼了壓電陶瓷片的直梁構(gòu)建了平行四邊形框架式壓電振子,其中4個圓環(huán)位于四邊形的4個頂點。兩相面內(nèi)彎曲模態(tài)在4個圓環(huán)上耦合出同向旋轉(zhuǎn)的行波,通過摩擦作用驅(qū)動張緊在4個圓環(huán)外表面的履帶運動[14-15]。由于利用了壓電陶瓷的d31振動特性,貼片式四環(huán)形壓電振子存在機電耦合效率低和驅(qū)動效果差等問題,導(dǎo)致構(gòu)建的履帶移動系統(tǒng)輸出性能較差,現(xiàn)階段難以滿足微小型月面巡視器的應(yīng)用需求。在此基礎(chǔ)上,課題組利用壓電陶瓷的d33振動特性設(shè)計了夾心式雙環(huán)形壓電振子,利用兩相面內(nèi)彎曲振動在2個圓環(huán)上形成同向旋轉(zhuǎn)行波,經(jīng)摩擦作用驅(qū)動履帶運動,從而構(gòu)建履帶式移動系統(tǒng)[16-18]。初步實驗結(jié)果已表明,夾心式壓電振子的驅(qū)動性能優(yōu)于貼片式壓電振子,但仍無法滿足微小型月面巡視器對移動系統(tǒng)的應(yīng)用需求。其主要原因在于夾心式壓電振子驅(qū)動的履帶移動系統(tǒng)沒有考慮預(yù)壓力對系統(tǒng)輸出性能的影響關(guān)系,兩者之間的預(yù)壓力僅靠履帶自身的張緊力,無法滿足系統(tǒng)性能提升的要求[19]。
課題組在原有夾心式壓電驅(qū)動履帶移動系統(tǒng)的基礎(chǔ)上設(shè)計了預(yù)壓力調(diào)節(jié)機構(gòu),用于調(diào)整夾心式壓電振子與履帶之間的預(yù)壓力,從而改進(jìn)履帶移動系統(tǒng)的機械輸出性能。首先,通過有限元仿真分析討論了設(shè)置有預(yù)壓力調(diào)節(jié)機構(gòu)的夾心式壓電振子的動力學(xué)特性;其次,開展了預(yù)壓力調(diào)節(jié)機構(gòu)作用下不同預(yù)壓力對夾心式壓電驅(qū)動履帶移動系統(tǒng)性能影響關(guān)系的實驗研究,并與無預(yù)壓力調(diào)節(jié)機構(gòu)的夾心式壓電驅(qū)動履帶系統(tǒng)的性能進(jìn)行了比較;最后,總結(jié)了預(yù)壓力調(diào)節(jié)機構(gòu)對夾心式壓電驅(qū)動系統(tǒng)的性能影響關(guān)系。
1 預(yù)壓力調(diào)節(jié)機構(gòu)的設(shè)計
筆者提出了一種U型預(yù)壓力調(diào)節(jié)機構(gòu),如圖1所示,具有靈活調(diào)節(jié)夾心式壓電振子與履帶之間預(yù)壓力的能力。2個半U型夾持機構(gòu)通過螺栓固定在夾心式壓電振子的連接塊中央,構(gòu)成一個完整的U型結(jié)構(gòu)。此外,半U型夾持機構(gòu)的側(cè)面設(shè)置了U型凹槽。一根在兩端設(shè)置了外螺紋的金屬桿通過2個螺帽固定在2個半U型夾持機構(gòu)的U型凹槽內(nèi),用于調(diào)節(jié)履帶與夾心式壓電振子的預(yù)壓力。其中,在金屬桿的中央固定了一個滾動軸承,以減小預(yù)壓力調(diào)節(jié)機構(gòu)對履帶移動系統(tǒng)性能的影響。

圖1 U型預(yù)壓力調(diào)節(jié)機構(gòu)示意圖Fig.1 Schematic of the U-shaped preload adjustment mechanism
圖2為安裝了預(yù)壓力調(diào)節(jié)機構(gòu)的夾心式壓電驅(qū)動履帶移動系統(tǒng)示意圖。為了降低預(yù)壓力機構(gòu)對夾心式壓電振子的振動特性影響,2個半U型夾持機構(gòu)安裝在夾心式壓電振子的連接塊中央,此處位于蘭杰文換能器的3階縱振和10階彎振的公共節(jié)點。

圖2 安裝預(yù)壓力調(diào)節(jié)機構(gòu)的夾心式壓電驅(qū)動履帶移動系統(tǒng)示意圖Fig.2 Schematic of the sandwich piezoelectric actuated tracked mobile system with the preload adjustment mechanism
2 仿真分析
為了研究U型預(yù)壓力機構(gòu)安裝在夾心式壓電振子上對其振動特性的影響關(guān)系,筆者利用有限元軟件ANSYS/Workbench對安裝有U型預(yù)壓力機構(gòu)的壓電振子進(jìn)行了仿真分析。首先,建立了2個半U型夾持機構(gòu)與夾心式壓電振子復(fù)合后的有限元模型,如圖3所示。整個復(fù)合結(jié)構(gòu)的有限元模型共有39 096個單元和67 440個節(jié)點。壓電振子與半U型夾持機構(gòu)的材料選擇如下:變截面梁和驅(qū)動圓環(huán)為磷青銅,連接塊為65Mn,5個螺栓為45鋼,半U型夾持機構(gòu)為不銹鋼,壓電陶瓷片為PZT-8型號(無錫海鷹集團,部分材料參數(shù)為d33=250 pC/N,Kp=0.31,Qm=1 500,長為12 mm,寬為8 mm,厚度為2 mm,中間設(shè)有直徑為4 mm的通孔),具體材料參數(shù)見文獻(xiàn)[17],其中,半U型夾持機構(gòu)的尺寸示意圖如圖4所示。在保證計算精度的條件下,對實際的夾心式壓電振子做了必要的簡化和假設(shè)。沒有考慮預(yù)緊螺栓施加在壓電陶瓷片上的預(yù)緊力,且假設(shè)所有零件之間的結(jié)合面都是連續(xù)的。

圖3 2個半U型夾持機構(gòu)與夾心式壓電振子復(fù)合結(jié)構(gòu)的有限元模型Fig.3 Finite element model of the composite structure of the two half-U-shaped clamping mechanisms and the sandwich piezoelectric actuator

圖4 半U型夾持機構(gòu)的尺寸示意圖(單位:mm)Fig.4 Dimensional view of the half-U-shaped clamping mechanism (unit: mm)
對4組壓電陶瓷片進(jìn)行了零電壓約束,通過模態(tài)分析計算得到了壓電振子的2個工作模態(tài)(模態(tài)A和模態(tài)B),如圖5所示。在模態(tài)A中,蘭杰文換能器呈現(xiàn)出3階縱振,2個驅(qū)動圓環(huán)呈現(xiàn)出在4階面內(nèi)彎振,并且2個半U型夾持機構(gòu)位于蘭杰文換能器3階縱振的節(jié)點位置。在模態(tài)B中,蘭杰文換能器呈現(xiàn)10階彎振,2個驅(qū)動圓環(huán)也呈現(xiàn)出4階面內(nèi)彎振(但與模態(tài)A中的4階面內(nèi)彎振在空間上存在π/2相位差),同樣2個半U型夾持機構(gòu)位于蘭杰文換能器10階彎振的中間節(jié)點位置。模態(tài)A和模態(tài)B分別對應(yīng)的共振頻率為35.122 kHz和35.529 kHz。可以看出,在計算得到的2個模態(tài)中,2個半U型夾持機構(gòu)均呈現(xiàn)出弱振動的形態(tài)。雖然2個半U型夾持機構(gòu)的安裝未改變壓電振子原有工作模態(tài)的振型,但由于附加質(zhì)量的增加以及整體結(jié)構(gòu)的改變,導(dǎo)致2個工作模態(tài)的共振頻率發(fā)生漂移,同時加大了2個工作模態(tài)的頻率差。
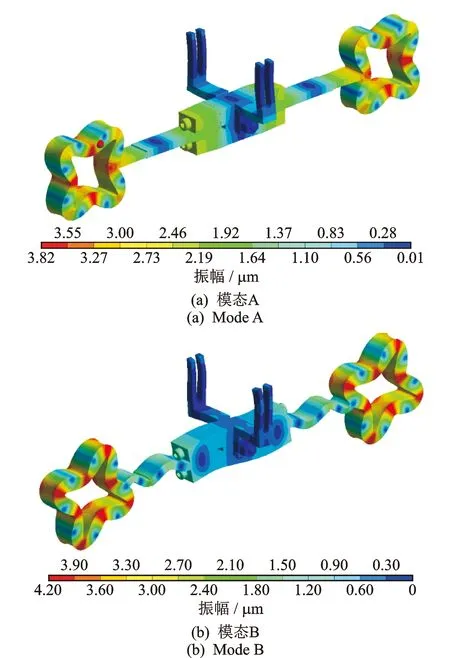
圖5 模態(tài)分析計算得到的2個工作模態(tài)Fig.5 Two operating vibration modes calculated by the modal analysis
為了進(jìn)一步研究半U型夾持機構(gòu)的安裝對夾心式壓電振子的影響特性,筆者開展了諧響應(yīng)仿真分析。選取了100 V的激勵電壓和35.35 kHz的激勵頻率,計算得到了夾心式壓電振子在一個振動周期內(nèi)的振型變化情況,如圖6所示。將夾心式壓電振子的一個振動周期分為4個階段,可以看出,在這4個階段里,一個完整的沿周向行進(jìn)的行波在夾心式壓電振子的驅(qū)動圓環(huán)上形成。此外,從夾心式壓電振子的變形云圖可以看出,2個半U型夾持機構(gòu)在一個振動周期內(nèi)始終處于微弱振動狀態(tài)。因此,2個半U型夾持機構(gòu)的安裝并未改變夾心式壓電振子的振動模態(tài)。
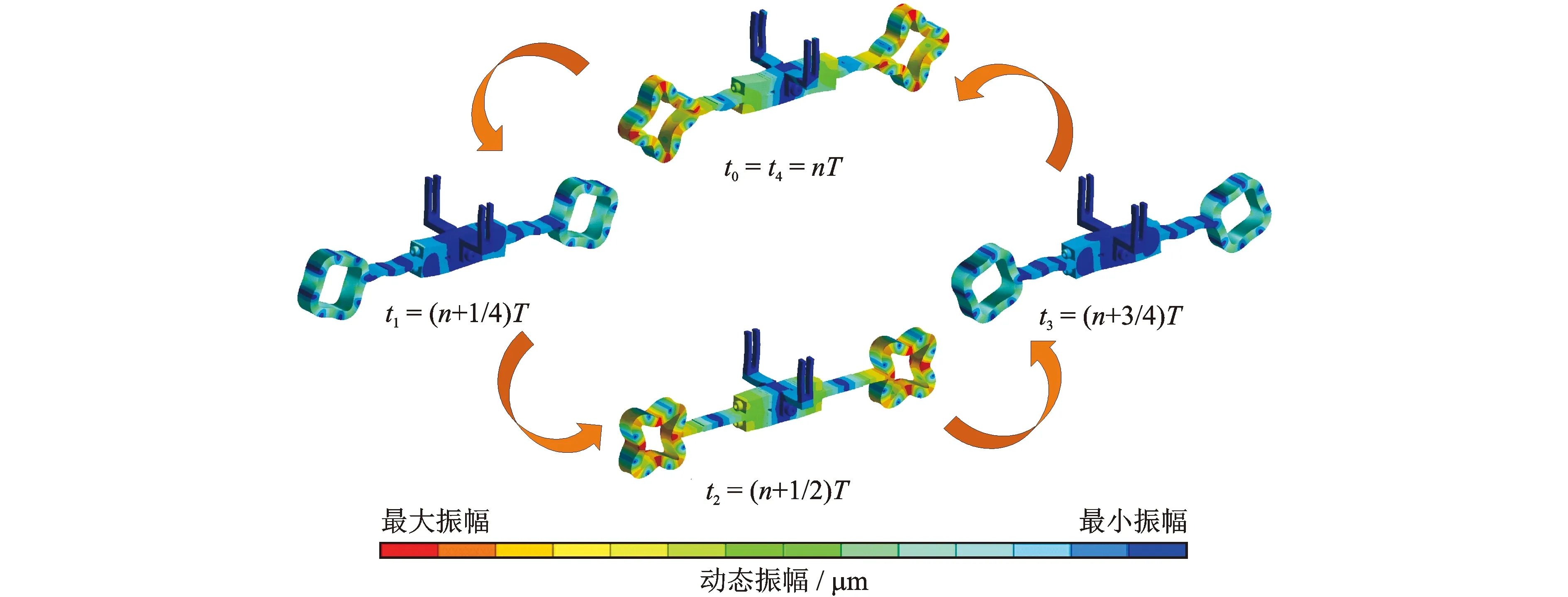
圖6 夾心式壓電振子在一個振動周期內(nèi)的振型變化情況Fig.6 Vibration shapes of the sandwich piezoelectric actuator during one vibration period
3 實驗研究
為了研究預(yù)壓力對夾心式壓電驅(qū)動履帶移動系統(tǒng)的機械輸出性能的影響關(guān)系,將 U型預(yù)壓力調(diào)節(jié)機構(gòu)安裝在夾心式壓電驅(qū)動履帶移動系統(tǒng)上,如圖7所示,并開展了相關(guān)的實驗研究。

圖7 設(shè)置了U型預(yù)壓力調(diào)節(jié)機構(gòu)的夾心式壓電驅(qū)動履帶移動系統(tǒng)的原理樣機圖Fig.7 Prototype of the sandwich piezoelectric actuated tracked mobile system assembled with the U-shaped preload adjustment mechanism
3.1 測振實驗
首先,利用多普勒激光測振儀(Polytec, PSV-330F-B,德國)對安裝了U型預(yù)壓力調(diào)節(jié)機構(gòu)的夾心式壓電振子進(jìn)行測振實驗,確定其振動特性。測振實驗結(jié)果如圖8所示。以夾心式壓電振子的一根變截面梁以及與之相連的一個驅(qū)動圓環(huán)為測試對象,通過掃頻實驗得到了如圖8(a)所示的幅頻曲線圖。測試得到的兩相工作模態(tài)的共振頻率分別為35.14和35.44 kHz,頻率差為300 Hz。對應(yīng)工作模態(tài)的共振頻率與有限元仿真結(jié)果接近,說明有限元仿真結(jié)果的正確性。基于掃頻結(jié)果得到的兩相工作模態(tài)的共振頻率,對夾心式壓電振子進(jìn)行了定頻實驗,結(jié)果如圖8(b)所示。可以看出,夾心式壓電振子通過測振實驗得到的兩相工作模態(tài)A和B的振型與有限元仿真結(jié)果基本一致,進(jìn)一步驗證了有限元仿真分析的正確性。

圖8 安裝有U型預(yù)壓力調(diào)節(jié)機構(gòu)的夾心式壓電振子測振實驗結(jié)果Fig.8 Vibration measurement results of the sandwich piezoelectric actuator assembled with the U-shaped preload adjustment mechanism
3.2 最佳預(yù)壓力測試
在課題組之前的工作中發(fā)現(xiàn),履帶靠自身的張緊力與夾心式壓電振子的驅(qū)動圓環(huán)接觸,一旦履帶移動系統(tǒng)樣機工作時間長,履帶內(nèi)表面存在磨損,從而改變了履帶與驅(qū)動圓環(huán)之間的預(yù)壓力,原理樣機的輸出性能受到影響,導(dǎo)致系統(tǒng)穩(wěn)定性下降[16]。因此,開展最佳預(yù)壓力實驗研究對于提高系統(tǒng)的穩(wěn)定性和工作效率十分必要。預(yù)壓力調(diào)節(jié)方法如圖9所示,改變金屬桿與連接塊上表面的距離h以實現(xiàn)履帶與壓電振子的預(yù)壓力調(diào)節(jié)。通過測試金屬桿在不同高度位置施加給履帶的支撐力,以獲得履帶和壓電振子之間的預(yù)壓力。通過改變預(yù)壓力,測試獲得了不同預(yù)壓力下原理樣機的最佳工作頻率及其對應(yīng)的最大平均運行速度,如圖10所示。兩相具有π/2相位差、幅值為300 V的電信號同時施加在原理樣機上。在未改變履帶和夾心式壓電振子之間的預(yù)壓力時,即預(yù)壓力由履帶自身張緊力確定,金屬桿與壓電振子連接塊上表面的高度距離為7 mm。實驗過程中,每一個預(yù)壓力值的增加意味著金屬桿上調(diào)高度增加1 mm。實驗結(jié)果表明,隨著金屬桿上調(diào)高度的逐漸增加,預(yù)壓力調(diào)節(jié)結(jié)構(gòu)施加在履帶上的支撐力以及原理樣機的最佳驅(qū)動頻率均呈現(xiàn)不斷遞增趨勢,而原理樣機的最大平均運行速度則表現(xiàn)為先增加再減小變化趨勢。因此,存在一個最佳的支撐力對應(yīng)原理樣機最大的平均運行速度,同時最佳支撐力對應(yīng)著履帶與夾心式壓電振子的驅(qū)動圓環(huán)之間的最佳預(yù)壓力。當(dāng)金屬桿上調(diào)高度為17 mm時,通過測算得到預(yù)壓力調(diào)節(jié)機構(gòu)施加在履帶上的支撐力為28.3 N,此時原理樣機的最佳驅(qū)動頻率為34.925 kHz,最大平均運行速度為42 mm/s。

圖9 施加在原理樣機上的預(yù)壓力大小測試方法Fig.9 Measured method of the preload applied on the system prototype

圖10 原理樣機的預(yù)壓力特性曲線Fig.10 Preload characteristic curves of the system prototype
3.3 牽引力特性測試
為了進(jìn)一步評估原理樣機在上述最佳預(yù)壓力情況下的系統(tǒng)輸出性能,開展了牽引力特性測試實驗研究。為了研究預(yù)壓力對原理樣機輸出牽引力的影響關(guān)系,進(jìn)行了原理樣機在無預(yù)壓力調(diào)節(jié)機構(gòu)和最佳預(yù)壓力這兩種工作狀態(tài)下的牽引力特性對比實驗。在上述2種預(yù)壓力狀態(tài)下,施加在原理樣機上的兩相激勵信號的相位差均為π/2,驅(qū)動頻率均為原理樣機在上述2種工作狀態(tài)下對應(yīng)的最佳工作頻率。在不同驅(qū)動電壓下,測試了原理樣機在上述2種預(yù)壓力工作狀態(tài)下的最大輸出牽引力,實驗結(jié)果如圖11所示。隨著驅(qū)動電壓幅值的增加,原理樣機在最佳預(yù)壓力下和無預(yù)壓力裝置2種工作狀態(tài)下所輸出的最大牽引力均呈現(xiàn)線性增加的變化趨勢。通過對比兩種預(yù)壓力工作狀態(tài)下原理樣機輸出的最大牽引力特性可以看出,在任意相同驅(qū)動電壓下,原理樣機在最佳預(yù)壓力工作狀態(tài)下輸出的最大牽引力均大于無預(yù)壓力調(diào)節(jié)裝置工作狀態(tài)。當(dāng)驅(qū)動電壓為400 V時,原理樣機在最佳預(yù)壓力工作狀態(tài)下的最大牽引力為6 N,而在無預(yù)壓力調(diào)節(jié)裝置工作狀態(tài)下的最大牽引力僅為0.578 N。因此,當(dāng)原理樣機工作在最佳預(yù)壓力工作狀態(tài)下輸出的最大牽引力超過了無預(yù)壓力調(diào)節(jié)裝置工作狀態(tài)下的10倍,充分說明在最佳預(yù)壓力工作狀態(tài)下,原理樣機的輸出性能得到了大幅提高。

圖11 原理樣機在2種預(yù)壓力狀態(tài)下的牽引力特性曲線Fig.11 Tractional characteristic curves of the system prototype under two preload states
為了研究原理樣機在最佳預(yù)壓力工作狀態(tài)下的牽引力與平均運行速度之間的關(guān)系特性,開展了相關(guān)的實驗測試,結(jié)果如圖12所示。兩相激勵電壓的幅值為250 V,驅(qū)動頻率為34.925 kHz,相位差為π/2。可以看出,隨著原理樣機輸出的牽引力增加,其平均運行速度逐漸減小。當(dāng)原理樣機的輸出牽引力達(dá)到3.5N,其平均運行速度小于5 mm/s。

圖12 原理樣機在最佳預(yù)壓力狀態(tài)下的平均運行速度與牽引力之間的關(guān)系Fig.12 Relationship between the mean velocity and tractional force of the system prototype under the optimal preload state
3.4 越障性能
為了評估原理樣機在最佳預(yù)壓力工作狀態(tài)下的越障性能,筆者以原理樣機攀爬臺階為例進(jìn)行了實驗研究,如圖13所示。兩相激勵電壓的相位差為π/2,幅值為250 V。原理樣機攀爬不同斜坡角度臺階的實驗結(jié)果如圖14所示。可以看出,在最佳預(yù)壓力工作狀態(tài)下,隨著臺階斜坡角度的增加,原理樣機所能攀爬的臺階高度值先增加后減小。原理樣機攀爬的最高臺階高度為207.8 mm,對應(yīng)臺階的斜坡角度為60°。當(dāng)臺階的斜坡角度大于60°時,原理樣機的驅(qū)動性能難以克服重力所帶來的阻力,從而無法再攀爬臺階。實驗結(jié)果表明,原理樣機具有良好的臺階攀爬性能,展示出了作為微小型月面巡視器移動系統(tǒng)的可能性。

圖13 原理樣機攀爬臺階示意圖Fig.13 Schematic of climbing stairs for the system prototype

圖14 原理樣機在最佳預(yù)壓力下攀爬臺階的高度與臺階的斜坡角度之間的關(guān)系曲線Fig.14 Relationship between the height of the climbed stairs and the slope angle of the stair under the optimal preload
月球表面多處存在溝壑,因而能否跨越溝壑以及最大能跨越的溝壑寬度成為了評估月面巡視器移動系統(tǒng)性能的重要指標(biāo)。為了測試壓電驅(qū)動履帶移動系統(tǒng)跨越溝壑的能力,開展了最佳預(yù)壓力工作狀態(tài)下原理樣機在不同驅(qū)動電壓下跨越溝壑寬度的實驗研究。兩相電信號的相位差為π/2,驅(qū)動頻率為原理樣機在最佳預(yù)壓力工作狀態(tài)對應(yīng)的頻率。原理樣機跨越溝壑的實驗結(jié)果如圖15所示。隨著驅(qū)動電壓的升高,原理樣機能夠跨越溝槽的寬度線性增加。原理樣機跨越溝槽的最大寬度為78 mm,所對應(yīng)的驅(qū)動電壓為400 V。上述實驗結(jié)果說明原理樣機具有良好的跨越溝槽能力。

圖15 原理樣機在最佳預(yù)壓力狀態(tài)下跨越溝槽的寬度與驅(qū)動電壓之間的關(guān)系Fig.15 Relationship between the width of crossing the trench and driving voltage under the optimal preload
3.5 模擬月壤環(huán)境下的運動速度特性
為了測試壓電驅(qū)動履帶移動系統(tǒng)在月壤/月塵環(huán)境下的運動特性,筆者進(jìn)行了最佳預(yù)壓力工作狀態(tài)下原理樣機在不同直徑的月壤顆粒環(huán)境下的實驗研究。選取了火山灰(顆粒直徑約為0.01 mm)作為月塵以及5種不同顆粒直徑的沙粒作為月壤,并且由單一粒徑的月壤/月塵構(gòu)建的工作界面厚度均為5 mm。
當(dāng)兩相幅值為250 V、具有π/2相位差的激勵信號施加在原理樣機上,實驗結(jié)果如圖16所示。當(dāng)原理樣機分別運行在火山灰工作界面以及直徑為0.1,0.8和3 mm 3種沙粒工作界面上,其平均運動速度均超過40 mm/s,由此可以說明由這些尺寸的火山灰和沙粒構(gòu)建的工作界面對原理樣機的運動性能并未產(chǎn)生阻礙作用。當(dāng)沙粒的直徑為0.5 mm和5 mm時,原理樣機運行的平均運動速度均低于30 mm/s,說明這兩種直徑的沙粒對原理樣機的運動性能產(chǎn)生了阻礙作用。實驗過程中發(fā)現(xiàn),微米尺度的顆粒(火山灰和直徑為0.1 mm的沙粒)容易進(jìn)入到履帶與驅(qū)動圓環(huán)的接觸界面,但在超聲振動作用會隨著履帶的運動排出接觸界面。雖然微米尺度的沙粒進(jìn)入接觸界面會改變界面的粗糙度,但履帶與驅(qū)動圓環(huán)之間的預(yù)壓力同時發(fā)生改變,因此接觸界面產(chǎn)生的摩擦力并未因沙粒的進(jìn)入而產(chǎn)生波動,保證了原理樣機的運動性能不發(fā)生較大改變。直徑為0.5 mm的沙粒對原理樣機的運行性能產(chǎn)生影響的主要原因是由于這種沙粒的直徑與履帶塊之間的間隙大小相近,導(dǎo)致沙粒容易卡在相鄰兩片履帶塊之間,改變履了帶的柔度,從而影響了原理樣機的運行性能。當(dāng)沙粒直徑為0.8 mm和3 mm時,沙粒構(gòu)建的工作界面適合原理樣機運行。因為這2種沙粒的直徑已經(jīng)大于相鄰履帶塊之間的間隙以至于不能影響履帶的柔度,并且不能隨著履帶的運動進(jìn)入原理樣機的接觸界面。當(dāng)原理樣機運行在直徑為5 mm的沙粒構(gòu)建的工作界面時,由于沙粒的直徑較大,阻礙了履帶的運動,致使原理樣機的運動性能下降。實驗結(jié)果表明,夾心式壓電驅(qū)動履帶移動系統(tǒng)能夠在月壤和月塵的模擬環(huán)境中工作。

圖16 原理樣機在最佳預(yù)壓力下的平均運行速度與沙粒直徑之間的關(guān)系Fig.16 Relationship between the mean velocity and sand diameter under the optimal preload
月球表面分布著多處月壤厚度不一的地帶,因此有必要開展原理樣機在不同厚度的月壤模擬環(huán)境下的實驗研究。筆者選取了火山灰和3 mm粒徑的沙粒構(gòu)建的不同厚度的沙堆作為原理樣機運行的月壤模擬環(huán)境。驅(qū)動電壓的幅值為250 V,驅(qū)動頻率仍為原理樣機在最佳預(yù)壓力工作狀態(tài)下的頻率。在上述兩種月壤模擬環(huán)境下,原理樣機的運動情況如圖17所示。可以看出,沙堆厚度以5 mm的間隔從5 mm增加到25 mm,原理樣機在上述兩種模擬月壤環(huán)境中的運行速度波動較小,說明模擬月壤厚度對原理樣機的運行性能影響較小。

圖17 原理樣機在最佳預(yù)壓力下的平均運行速度與沙堆高度之間的關(guān)系曲線Fig.17 Relationships between the mean velocity and height of sand pile under the optimal preload
4 結(jié) 論
1) 通過預(yù)壓力調(diào)節(jié)實驗研究發(fā)現(xiàn),原理樣機存在最佳預(yù)壓力使得系統(tǒng)的平均運行速度最大。
2) 在最佳預(yù)壓力的工作狀態(tài)下,對原理樣機進(jìn)行了牽引力特性實驗研究,結(jié)果表明:在相同驅(qū)動電壓下,原理樣機在最佳預(yù)壓力工作狀態(tài)下輸出的牽引力均優(yōu)于無預(yù)壓力裝置的情況下輸出的牽引力。
3) 在最佳預(yù)壓力的工作狀態(tài)下,對原理樣機進(jìn)行了越障性能測試,結(jié)果表明:原理樣機攀爬的最大臺階高度為207.8 mm,跨越的最大溝槽寬度為78 mm。
4) 在最佳預(yù)壓力的工作狀態(tài)下,對原理樣機進(jìn)行了模擬月壤環(huán)境下的運動特性實驗。結(jié)果表明,原理樣機能夠在不同粒徑的模擬月壤上平穩(wěn)運行。實驗結(jié)果充分表明,通過改變原理樣機的預(yù)壓力可以有效提升系統(tǒng)的機械輸出性能。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(2015年4期)2015-05-07 06:43:35
上海電機學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
