超前支架自適應支護理論與應用
2020-11-30 07:59:26徐亞軍李丁一張德生
煤炭學報 2020年10期
關鍵詞:支架
徐亞軍,張 坤,李丁一,朱 軍,張德生
(1.天地科技股份有限公司 開采設計事業部,北京 100013; 2.煤炭科學研究總院 開采設計研究分院,北京 100013; 3.山東科技大學 機械電子工程學院,山東 青島 266000; 4.遼寧工程技術大學 機械工程學院,遼寧 阜新 123000)
隨著煤炭開采技術的發展,越來越多的礦區開始采用超前支架進行巷道超前支護。但是在實際使用中發現現有超前支架適應性不強,與巷道錨護系統匹配性也有待提高,具體表現為現有超前支架支護強度經常出現過支護(支護強度過高)或欠支護(支護強度不足)現象,超前支架行走過程中對巷道頂板反復支撐,造成巷道頂板和錨護系統破壞。如何提高超前支架的適應性,減少超前支架對巷道頂板和錨護系統的破壞已成為當前迫切需要解決的問題。文獻[1]對液壓支架自適應控制進行了定義,給出了支架圍巖自適應控制策略。文獻[2]提出了綜采工作面液壓支架-圍巖自適應控制方法,介紹了相關自適應控制裝置。文獻[3]介紹了放頂煤液壓支架自適應控制系統基本原理,利用液壓支架質量綜合監測保障系統,結合電液控制系統實現放頂液壓支架自適應控制。文獻[4]介紹了一種液壓支架支護阻力自適應分析方法。文獻[5]以ZY17300/32/70型兩柱掩護式液壓支架為例,研究基于粒子群算法求解最短時間的液壓支架最優過渡姿態,縮短液壓支架動作時間,實現液壓支架移架速度自適應控制。文獻[6]主要研究如何提高大傾角工作面液壓支架適應性的相關原理與方法。文獻[7]介紹了8 m超大采高工作面超大煤量自適應連續運行基本原理及其實現方法。文獻[8]介紹了液壓支架綜合工況自適應監測原理。文獻[9]介紹了一種能夠前后、左右擺動的超前液壓支架頂梁結構。
上述工作為筆者的研究創造了有利條件。應該看到,當前研究主要針對工作面液壓支架的自適應控制問題,很少考慮超前支架的自適應原理與方法。為了解決上述問題,筆者提出了超前支架自適應支護理論,介紹了超前支架自適應支護原理及其實現方法,研制了相關的自適應結構與控制裝置,以減少超前支架對巷道頂板與錨護系統的破壞,更好地維護巷道頂板,實現超前支架高可靠性支護。
1 超前支架自適應支護原理與方法
1.1 超前支架自適應支護定義
超前支架自適應支護是指超前支架具有根據巷道載荷變化與圍巖變形自主調整支護阻力、支護狀態與支護方式的能力。根據結構形式和控制方式的不同,將其分為支護姿態自適應、支護阻力自適應與支護方式自適應3種類型。其中,支護姿態自適應包括頂梁姿態自適應、整體支護狀態自適應,支護阻力自適應包括支護阻力大小自適應、支護阻力分布形式自適應和支護阻力升降速度自適應,支護方式自適應包括移架方式自適應和行走方法自適應。超前支架通過支護姿態自適應、支護阻力自適應、支護方式自適應3種方式自主調節自身狀態、支護阻力和行走方式,在保護自身結構不受破壞的條件下,有效維護錨護系統完整性,更好支護巷道頂板。
1.2 支護姿態自適應原理與方法
1.2.1頂梁姿態自適應原理與方法
由于礦井地質條件復雜多樣,巷道頂板經常起伏變化、凹凸不平,為了更好地支護頂板,要求頂梁必須具有前后傾斜、左右擺動的能力。根據上述要求,研制了能夠前后傾斜、左右擺動的超前液壓支架自適應頂梁結構。以圖1所示的巷道單元支架為例,左右立柱的柱帽上都設有限位板(圖1中綠色梯形塊),當頂梁縱向方向擺角超過設計角度α時,限位板與立柱的柱頭接觸限位,限制頂梁前后方向最大擺動量。
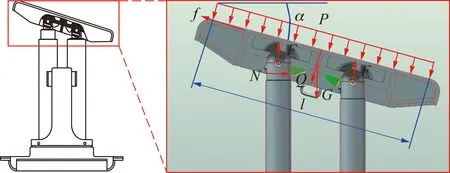
圖1 超前支架頂梁前后擺動示意Fig.1 Swing back and forth of canopy with advanced powered support
若頂梁縱向均布載荷集度為P,頂梁長度為l,前后擺角為α,假設左右立柱受力相同,有

(1)
式中,Q為支架表面垂直載荷,Q=Pl,kN;G為頂梁重力,kN;f為頂梁表面摩擦力,f=μQ,kN;F為單根立柱工作阻力,kN;N為限位塊受到的水平力,kN;μ為頂梁與頂板間摩擦因數。

頂梁與頂板間摩擦因數μ=0.2~0.3[10],由式(1)可知,頂梁最大擺角α=arctanμ=11.3°~16.7°,考慮到頂梁前后擺動時立柱頂端有水平力N,為了防止立柱在水平力作用下失穩,實際使用時,頂梁前后擺角一般取5°~10°。當巷道沿工作面走向方向最大變化角度不超過設計角度α時,在立柱支撐力作用下,頂梁能夠自主調節姿態,充分地接觸巷道頂板,避免了點接觸現象發生,以適應巷道頂板起伏變化。上述結構既保護支架結構不受破壞,又能給巷道頂板以很好地支護。
頂梁除了有上述縱向方向傾斜變化功能,還應有橫向方向調節能力。假設頂梁橫向均布載荷集度為q(kN/m),頂梁寬度為B(m),頂梁橫向擺角為β,支架表面垂直載荷為Q(Q=qB),取頂梁為研究對象,由圖2(b)可知,若兩根立柱受力一致,有
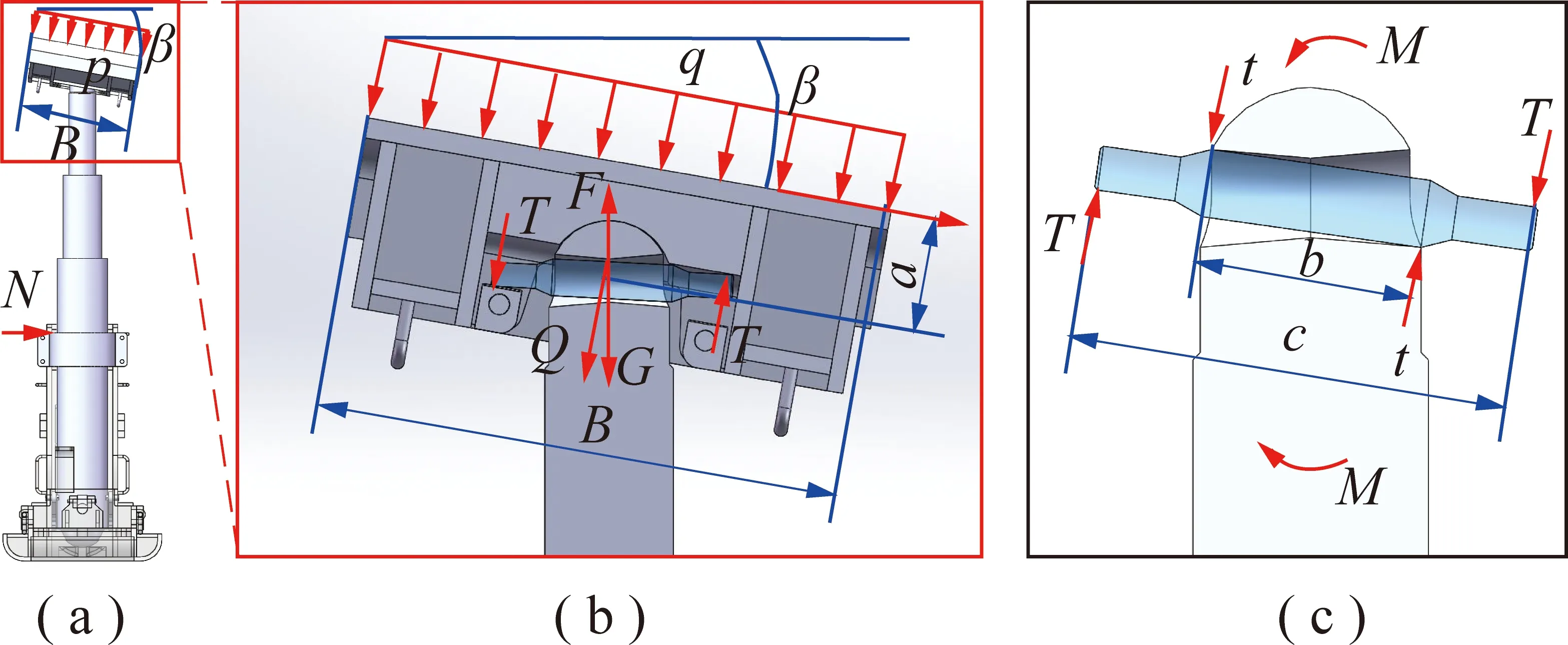
圖2 超前支架頂梁左右擺動示意Fig.2 Swing left and right of canopy with advanced powered support

(2)
式(2)同樣說明了自適應頂梁具有轉化作用力分力方向的結構特性。由式(2)可知,頂梁最大擺角β=arctanμ=11.3°~16.7°,實際設計中,頂梁左右擺角通常取10°~15°。取頂梁和立柱為研究對象,由圖2(a)可知,底座固定座受到的水平力為
N=Q(sinβ-μcosβ)/2
(3)
該水平力主要由底座固定座承擔,由于固定座高度較低,穩定性較好,有效地保證了立柱結構不受破壞。頂梁左右擺動主要由柱頂銷(圖2(b)中藍色銷軸)限位。分別取頂梁和柱頂銷為研究對象,由圖2(b),(c)可知,當頂梁向左、右橫向偏轉角超過設計擺角β時,柱頂銷兩端分別通過固定耳座和柱帽耳孔進行限位,其產生的轉矩M由柱頂孔兩端的接觸力矩進行平衡,即
M=fa,M=Tc=tb
(4)
式中,M為頂梁轉矩,kN·m;a為圖2(b)中摩擦力f到立柱銷軸中心孔的垂距;T為固定耳座、柱帽耳孔對柱頂銷的作用力,kN;t為柱頂孔對柱頂銷的作用力,kN;b為作用力t間的距離,m;c為作用力T間的距離,m。
由于b比c短,由式(4)可知,t>T,說明柱頂銷中部的受力比兩端要大。為此,將立柱上的柱頂孔設計為錐形對稱結構以對頂梁擺動進行限位;同時為了避免柱頂銷剪切破壞,將柱頂銷設計為如圖2(c)所示的兩端直徑較小、中部直徑較大的紡錘形結構。
1.2.2整體支護狀態自適應原理與方法
當超前支架設有穩定機構時,不能簡單地采用前面介紹的頂梁結構進行自適應調控。對于帶有穩定機構的超前液壓支架在支護過程姿態發生變化時(圖3),需要采用超前液壓支架姿態控制系統進行支護狀態調整[11]。具體方法是在底座、頂梁、掩護梁上安裝角度傳感器,在立柱上設置壓力傳感器收集支架姿態與支護阻力參數信息,獲取支架幾何參量,通過支架多維度姿態控制器實時感知支架姿態,判斷支架平衡狀態,通過電液控制系統調控立柱支護高度和相關千斤頂行程,改變頂梁和掩護梁姿態,調整支架支護狀態(圖3)。通過上述方法,實現超前支架支護狀態自適應調控。
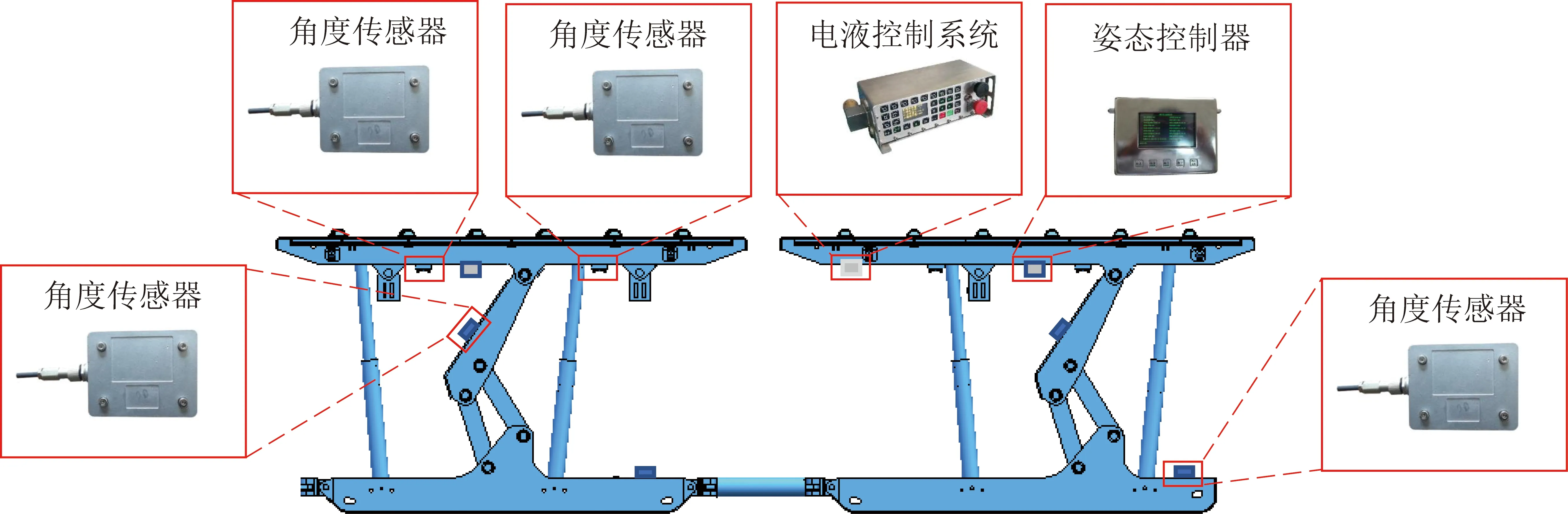
圖3 液壓支架各傳感器示意Fig.3 Each sensor of advance powered support
2 支護阻力自適應原理與方法
研究表明,超前支架的支護阻力曲線沿工作面走向近似線性變化[12],具有一定梯度分布特性,越接近采空區支護阻力越大。上述分布規律對初撐力和支護阻力都適用,因此超前支架沿工作面走向方向的初撐力和支護阻力也應采取梯度分布形式進行布置,只有這樣超前支架的支護阻力才能與巷道的載荷分布規律相一致。
2.1 初撐力分布形式自適應控制原理與方法
初撐力計算公式為
(5)
其中,F0為初撐力;P0為立柱下腔壓力;D為立柱內徑。由式(5)可知,立柱缸徑不變時,超前支架初撐力取決于立柱下腔壓力,因而控制好立柱下腔壓力即可控制立柱初撐力。初撐力自適應調控可以通過電液控制系統來實現。調控原理如下:根據超前支架前期載荷分布形式的數據采集結果,給出初撐力沿工作面走向分布形式,計算出不同位置處超前支架初撐力大小。液壓支架移架升架接頂時,壓力傳感器實時測量立柱下腔壓力,當立柱下腔壓力達到設計數值時即停止供液。電液控制系統可以根據系統設定數值自動調整超前支架初撐力,進而實現初撐力分布形式自適應調節。
2.2 支護阻力自適應控制原理與方法
文獻[13]提出用“低初撐、高工阻”的支護方法來避免超前支護對頂板的過支護,以減少超前支架對頂板的破壞。根據上述思想,設計了立柱支護阻力自適應控制系統,具體原理如圖4所示。立柱初撐時,操縱閥處于A位,立柱下腔和立柱上腔與供液管路P相通,立柱采用差動供液方式進行供液,初撐力為立柱上下環腔面積差乘以供液管路P的供液壓力,立柱初始工作時支護阻力較低,以達到低初撐力的目的。
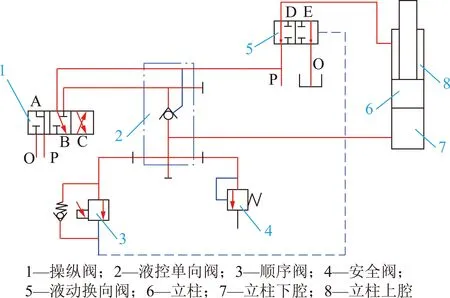
圖4 支護阻力自適應控制系統Fig.4 Self-adaptive control system for supporting load of powered support
立柱正常工作時,操縱閥處于B位,立柱上腔與供液管路P相通,立柱下腔被封閉,立柱下腔壓力隨外載增加而升高。立柱下腔壓力達到設定數值時,順序閥動作,液動換向閥換向,液動換向閥E口導通,立柱上腔與回液口O相通,差動供液方式解除,此時立柱支護阻力為立柱下腔壓力乘以立柱下腔面積。當立柱下腔壓力達到安全閥設定數值時,安全閥開啟,立柱達到額定工作阻力。
采用上述方法的立柱支護阻力曲線如圖5所示。圖5中,P0為泵站壓力;P1為立柱第1次峰值壓力時立柱下腔壓力;P2為順序閥動作壓力;Pmax為安全閥開啟壓力;F1為立柱上下腔與泵站供液口相通時立柱初撐力;F1max為順序閥動作時立柱支護阻力;F2為立柱上腔與泵站回液口相通時立柱支護阻力;F2max為立柱上腔與泵站回液口相通時立柱工作阻力;ΔFmax=F2max-F1max。圖5中,曲線1為差動供液時(立柱上腔與泵站出口壓力管路相連),立柱支護阻力曲線;曲線2為非差動供液時(立柱上腔與泵站回液口管路相通),立柱支護阻力曲線。若立柱下腔面積為S1,上腔面積為S2,不考慮系統背壓影響,有
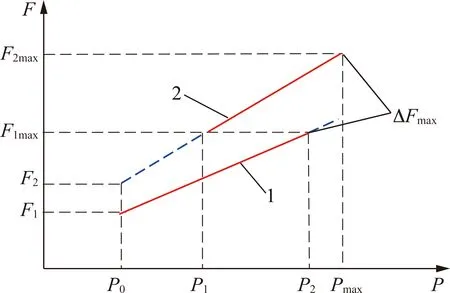
圖5 支護阻力曲線Fig.5 Support resistance curves
F1=P0(S1-S2),F1max=P2(S1-S2)
(6)
F2=P0S1,F2max=PmaxS1
(7)
由式(6),(7)可知,曲線1,2的初撐力差ΔF=F2-F1=P0S2,曲線1,2峰值阻力差為ΔFmax=F2max-F1max=(Pmax-P2)S1+P2S1。不難發現,上述方法不僅滿足了立柱“低初撐、高工阻”的設計要求,而且增加了支護阻力變化幅度范圍,具有峰值助力特性,整個調節過程立柱壓力隨外部載荷變化自動調節大小,達到了自適應調節目的。
2.3 初撐升柱速度自適應原理與方法
為了防止液壓支架接頂時對巷道頂板產生沖擊,設計了基于立柱升降復合控制系統的超前支架升降速度自適應控制裝置,以實現超前支架與頂板平穩接觸。如圖6所示,該裝置由位置控制回路和壓力控制回路組成,在頂梁上安裝壓力傳感器檢測頂梁與巷道頂板接觸狀況,支架接頂前采用位置控制回路,實現超前支架快速升降;當頂梁接觸巷道頂板時,模糊切換控制器自動切換為壓力控制回路,立柱由快速升高轉換為平穩升高,實現超前支架平穩接頂。
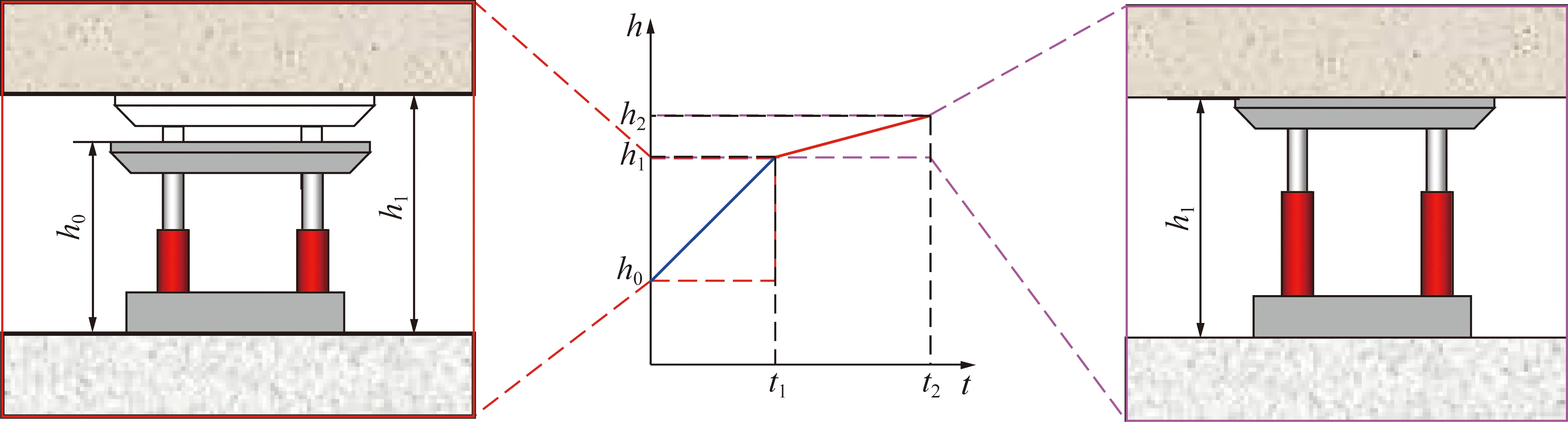
圖6 超前支架平穩接頂示意Fig.6 Smooth roadway roof connection of advance powered support
建立單個立柱油缸的電液耦合系統仿真模型(圖7)。假設頂板為彈性體,液壓缸為單活塞雙作用液壓缸,考慮泄漏量模型的直徑配合誤差為0.02 mm[14]。
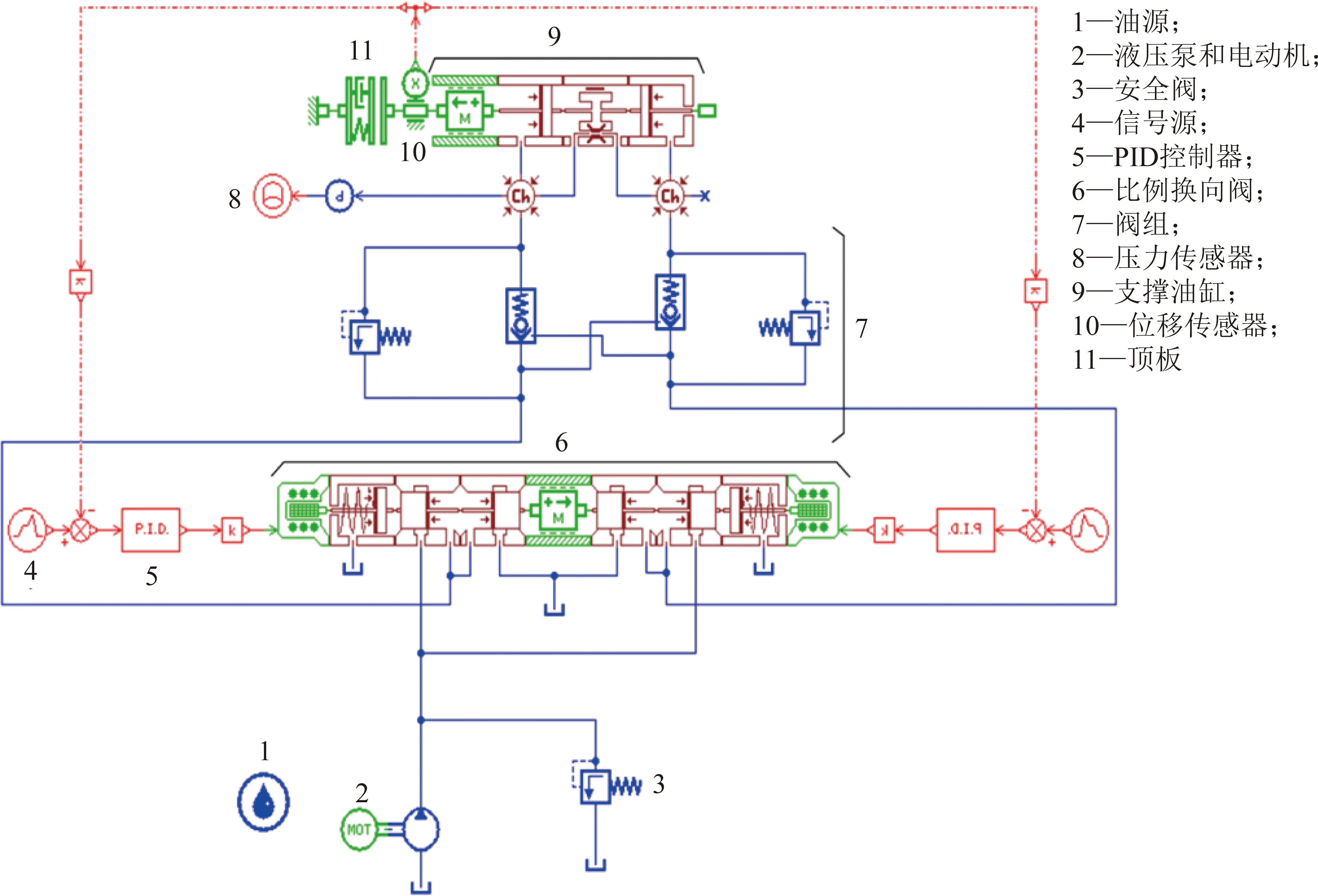
圖7 系統仿真模型Fig.7 System simulation model
以金雞灘煤礦ZCZ38400/28/53D超前液壓支架為例,確定仿真模型參數,見表1,其中,Kp為抗偏差比例參數;Ki為積分參數;Kd為微分參數。
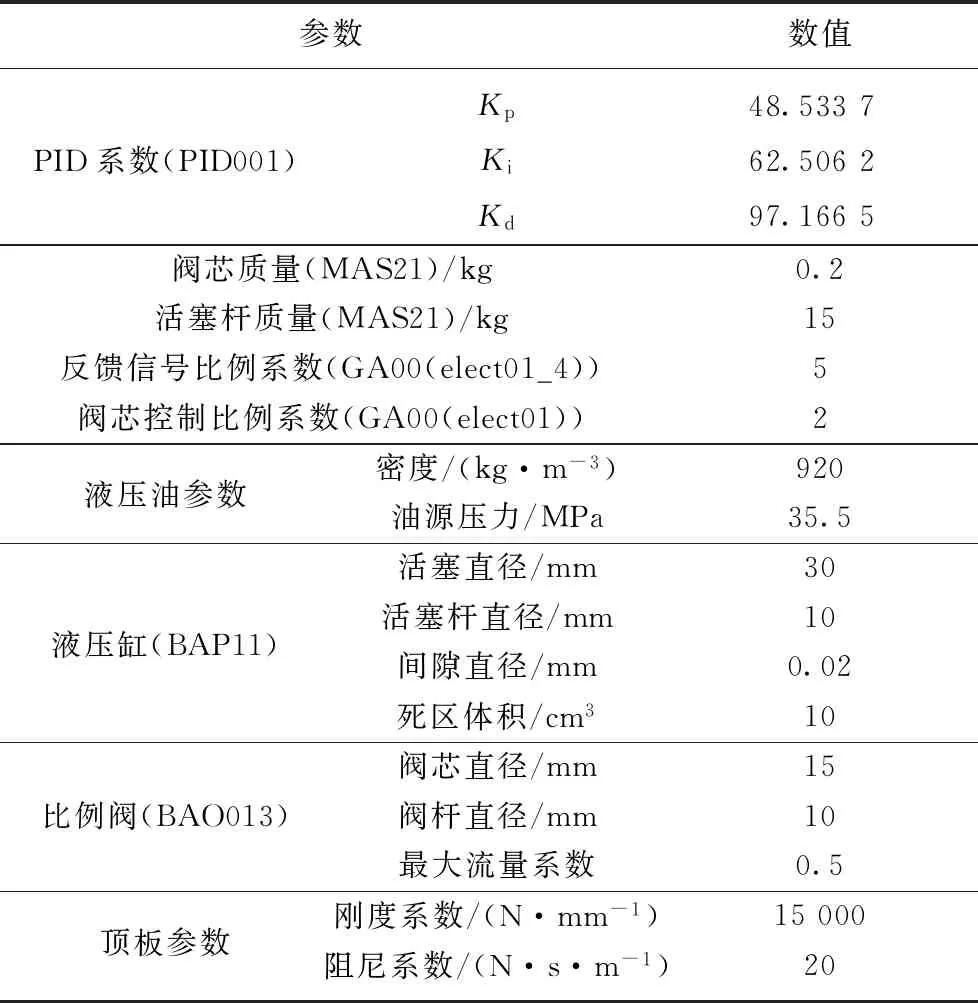
表1 仿真模型參數設置Table 1 Simulation model parameter settings
考慮系統泄漏和泵容積效率,液壓泵的轉速為100 r/min,仿真時間為4.0 s,采樣間隔0.02 s,初撐力設定為3 096 N,分別使用新型螢火蟲算法和神經網絡結合的PID控制器(改進PID控制器)[15]和普通PID控制器進行“降架—移架—升架”這一過程的仿真,結果如圖8,9所示。
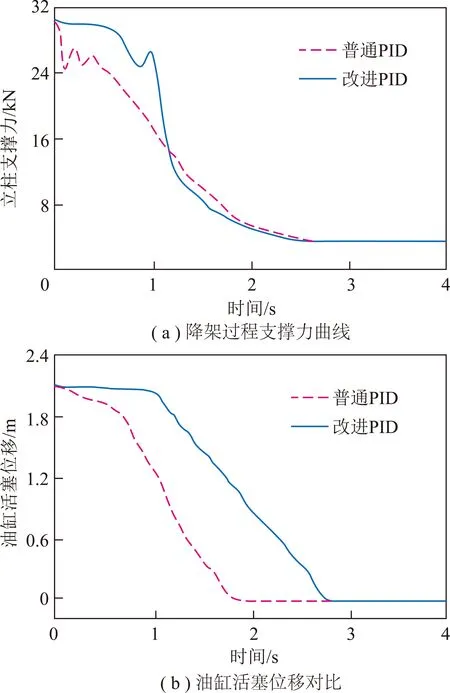
圖8 立柱降架過程仿真結果Fig.8 Support curve of falling process
由圖8(a)可知,改進PID控制器在降架過程支撐力在0~0.9 s時緩慢下降,在此時間段內支架頂梁與頂板開始分離,保證無支撐時頂板應力不發生突變,有效保護頂板;0.9~2.5 s時支撐力迅速減少,此時間段內超前支架頂梁與頂板分離,為保證超前支架快速移架,支撐力迅速減小; 2.5~4.0 s支撐力穩定不變,超前支護頂梁與頂板完成脫離。而普通PID控制器在降架初期,支撐力存在突變下降且波動較大,會造成小幅度反復支撐不利于保護頂板;另外,支撐力下降緩慢,在一定程度上影響支護效率。
由圖8(b)油缸活塞位移曲線可知,改進PID控制器在0~1.1 s時立柱緩慢脫離頂板,防止實際工況中振動現象的發生,抑制頂梁上下波動,避免對頂板反復支撐破壞;1.1~2.8 s由于超前支架頂梁與頂板已經分離,立柱快速下降,提高降柱效率; 2.8 s以后立柱完全回落,為下一步移架做好準備。改進的PID控制器避免了普通PID控制存在降架初期波動幅度過大,整個降柱過程效率低下的問題。
超前支架完成“降架-移架”動作后,超前支架升架過程仿真結果如圖9所示。由圖9(a)可知,應用改進PID控制器在升架過程支撐力在0~0.9 s時緩慢增加,有利于保證支撐立柱同步啟動;0.9~2.0 s時支撐力迅速增加,未與頂板接觸前,升柱速度快;2~4 s實行超前支架緩慢接頂策略,此時間段內支撐力緩慢增加到最后穩定不變,更好地保護頂板。而普通PID控制器在升架初期,支撐力存在突變增加且波動較大,同步啟動難度大;另外,支撐力上升緩慢,影響升柱效率,在達到初撐力設定值時不能平穩過渡。

圖9 立柱升架過程仿真結果Fig.9 Support curve of hoisting process
由圖9(b)可知,應用改進PID控制器在0~1.1 s時立柱快速上升,提高升柱效率;1.1~2.8 s超前支架頂梁與頂板即將接觸,立柱緩慢上升,防止實際工況中振動現象發生,抑制頂梁位移上下波動,避免振動對頂板擾動破壞; 2.8 s以后活塞與頂板完全接觸,超前支架達到初撐力設定值。改進的PID控制器解決了普通PID控制存在升架速度緩慢、頂梁臨近頂板時不能平穩過渡的問題。
3 支護方式自適應原理與方法
支護方式自適應特指行走方式自適應,包括移架方式自適應和行走方法自適應兩方面內容。
3.1 移架方式自適應原理與方法
現有超前支架最大問題是反復支撐破壞巷道頂板[16-18]。由于采用順序前移方式進行移動,移動過程中液壓支架不停降柱、升柱[19],反復對巷道頂板加載、卸壓,造成巷道頂板破碎,加之支架擦頂移架時,移架力過大,直接剪切錨桿和錨索,致使錨桿和錨索松動破壞,托盤脫落,無法錨護,造成錨護系統失效。為此研制了全方位行走支架(圖10),采用螺旋推進器作為行走部(圖11),利用乳化液馬達驅動行走(圖12),最大持點是僅需改變左右2個螺旋推進器的轉速和轉向,即可實現前進、后退、側向平移和旋轉全方位行走[20]。
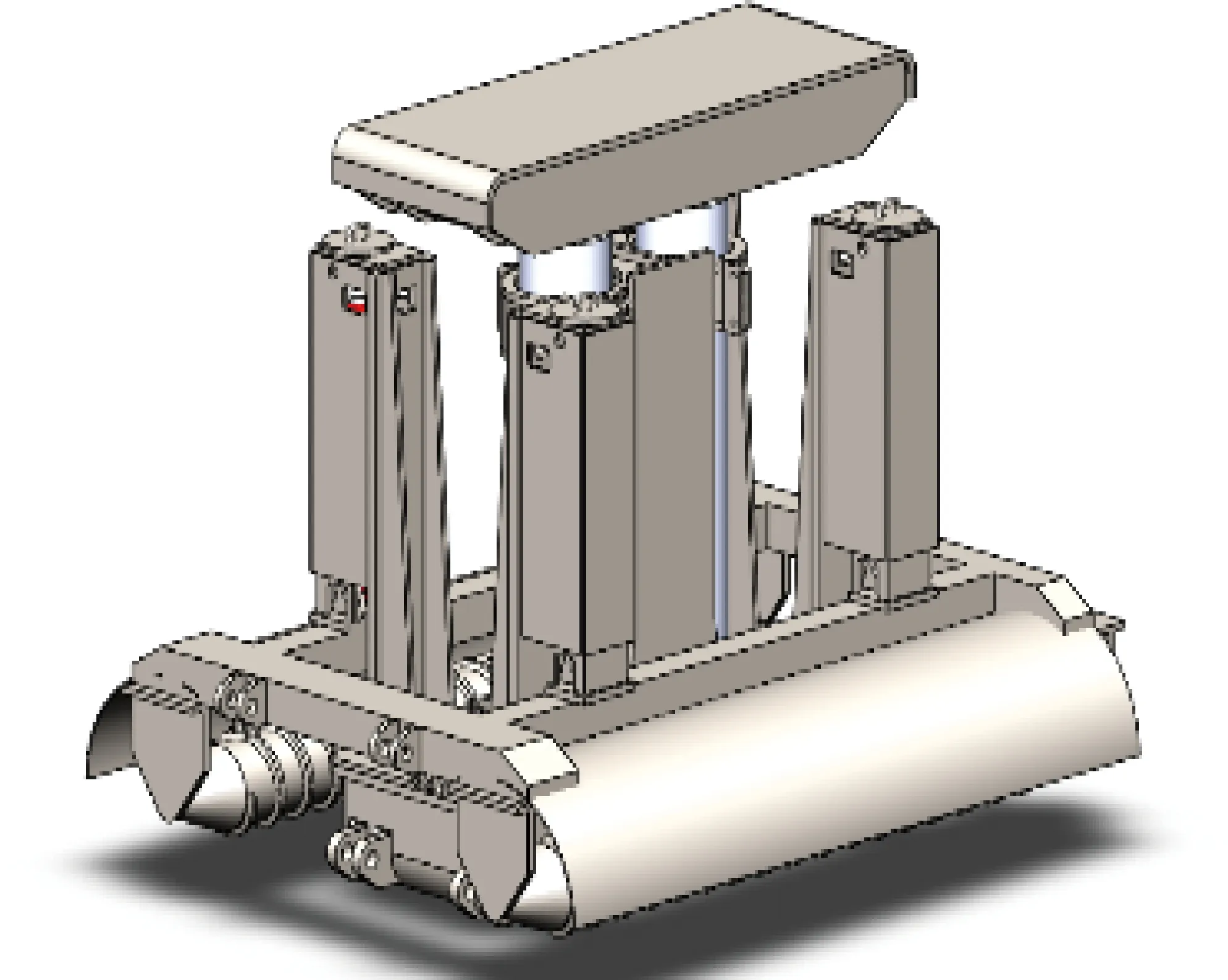
圖10 支架三維實體模型Fig.10 3D model of powered support

圖11 全方位行走部實物樣機Fig.11 Prototype of omnidirectional walking part
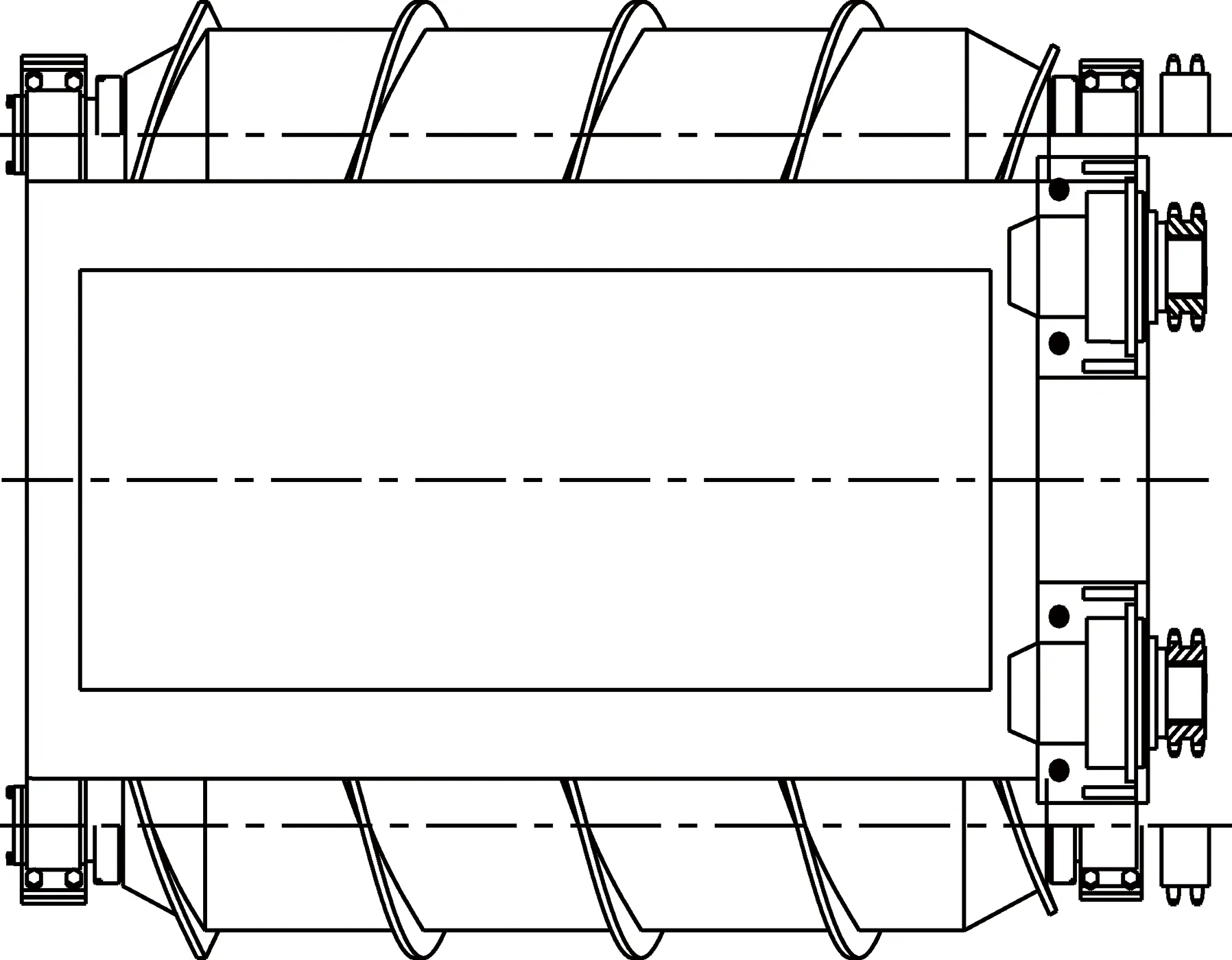
圖12 螺旋推進器行走部Fig.12 Walking part of screw propeller
圖13為螺旋推進器旋向與行走方向的關系,圖中左右側螺旋推進器的旋向分別為左旋和右旋。如圖13(a)所示,左側螺旋推進器向左旋轉,右側螺旋推進器向右旋轉,若左右螺旋推進器轉速都為ω、中徑都為r、螺旋升角為γ,左右側螺旋推進器y方向移動速度vy相互抵消,超前支架沿x方向前進或后退速度為vx=2ωrsinγ;如圖13(b)所示,左、右螺旋推進器都向左旋轉且轉速都為ω、中徑都為r,左右側螺旋推進器x方向移動速度vx相互抵消,超前支架沿y方向側向平移速度為vy=2ωrcosγ;如圖13(c)所示,左側螺旋推進器左旋,右側螺旋推進器不動,超前支架原地旋轉。
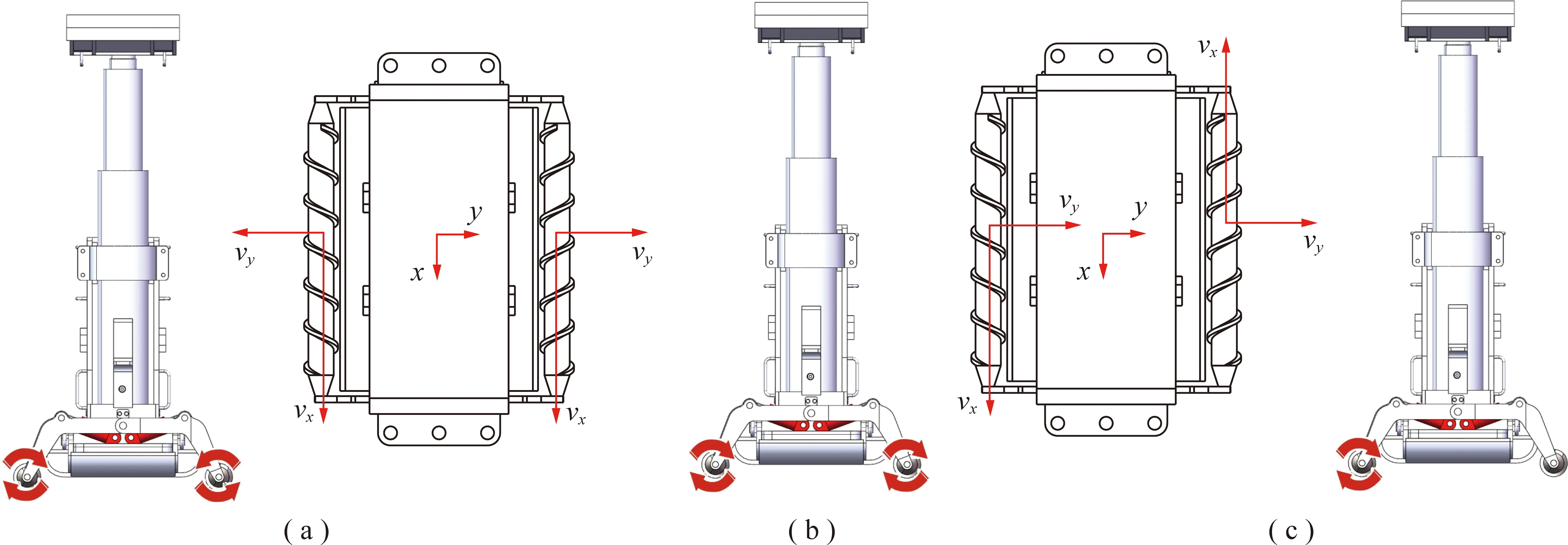
圖13 螺旋推進器旋向與行走方向的關系Fig.13 Relation between rotation direction and traveling direction of screw propeller
由于基于螺旋推進器的支架具有全方位行走功能,因此可以采用換位前移的方式進行移架。即將巷道中的最后一架超前支架直接移動到超前支架組的前方,變成第一架超前支架,通過行走方式的自適應,有效解決現有超前支架反復支撐破壞巷道頂板和錨護系統難題。
3.2 行走方法自適應原理與方法
如前所述,全方位行走支架最大特點是操作簡單,僅需改變左右兩個螺旋推進器的轉速和轉向,即可實現前移、側移和旋轉全方位行走[21-22]。該特點決定了該型支架易于實現智能行走。如圖14所示,在超前支架上布置紅外發射器、紅外接收器和超聲波測距裝置,超前支架根據紅外發射器和紅外接收器判斷超前支架行走方向,通過前后部測距裝置測量超前支架到兩幫煤壁距離dL1,dL2,dR1,dR2以及到相鄰超前支架間的距離dl1,dl2,dr1,dr2(圖15),比較上述參數差值,判斷超前支架判斷超前支架在巷道中的位置,以及是否在巷道中發生偏轉。通過上述方法修正支架位置信息,及時調整支架行走方式和行走狀態,實現超前支架自動導向自動行走與就位,智能行走流程如圖16所示,δ為系統設定的控制裕度。
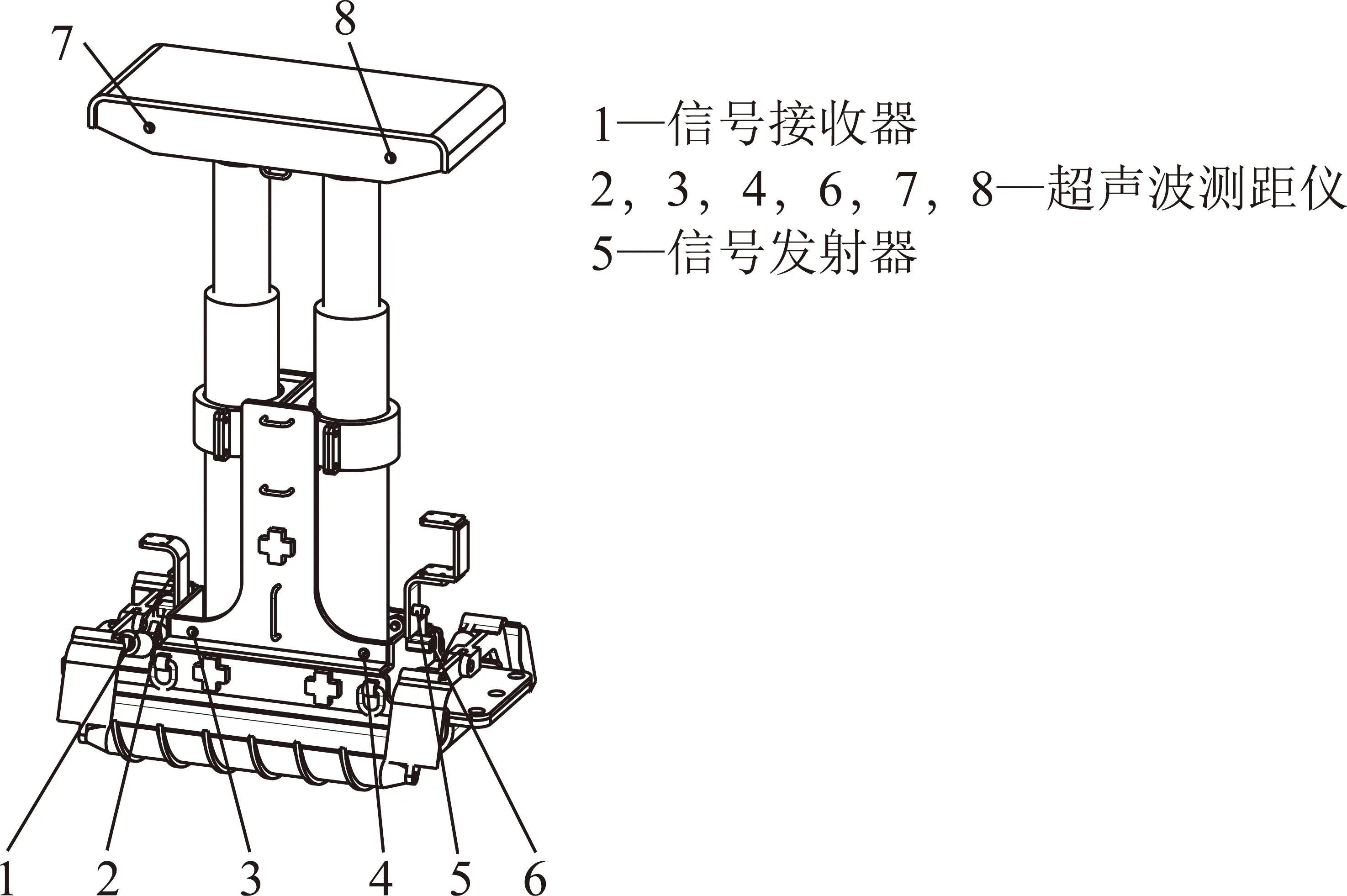
圖14 傳感器布置示意Fig.14 Sensor arrangement
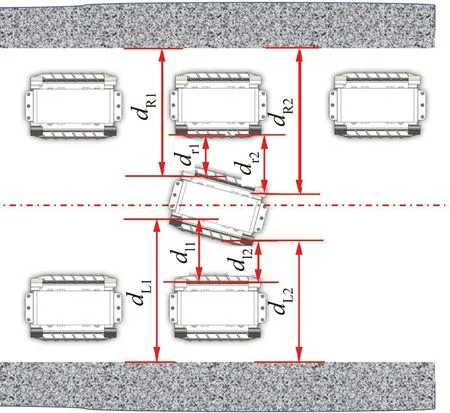
圖15 液壓支架測距示意Fig.15 Indication of measurement distance
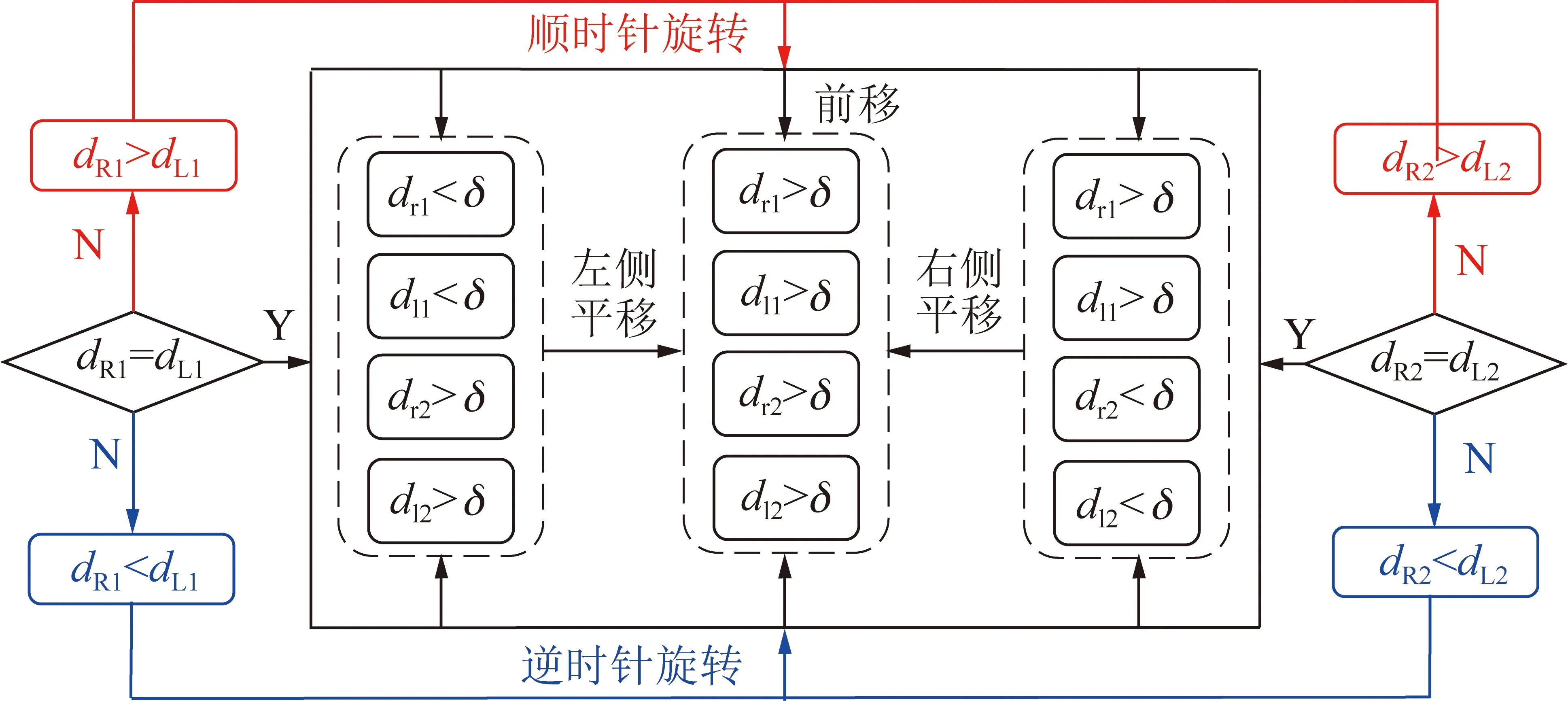
圖16 自動行走流程Fig.16 Automatic walking process
4 應用實例
2012年單元式超前支架最早在新汶礦業集團龍固煤礦試驗成功,2014年開始在淄博礦業集團唐口煤礦和新河煤礦等礦區推廣使用。計算參數如下:工作阻力Q=4 000 kN,最低高度2 060 mm,最大高度4 500 mm,頂梁質量1 500 kg,摩擦因數取0.2,a=0.15 m,b=0.3 m,c=0.15 m,具體參數見表2。頂梁正常狀態如圖17(a)所示,由圖17(b),(c)可知,頂梁前后擺角10°,左右擺角15°。頂梁前后擺角為10°時,由式(1)可知,頂梁表面受到的集中力、限位板水平力分別為Q=2F/(cosα-μsinα-G),N=Q(sinα+μcosα),代入數值得Q=4 195 kN,N=1 539 kN。頂梁左右擺角為15°時,由式(2)可知,Q=3 849 kN,此時每根底座固定座受到的水平力為N=518 kN,T=385 kN,t=770 kN。需說明的是,該型支架最早在龍固礦試驗時沒有采用自適應頂梁結構,很多柱頂銷都出現了不同程度的損壞。改用自適應性頂梁結構后,液壓支架適應能力大幅提升,柱頂銷很少損壞(圖18)。至此以后,由于結構簡單、質量輕,單元式超前支架開始在越來越多的礦區推廣應用[23]。唐口煤礦采用液壓支架工況監測系統進行支護狀態自動監測,提高了液壓支架適應能力。螺旋推進器的試驗結果表明,5 t載荷條件下,側向平移、前移后退運行平穩。利用同步閥保證左右液壓馬達流量均衡性,側向平移直線度良好,水平移動速度3 m/min[24],前進方向直線度偏差在30 mm/m左右。
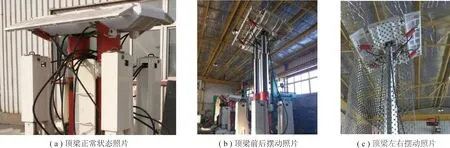
圖17 頂梁不同狀態照片Fig.17 Canopy in different state
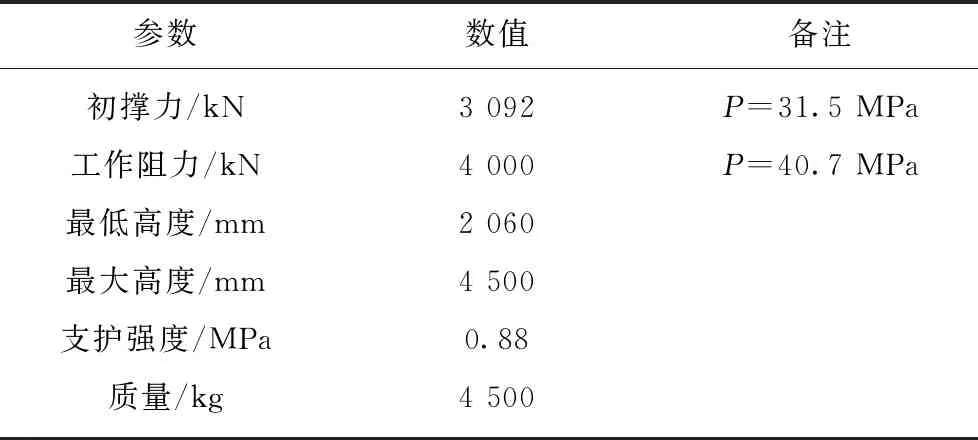
表2 ZQ4000/20.6/45單元式超前支架主要技術參數Table 2 Main Technical Parameters of ZQ4000/20.6/45 powered support

圖18 單元支架井下照片Fig.18 Unit powered support
5 結 論
(1)超前支架自適應支護是指超前支架具有根據巷道載荷變化與圍巖變形自主調整支護阻力、支護狀態與支護方式的能力。根據結構形式和控制方式的不同,將其分為支護姿態自適應、支護阻力自適應與支護方式自適應3種類型。
(2)對于沒有穩定機構的超前支架,為了避免立柱受側向力,利用自適應頂梁轉化作用力方向,頂梁具有前后、左右擺動能力,最大擺動角在10°~15°,通過頂梁姿態的自適應來減少立柱的側向受力,提高支架穩定性。對于設有穩定機構的超前支架,采用傾角傳感器和壓力傳感器獲取支架幾何參量,通過支架多維度姿態控制器感知支架實時姿態,通過電液控制系統改變立柱支護高度和相關千斤頂行程,實現超前支架支護狀態自適應調控。
(3)螺旋推進器僅需改變轉速和旋向,就可實現超前支架前進、后退、側向平移、旋轉,基于測距的自主導向系統,實現超前支架自動行走,行走速度3~4 m/min,直線度偏差30 mm/m,將其作為超前支架行走部,采用換位前移方式進行移架,可解決超前支架智能行走以及反復破壞巷道頂板和錨護系統難題。
(4)超前支架支護阻力存在非等強分布特性,通過超前支架初撐力分布形式、支護阻力大小以及升架接頂速度的自適應調控,解決超前支架與巷道頂板和錨護系統協調匹配性難題,提高超前支架適應巷道圍巖變化能力,實現超前支架自適應支護。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
