配電線路絕緣包裹機器人研制
2020-12-02 04:02:30,,,,,,
機械與電子 2020年11期
,,,,,,
(1.國網安徽省電力有限公司鳳臺縣供電公司,安徽 淮南 232000;2.華北電力大學,河北 保定 071003)
0 引言
近年來,隨著對供電可靠性要求的逐步提高,國家電網與南方電網內配網線路的絕緣化率正逐步引起關注。目前,對于架空裸導線的絕緣包裹工作一般會先申請線路停電,工作人員通過電力升降車或使用專用工具登桿完成,這種做法只適用于地勢平坦開闊的沿海及發展較快的內陸城市地區,具有很大的局限性,對于很多工況較為復雜的環境,例如發展較緩的鄉村和地勢坎坷的地區,不僅車輛難以到達施工位置,而且勞動強度大、作業效率低、作業質量不穩定,同時存在嚴重的人身安全隱患,已越來越不適應現代電網和經濟社會快速發展的需要。針對上述問題,急需開發一款能夠在線修復配電線路絕緣皮損傷的包裹機器人。
對于架空輸電線路機器人的研究,國外起步較早,可追溯到20世紀80年代,加拿大、日本、美國等先后開發了弧形導軌自主越障機器人[1]、懸臂式巡檢機器人[2]以及蛇形巡檢機器人[3-4]等,并隨著時間的推移,逐步進行版本更新[5-6],使得功能越來越完善。
國內外已有不少的研究成果[7-12]。其中具有代表性的,如武漢大學吳功平研究團隊在輸電線路巡檢機器人領域深耕多年,取得了不少研究成果[13-15]。此外,山東大學、中科院沈陽自動化研究所開展的輸電線路自動巡檢機器人研究[16-19],可實現絕緣子開裂、損壞等故障檢測功能,具有自主越障的功能,帶電行走試驗效果良好。還有部分學者在輸電線路鐵塔攀爬、絕緣子清掃以及防震錘檢修等領域開展相關研究[20-22]。
絕緣包裹裝置的技術研究起步于2010年左右,現仍在發展中。國內外已有學者[23-24]針對配電線路絕緣包裹技術開展了系列工作,本文研究團隊從2015年開始開發過多個版本的絕緣系列機器人,積累了不少有益成果[25]。但上述研究多從理論或技術上分析某個側面的問題,與實際應用還有差距。迄今為止,配電線路絕緣包裹裝置尚未有在工程中成功應用的報道,本文對此進行了工程應用研究。
1 機器人基本構造
1.1 總體結構
配電線路絕緣包裹機器人由機械系統與無線通訊控制系統組成,其中機械系統包括行走裝置、升降裝置以及柔性輸送與包裹裝置。機器人總體結構如圖1所示。
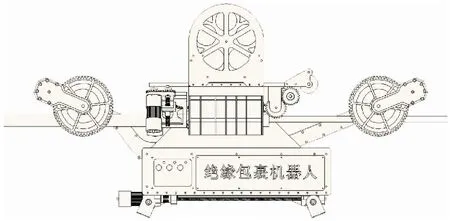
圖1 機器人結構
1.2 機械系統
絕緣包裹機器人的機械系統主要包括行走裝置、升降裝置以及柔性輸送與包裹裝置3部分。
行走裝置的設計決定了絕緣包裹機器人的運行速度,需考慮行走輪的結構設計適合不同型號的鋼芯鋁絞線且實際施工時掛線方便。選擇合適的具有足夠的機械強度并符合絕緣性能要求的材料,行走裝置是整個機器人掛線的支撐點。最終行走裝置設計如圖2所示。
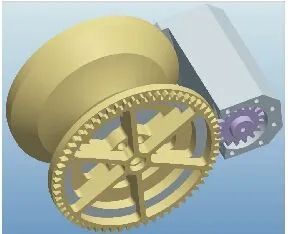
圖2 行走裝置設計
為了保證絕緣性能,行走輪選用尼龍材料,將尼龍棒料通過數控車銑加工成行走輪,并在行走輪邊緣銑成齒輪,通過齒輪嚙合的方式對其進行驅動。為了減輕重量,中間端面部分進行減重去除多余物料。保證強度的前提下,實現了局部結構的輕便化。
升降裝置采用正反螺紋結構使得2個交叉的機械臂夾角可調,隨之帶來機器人重心可上下調節,方便控制機器人包裹裝置和不同直徑導線中心相重合,保證絕緣包裹的順利進行。
柔性輸送與包裹裝置是完成包裹動作的執行機構,采用絕緣片對鋼芯鋁絞線進行包裹,由于絕緣片整體為柔性材料,不容易定型。料盤存儲的絕緣片是展開的平面直至最終包裹成圓筒形狀,需根據絕緣片的柔韌性均勻過渡成擬包裹的形狀,與此同時保證與行走速度同步的輸送速度。
1.3 控制系統
絕緣包裹機器人控制系統分為前端傳感器、中央控制處理器、末端執行機構和遠端操控臺,機器人控制系統結構如圖3所示。其中前端傳感器包括霍爾傳感器、電流傳感器、限位開關、編碼器以及圖像傳感器;末端執行機構的電機驅動包括行走電機、升降電機、夾緊電機和輸送電機驅動電路設計。
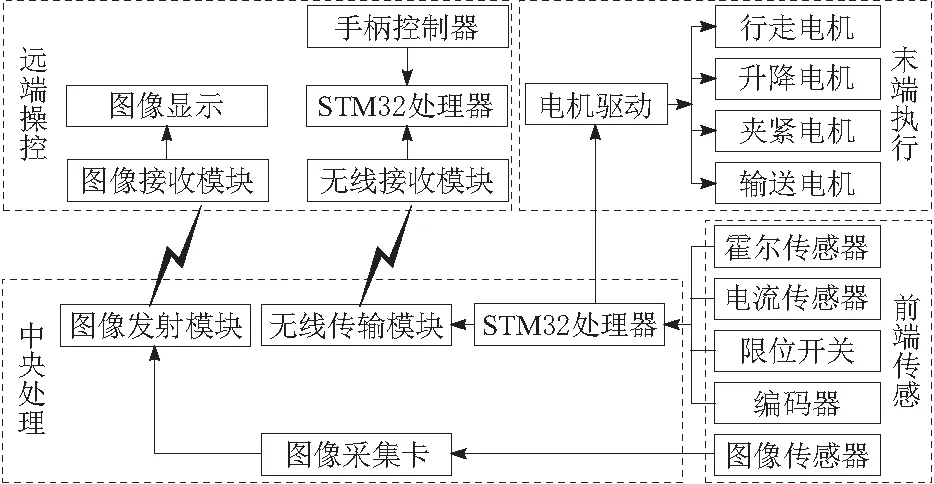
圖3 機器人控制系統結構
中央處理器是絕緣包裹機器人機身組件中的重要組成部分。中央處理器主要完成以下功能:可以實時控制行走電機、夾緊電機和輸送電機的運動;可以通過無線模塊與遠端操作箱實現實時雙向通信;可以實時測量機身的電壓以及電流,并將數據反饋回遠端操控箱;可以實現限位保護,用于機身機械組件的保護;程序開發人員可以進行調試。
中央處理和遠端操控處理器均選用意法半導體公司生產的Cortex-M3系列的STM32F103C8T6芯片,Cortex‐M3采用了哈佛結構,擁有獨立的指令總線和數據總線,可以讓取指與數據訪問并行不悖。
2 機器人工作過程
機器人工作過程如下:
a.通過絕緣斗臂車將機器人掛到配電線路上,遙控控制絕緣包裹機器人運動,結合實時傳輸回來的圖像,監測是否存在導線斷股、異物等異常情況,無異常情況下行走至將要修復線路的位置。
b.機器人停穩后,首先遙控升降裝置通過改變機械臂的夾角使得柔性輸送與包裹裝置的喇叭口中心與導線的中心重合,然后操作夾緊裝置將預留的絕緣片卡扣對接,使得絕緣片的初端完成對導線的包裹。
c.開始執行包裹動作后,按照設定的包裹速度,使二級輸送裝置、一級輸送裝置以及行走裝置的3個電機協同轉動,絕緣片能夠連續地包在鋼芯鋁絞線上,完成目標線路的絕緣修復。
d.最后,再次調節升降裝置使得柔性輸送與絕緣包裹裝置的喇叭口升高離開導線,機械人可回到初始位置或目標位置,至此,完成了缺陷線路的絕緣修復。
3 關鍵技術問題及解決方法
3.1 升降裝置設計
絕緣包裹機器人在進行絕緣包裹動作之前需提前巡檢查看線路的基本情況,是否允許進行絕緣修復。因此,執行包裹動作的機構在巡檢過程和包裹過程中的高低位置需進行調節。
考慮機器人的整體結構及工作過程,設計的升降裝置結構如圖4所示。2個機械臂采用交叉的方式,驅動電機連接的螺紋絲杠采用正反螺紋結構,使得執行包裹的機構在不同的工作狀態下,可以自由地上下調節。
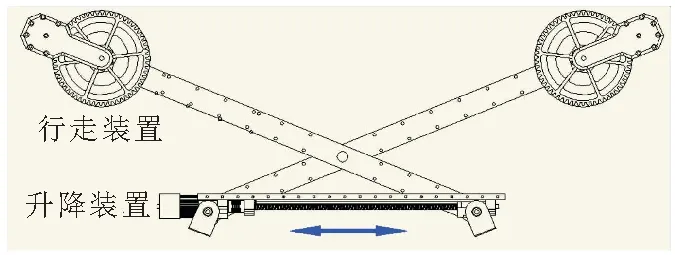
圖4 升降裝置結構設計
3.2 柔性絕緣材料包裹
絕緣片全名卡扣式絕緣護套管,硅膠材質,其硬度小較為柔軟,不容易定型,如何將平面的絕緣片包裹成圓筒形狀,是該機器人的主要創新點之一。經過多次方案論證—加工—組裝—調試,最終設計的柔性輸送與包裹裝置結構如圖5所示。
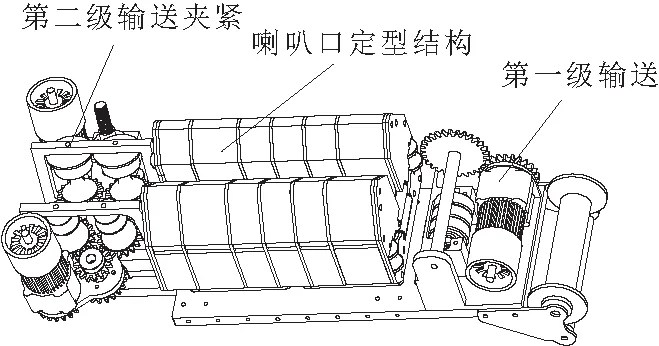
圖5 柔性輸送與包裹裝置
采用壓輪結構實現包裹片的輸送,兩壓輪通過彈簧緊壓包裹片,壓輪轉動完成輸送工作。采用2對相互嚙合的齒輪分別帶動壓緊輪實現包裹片的封口壓緊。2對壓緊輪構成一個封閉的圓管通道,壓緊輪主動轉動,包裹片經過時一邊被壓緊一邊被輸送,完成封口壓緊工作。絕緣包裹裝置的主體部分為包裹單元。包裹單元分為第一級輸送、喇叭口定型、第二級輸送夾緊3個部分。
第一級輸送部分為兩輪壓送,夾緊包裹片,減小了夾緊力和夾緊范圍,使得包裹片更容易以正確的角度進入機器內部。
第一級壓送裝置后,緊跟一套喇叭口輔助定形結構,由6塊3D打印的模型拼接而成,中間鑲嵌著若干滑輪,包裹片平展進入,逐步變彎曲,中間過渡平滑,包裹片呈半包圍狀態包在電纜上。
隨后包裹片進入第二級輸送夾緊部分,這一部分有4個壓緊輪,4個壓緊輪都為主動輪,由齒輪嚙合傳動,這樣,包裹片經過這一部分時,一邊被壓緊,一邊被輸送,從上一喇叭口部分拉過來,以此夾緊輸送輪轉速為主,包裹時第一級輸送部分和機器人行走部分都為輔助力,隨之轉動而向前運動。夾緊部分整體設計成鉗型,由電機控制張合,狀態夾緊為剛性夾緊。
3.3 強電磁干擾環境下信號傳輸
由于絕緣包裹機器人在進行包裹之前,應首先對線路進行巡檢,查看導線是否存在斷股、異物等情況,以及包裹過程中對包裹效果的實時監控,因此需設置2個攝像頭通過無線傳輸的方式傳送到地面操控人員的控制器上,強電磁干擾環境下如何保證控制指令、視頻信息的穩定傳輸也是本項目的關鍵問題之一。
針對以上問題,本項目從軟件和硬件2個方面采取措施予以解決。軟件上,在編寫程序時增加看門狗程序,對主程序的運行進行監控,防止程序跑飛或死鎖。此外,通信協議設置冗余校驗,接收裝置通過對比接收數據與發送數據的循環冗余碼,判斷數據通信是否正常,保證通信數據未丟失。硬件電路上,除了做好屏蔽措施,考慮電網帶來的50 Hz工頻干擾,增設帶阻濾波器去除工頻干擾,設計了工頻抑制器,包含帶阻電路、調幅電路以及運放調零電路,有效解決了工頻干擾帶來的系列問題。此外,還采取了配置去耦電容、電路板合理分壓、數字地和模擬地分離等措施,提高整個電路的抗干擾性能。
4 仿真與性能測試
4.1 抗干擾試驗
按照GB/T 17626.8—2006、GB/T 17626.9—2011標準對絕緣包裹機器人進行了測試。技術檢測內容:工頻磁場抗擾度;脈沖磁場抗擾度。結果如表1所示。
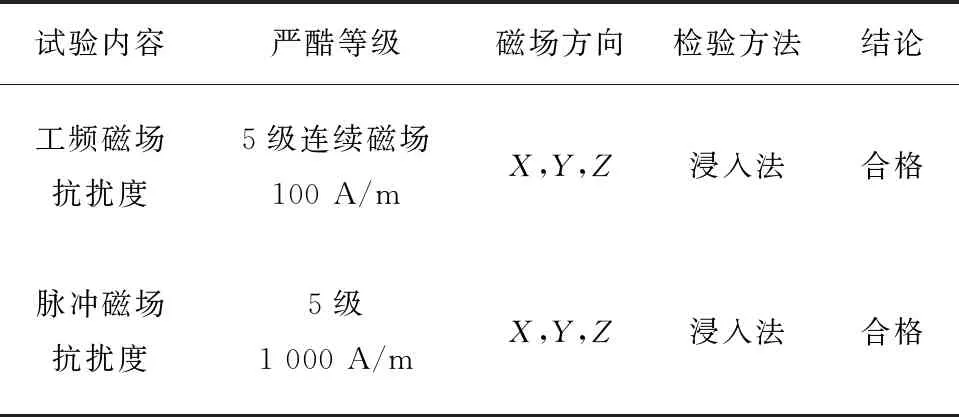
表1 抗干擾試驗結果
4.2 耐壓試驗
根據帶電作業用絕緣工具試驗導則規定[26],對機器人進行耐壓試驗,試驗結果如表2所示。

表2 耐壓試驗結果
根據試驗標準,在規定的試驗電壓和耐受時間下,機器人無閃絡、無擊穿、無發熱,試驗結論為合格。
4.3 10 kV線路測試
2017年4月,在安徽淮南供電公司某10 kV配電線路上進行絕緣包裹試驗,擬修復的絕緣長度為2 m,包裹作業現場如圖6所示。

圖6 絕緣包裹機器人作業
配電線路對地面的垂直距離為7 m,通過人工將機器人掛在導線上。遙控操作人員在距機器人約15 m處,遠程遙控機器人進行作業。
首先,操控機器人行走查看導線的基本情況,符合作業條件后,通過調節升降機構,使得柔性輸送與絕緣包裹裝置下降至導線的中心;然后,通過夾緊電機、輸送電機與行走電機的相互配合,開始執行包裹動作,絕緣片將導線完整的包裹起來;最后,完成絕緣修復后,將柔性輸送與包裹裝置升至導線上方,并行走至指定位置。
整個作業過程中,手持控制終端按鈕等控制均能正常操作,視頻信號及控制指令傳輸正常,無卡頓、模糊的問題,機器人抗干擾良好。絕緣包裹機器人行走、夾緊以及升降等動作靈活可靠,機械結構設計合理,執行動作快速可靠。
4.4 主要技術指標
經過多次修改設計并反復試驗后,最終定板的絕緣包裹機器人主要技術指標如表3所示。
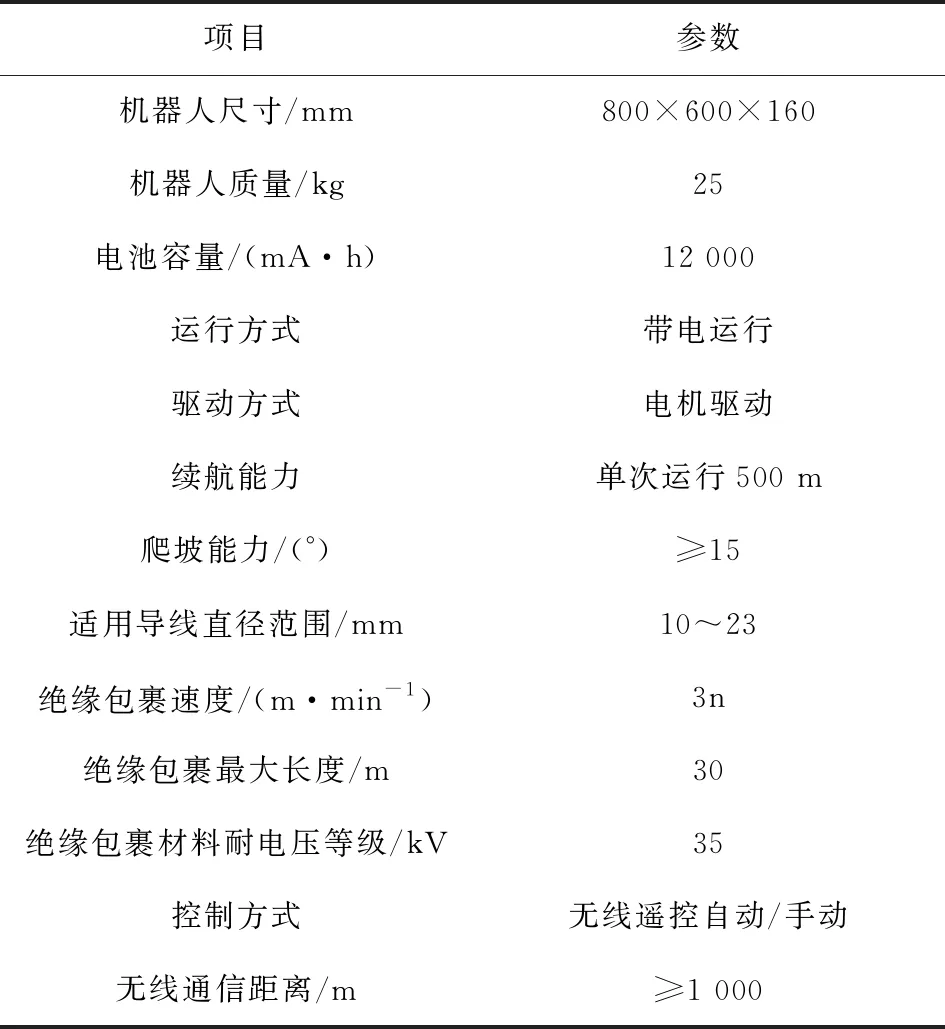
表3 絕緣包裹機器人主要技術指標
5 結束語
本文針對配電線路絕緣修復領域短板,研制了一套用在10 kV線路上、能夠在線修復配電線路絕緣皮損傷的包裹機器人,該機器人工作快捷、操作方便。
利用3D打印與滑輪銜接的技術,實現了柔性材料的均勻平滑過渡,順利解決了柔性材料輸送與包裹的問題,實驗測試效果良好。
采用正反絲杠、機械臂交叉的結構組成絕緣包裹機器人的升降機構,使得機器人在不同工作狀態下重心可自由調節,結構小巧,節省空間。
采用軟件冗余校驗和硬件屏蔽、濾波相結合的方式,保證了監控視頻和通訊指令的穩定傳輸,驗證了強電磁干擾環境下系統工作的穩定性。
通過本項目研究,在配電線路絕緣修復領域開辟了一條新的途徑,拓展了新的研究方向和絕緣修復思路,為配電線路絕緣修復機器人的推廣應用提供了理論和技術儲備。