壓電驅動器遲滯非線性的增強型Prandtl-Ishlinskii模型建模及實驗驗證*
2020-11-27 10:04:18曾俊海
機電工程技術 2020年10期
鐘 云,黃 楠,曾俊海
(廣州大學機械與電氣工程學院,廣州 510006)
0 引言
隨著精密制造裝備運動速度和精度的提高,微納米級別的精密工程也越來越引起人們的關注。微納定位執行器是實現高精度微納米級定位的驅動機構。以壓電陶瓷驅動器為代表的智能材料驅動器以其具有無磨損、分辨率高、效率高、強度高、響應速度快等優良特性,被廣泛應用于MEMS、高速原子力顯微鏡、超精密機床和微加工平臺的定位系統中[1-2]。存在于壓電陶瓷驅動系統中的遲滯往往會導致系統精度下降、振蕩,甚至造成系統的不穩定[3-4]。例如,在開環情況下,遲滯會產生高達10%~15%的定位誤差[5]。與傳統非線性相比,遲滯表現出多值映射和記憶特性,使得其建模和控制變得異常困難。目前,以壓電陶瓷為代表的智能材料特性的建模和補償控制已成為微納定位技術領域中的一個熱點問題[6-7]。
遲滯建模主要有3類方法[8-9],一種是以Jiles Atherton模型為代表的物理建模方法,包括Duhem 模型、Bouc-Wen 模型等;另一種是以Preisach模型為代表的數學算子建模方法,包括 Prandtl-Ishlinskii 模 型 和 Krasnosel′ skii-Pokrovskii 模 型 等 ;還有一種是基于計算智能的智能建模方法。在物理建模方法中,模型通常采用微分方程來描述,模型結構復雜,參數較難確定。基于數學算子的遲滯模型采用基本數學算子,如relay 算子、play 算子、stop 算子等,進行線性疊加而成[9]。基于算子的遲滯模型雖脫離于遲滯特性的物理意義,但能夠準確描述遲滯現象,也被稱為基于現象的遲滯描述方法。基于算子的遲滯模型,由于求解其逆模型或者近似逆模型相對容易,特別是Prandtl-Ishlinskii 模型存在解析的逆模型,因此,被廣泛應用于壓電材料的遲滯建模。近年來,智能建模方法得到了國內外眾多學者的關注[10]。這類模型利用神經網絡、模糊樹對非線性函數的通用逼近性來描述遲滯。神經網絡、模糊樹建模控制方法實現容易,但系統跟蹤精度不夠高。針對一些特定輸入,也有學者提出不同的建模方法,例如GU等[11-12]針對正弦輸入信號,提出采用橢圓來對遲滯進行描述,取得了不錯的效果。
本文以基于dSpace 開發系統的壓電微位移平臺為對象,對改進的增強型Prandtl-Ishlinskii模型進行了驗證。實驗結果表明,本文提出的模型在低頻段的描述精度與傳統的Prandtl-Ishlinskii模型略有提高,但在高頻段,則其建模精度要高很多。這些都驗證了本文基于改進的增強型Prandtl-Ishlinski型(EPIM)遲滯建模方法的優越性。
1 基于增強型Prandtl-Ishlinskii 模型的磁滯非線性建模
Prandtl-Ishlinskii 模型是典型的唯象遲滯模型,是算子模型的一種,壓電陶瓷存在復雜的磁滯非線性可以用Prandtl-Ishlinskii模型進行描述,如下式所示。
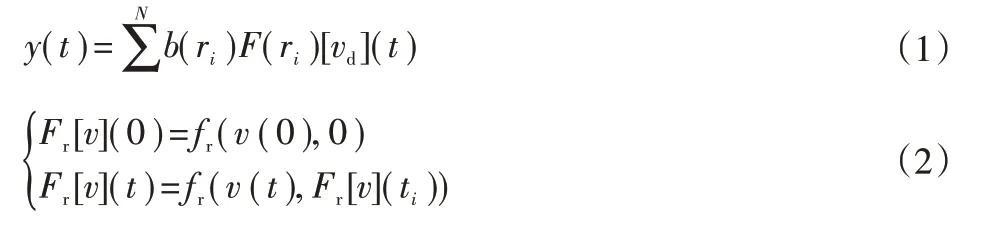
式中:b(ri)為待辨識的密度函數。ti<t<ti+1,0 ≤t≤N-1;?r≥0。
傳統P-I模型的對稱性,極大降低了該模型描述遲滯非線性現象的精確性。在Prandtl-Ishlinskii 模型(亦被稱為經典P-I模型)的基礎上進行改進,得到了具有非對稱性的增強型P-I模型。

式中:a1和a2為待辨識的增強系數;b(ri)為待辨識的密度函數;Fri[v](t)為play算子;ri為play算子的閾值,其具體定義見文獻[13]。
2 基于dSpace開發系統的實驗平臺
2.1 硬件結構
如圖1所示,壓電微位移實驗平臺由4部分組成:帶集成電容式位移傳感器的壓電定位平臺、低壓驅動放大器、dSpace開發系統和上位機。實驗平臺上使用的壓電微位移定位平臺被固定安裝在氣動隔振臺上,以減少支撐結構的誘導振動。

圖1 壓電微位移實驗平臺
壓電微位移實驗平臺的架構圖如圖2所示,集成電容式位移傳感器將位移信號-30~130 nm轉換成-0.3 ~1.3 V的模擬電壓,再通過dSpace開發系統中的16位ADC轉換成所需的數字信號。低壓驅動放大器的輸出電壓范圍為-30 ~130 V,控制輸入電壓范圍為-2 ~12 V,放大倍數為10。dSpace開發系統主要用于輸入信號的產生和控制算法的實現,以及位移傳感器的信號采集。
2.2 軟件結構
如圖2 所示,dSpace 開發系統通過上位的ControlDesk 軟件和Matlab/Simulink 環境來實現編程和在線測量,從而實現對壓電微位移實驗平臺的控制。ControlDesk 為實驗時使用的自動化軟件,同時ControlDesk 的圖形用戶界面為壓電微位移實驗平臺提供了實時的參數監控功能。GNU 編譯器和Matlab生成由dSpace獨立于Simulink運行的.sdf后綴可執行文件,從而構成了dSpace的快速控制原型實驗環境。DAC和ADC轉換器提供了位于dSpace與Simulink及壓電驅動器之間的接口。運行于dSpace中的程序采用基于C語言的S-function來實現。上位機中的實時數據模塊為ControlDesk提供數據接口,這樣當dSpace執行實時程序時,ControlDesk可實時讀取所需的測量數據。
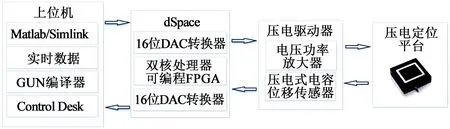
圖2 壓電微位移實驗平臺架構圖
3 測試實驗與結果
3.1 實驗步驟
低壓驅動放大器的輸出電壓范圍為-30 ~130 V,控制輸入電壓范圍為-2 ~12 V,放大倍數為10,因此本實驗將輸入到低壓驅動放大器的電壓在Matlab里面限制為-2~10 V。本實驗采用放大器輸出幅值為20 V的正弦波對壓電微位移平臺進行驅動。考慮到dSpace 開發系統的D/A 輸出硬件接口設置時,進行了歸一化處理,輸出-1~+1對應D/A輸出接口的-10~10 V,因此,對應到上位機Matlab 中的輸入信號則為v( t )=0.2 sin ωt ,其中w為正弦信號的角頻率。dSpace開發系統執行程序的采樣頻率設置為20 kHz。
設置好輸入信號后,壓電微位移平臺的實際輸出則通過dSpace 的A/D 轉換器讀入到上位機中。為了方便處理,本文將數據統一轉換為壓電微位移平臺的實際輸入和實際輸出,即壓電微位移平臺的輸入為壓電驅動器的輸出電壓,輸出則為位移傳感器的輸出。
為了驗證模型的有效性,本文在辨識得到增強型遲滯模型(EPIM)的基礎上,還將與經典的Prandtl-Ishlinskii遲滯模型(PIM)進行對比。實驗的具體步驟如下:首先,在不同頻率的正弦輸入信號下,利用ControlDesk 軟件實時采集壓電定位平臺的位移傳感器輸出信號;然后,根據測得的輸入輸出實驗數據,分別對本文提出的PIM遲滯模型和EPIM遲滯模型進行參數辨識;最后,得到不同輸入信號下壓電遲滯模型,并對數據進行分析。需要說明的是,為了對比方便,在所有模型參數辨識時,本文均采用的是Matlab中的fmincon函數來完成。
3.2 實驗結果
本實驗針對15 Hz、50 Hz、100 Hz和150 Hz等4個不同頻率的輸入正弦信號的壓電遲滯特性進行建模和遲滯模型參數辨識。輸入頻率為50 Hz時EPIM模型辨識參數如表1所示。
本實驗中,對于PIM遲滯模型和EPIM遲滯模型的算子個數均取 20,即 m=n=20[13]。分別對 15 Hz、50 Hz、100 Hz 和150 Hz等4個不同頻率的正弦輸入信號下的遲滯模型參數進行辨識。圖3~4給出了輸入為50 Hz正弦信號下的2種模型辨識結果,其他3種頻率下也有類似的結果,不一一給出。圖中,橫坐標為歸一化后的輸入信號,縱坐標為輸出位移信號,單位為μm 。從圖中可以明顯看出,2 種遲滯模型都能描述壓電陶瓷驅動器的遲滯特性。至于模型描述的準確性,本文采用均方根誤差來進行描述和對比。表2 所示為20 kHz 采樣頻率下1.5 s 采用時間內不同輸入信號下2 種模型對應的均方根誤差;表3 所示為相應的精度提高百分比。由表2~3 可以總結出,在低頻段,PI遲滯模型、EPI遲滯模型的均方根誤差相差不大,隨著輸入信號頻率的增大,EPI遲滯模型的優勢越來越明顯。在輸入信號頻率為50 Hz 時,EPIM 比PIM 的RMSE精度提高13.47%;當輸入信號頻率為150 Hz時,EPI模型比PI 模型的RMSE 精度提高27.09%。由此,證明EPI 模型對描述遲滯特性比傳統的PI模型具有較大的優勢。
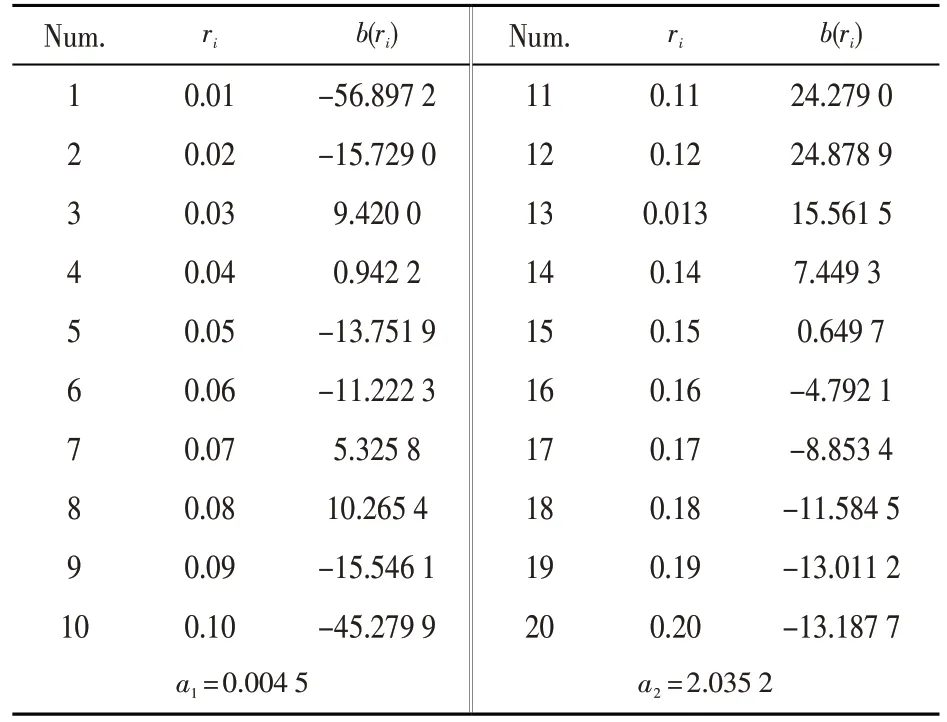
表1 輸入頻率為50 Hz時EPIM模型參數辨識結果
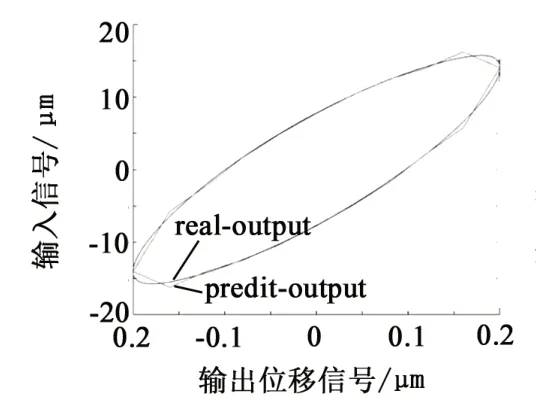
圖3 輸入頻率為50 Hz 時PIM模型實驗結果
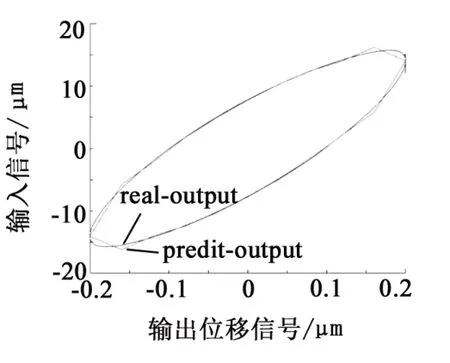
圖4 輸入頻率為50 Hz 時EPIM模型實驗結果
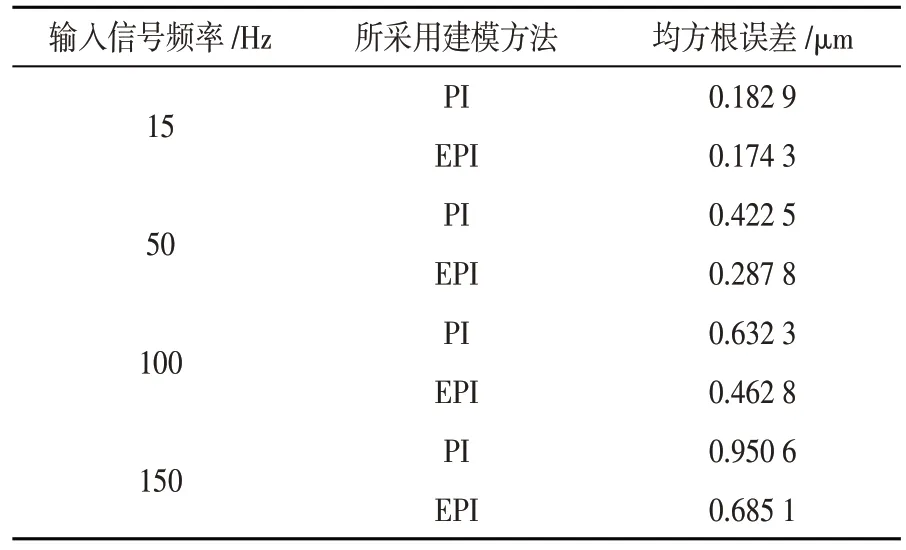
表2 EPIM建模方法與PIM比較結果
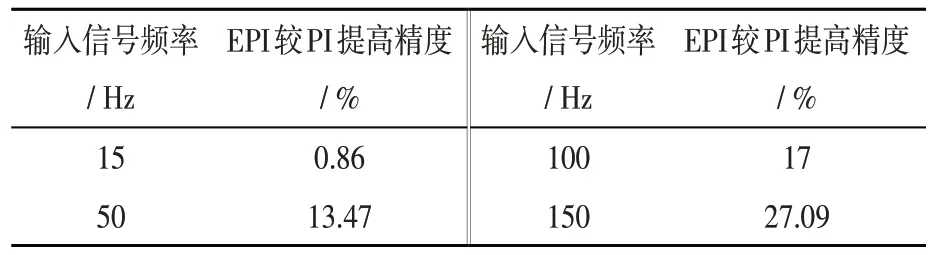
表3 EPI模型建模方法與PI模型相比提高的精度
4 結束語
本文針對周期性的正弦輸入信號,采用增強型遲滯模型(EPIM)來對壓電陶瓷的遲滯特性進行描述。在分析了壓電遲滯特性和經典的Prandtl-Ishlinskii 遲滯模型特性的基礎上,給出了壓電陶瓷遲滯特性的增強型遲滯模型(EPIM)。然后,搭建了基于dSpace 的硬件在環測試平臺用于模型的驗證。最后,對比傳統的PI 模型和改進的增強EPI 模型,給出了模型的實驗驗證結果。實驗結果表明,針對4種不同頻率的正弦輸入信號,EPI模型比PI模型優勢更好,低頻段描述精度略有提高,高頻段則增強型遲滯模型(EPIM)描述精度要高很多。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
