一種作用于后視盲區(qū)的倒車輔助裝置
2020-11-23 01:58:16石翔文劉宏達(dá)時(shí)明亮劉婷婷于靖博
汽車實(shí)用技術(shù) 2020年20期
關(guān)鍵詞:安全
石翔文 劉宏達(dá) 時(shí)明亮 劉婷婷 于靖博

摘 要:結(jié)合車輛倒車過(guò)程中可能出現(xiàn)的問(wèn)題,特別是在駕駛員注意力未集中或視野受到阻礙的情況下,都有可能極大提高事故發(fā)生概率,因此設(shè)計(jì)了一種作用于后視盲區(qū)的倒車輔助裝置。該裝置通過(guò)機(jī)械部件與電子測(cè)距系統(tǒng)相輔相成,實(shí)現(xiàn)倒車過(guò)程中針對(duì)汽車與障礙物之間距離的時(shí)刻變化,實(shí)時(shí)給予汽車駕駛員反饋,并在達(dá)到臨界危險(xiǎn)極值前予以緊急自動(dòng)剎車,從而達(dá)到降低危險(xiǎn)事故的目的。
關(guān)鍵詞:倒車輔助;裝置設(shè)計(jì);安全
中圖分類號(hào):U463 ?文獻(xiàn)標(biāo)識(shí)碼:A ?文章編號(hào):1671-7988(2020)20-48-03
Dalian Ocean University, Liaoning Dalian 116023 )
Abstract: The probability of accidents may be greatly increased because of the drivers distraction or dead zone during the reversing. Therefore, a kind of reverse assist device which acts on the blind area of rear vision is designed. The device complements each other through mechanical parts and electronic distance measurement system. It can give real-time feedback to the driver of the vehicle in the process of reversing, and make emergency automatic brake before reaching the critical danger extreme value, so as to reduce the danger accident.
Keywords: Park assist; Device design; Security
CLC NO.: U463 ?Document Code: A ?Article ID: 1671-7988(2020)20-48-03
前言
汽車行業(yè)發(fā)展至今,無(wú)論從駕駛速度還是使用舒適度日臻趨于完美,但對(duì)于常規(guī)車輛使用的安全性方面,尤其是倒車安全,受到車輛本身的可靠性以及駕駛員的技術(shù)和狀態(tài)的影響,并無(wú)確切標(biāo)準(zhǔn)來(lái)衡量,每年都有大量在倒車過(guò)程中發(fā)生事故的報(bào)道,因此倒車安全是關(guān)系到人員生命和財(cái)產(chǎn)安全的大事,也是許多汽車廠商和用戶所關(guān)心的眾多問(wèn)題之一。
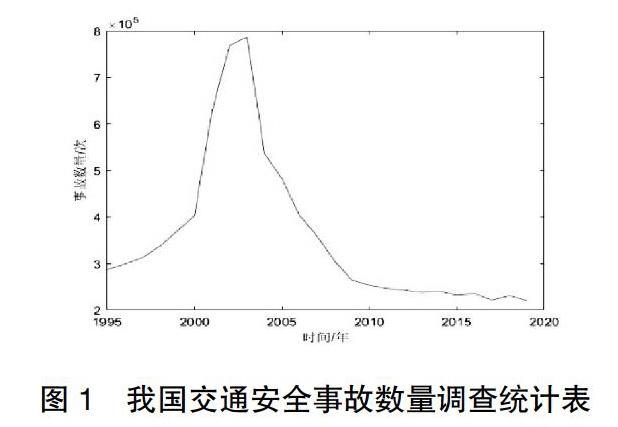
由圖1可得知,我國(guó)歷年交通事故雖有下降,其原因與汽車性能不斷提升和人們道路安全意識(shí)的不斷提高有關(guān),但其中倒車事故的發(fā)生依然占有很大比重,為了解決駕駛員在倒車過(guò)程中由于視野盲區(qū)以及駕駛員倒車技術(shù)有待加強(qiáng)而產(chǎn)生的事故,設(shè)計(jì)了這種結(jié)構(gòu)簡(jiǎn)單,使用安全的倒車輔助裝置,能夠同時(shí)實(shí)現(xiàn)蜂鳴提醒和自動(dòng)剎車兩項(xiàng)實(shí)用功能,以防止車輛繼續(xù)運(yùn)動(dòng)而發(fā)生不必要的事故,以保障車輛及車外人員財(cái)產(chǎn)的安全。
1 裝置原理
包含安裝在車輛防撞后方鋼梁上的紅外線發(fā)射設(shè)備,分別負(fù)責(zé)對(duì)后方及地面距離進(jìn)行判定。外管發(fā)射脈沖信號(hào),遇到障礙物后,發(fā)生反射,紅外信號(hào)經(jīng)過(guò)障礙物反射會(huì)有一部分被雪崩光電二極管光電探測(cè)器接收并且轉(zhuǎn)換為電信號(hào),其后經(jīng)過(guò)紅外線信號(hào)計(jì)算模塊輸入到濾波處理模塊。其后進(jìn)行控制操作,控制器模塊通過(guò)電機(jī)連接在剎車片下方位置,電機(jī)與傳動(dòng)部件及汽車剎車片相連形成聯(lián)動(dòng)關(guān)系。
其中距離計(jì)算模塊用于持續(xù)監(jiān)測(cè)車輛與其后方車輛或障礙物的距離信息,并將信息傳達(dá)至控制器模塊,控制器模塊通過(guò)控制電機(jī)轉(zhuǎn)子帶動(dòng)齒輪傳動(dòng),從而壓縮剎車助力器降低速度,達(dá)到停車的目的。
2 工作流程
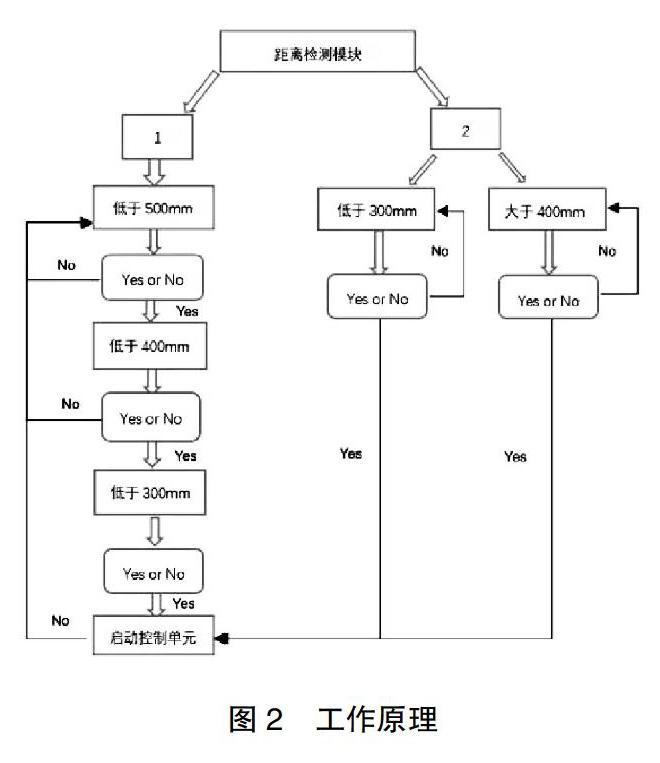
首先,濾波處理模塊持續(xù)工作,采集車輛后方與障礙物或車輛的位置距離信息,將信息傳遞給距離計(jì)算模塊,并且將車距信息與裝置內(nèi)置閾值相對(duì)比。由于裝置采用對(duì)地與對(duì)后方雙線監(jiān)測(cè),因此該程序分為兩部分,第一部分為對(duì)后方檢測(cè),本裝置擬采用500mm為第一閾值,400mm為第二閾值,300mm為第三閾值。當(dāng)所測(cè)車距信息數(shù)值小于一級(jí)閾值時(shí),啟動(dòng)蜂鳴器報(bào)警,當(dāng)所測(cè)車距信息數(shù)值小于二級(jí)閾值時(shí),蜂鳴器持續(xù)警報(bào)并增大蜂鳴頻率,由于控制器模塊啟動(dòng)所需時(shí)間相對(duì)較長(zhǎng),因此在此閾值狀態(tài)下進(jìn)行預(yù)啟動(dòng)。當(dāng)所測(cè)車距信息數(shù)值小于三級(jí)閾值時(shí),啟動(dòng)控制單元。第二部分對(duì)地面距離監(jiān)測(cè),擬設(shè)置閾值小于300mm以檢測(cè)后方地面突起,設(shè)置閾值大于400mm以檢測(cè)后方地面凹陷,見圖2所示。
3 控制系統(tǒng)設(shè)計(jì)
在車輛掛倒擋時(shí),紅外信號(hào)開始產(chǎn)發(fā)出,單片機(jī)收到信號(hào)后開始工作,產(chǎn)生紅外信號(hào),單片機(jī)通過(guò)紅外信號(hào)計(jì)算模塊的信息,可以測(cè)算出在探測(cè)范圍內(nèi)有無(wú)障礙物,以及障礙物的距離,并在達(dá)到閾值時(shí)能夠下達(dá)相應(yīng)的命令給蜂鳴器和電機(jī),從而使車輛做出反應(yīng),并進(jìn)入循環(huán)判定的過(guò)程,在車輛速度為零時(shí),程序停止判定,檢測(cè)終止(如圖3所示)。
本設(shè)計(jì)將單片機(jī)和傳統(tǒng)機(jī)械相結(jié)合。單片機(jī)采用STC公司生產(chǎn)的STC89C52。它是一種低功耗、高性能的CMOS 8位微控制器,具有8K的系統(tǒng)可編程閃存。可以完美運(yùn)行本設(shè)計(jì)程序,其冗余的的部分可便于后續(xù)更新開發(fā)使用。
4 機(jī)械結(jié)構(gòu)設(shè)計(jì)
4.1 主要部件設(shè)計(jì)
機(jī)械結(jié)構(gòu)部分設(shè)計(jì)的電動(dòng)機(jī)及齒輪軸承的裝配圖,與剎車片控制模塊相連(如圖4所示)。
該裝置以電機(jī)外套齒輪為主,其中齒輪選用的是一種特殊齒輪,其棘齒為可調(diào)節(jié)角度的活動(dòng)齒,通過(guò)和軸承鏈接的外殼部分與轉(zhuǎn)動(dòng)中的內(nèi)齒輪形成相對(duì)運(yùn)動(dòng),拓開活動(dòng)齒進(jìn)行傳動(dòng)工作,在工作停止后,電動(dòng)機(jī)反轉(zhuǎn)使齒輪收回齒腔。該設(shè)計(jì)解決了在解決裝置運(yùn)行后,腳踏板歸位抬起時(shí)所受到的電機(jī)旋轉(zhuǎn)阻力問(wèn)題,使該狀態(tài)下齒輪非嚙合狀態(tài),進(jìn)行空轉(zhuǎn)。齒輪部分如圖5所示。
蜂鳴器會(huì)根據(jù)不同的距離信息,以不同頻率蜂鳴來(lái)提示障礙物與車身后保險(xiǎn)杠的距離。駕駛者可通過(guò)不同頻率的聲音,來(lái)判斷障礙物距離。與蜂鳴器驅(qū)動(dòng)模塊相連。
5 系統(tǒng)測(cè)試及分析
5.1 實(shí)車可靠監(jiān)測(cè)
6 結(jié)論與展望
該設(shè)計(jì)初衷是為了將倒車變得更可靠和安全。通過(guò)簡(jiǎn)單的結(jié)構(gòu)以及低廉成本的材料要求,同時(shí)擁有性能可靠,性價(jià)比較高等特點(diǎn)。在當(dāng)今設(shè)計(jì)要求實(shí)用性與經(jīng)濟(jì)型并存的時(shí)代,其能夠滿足在汽車日常安全駕駛領(lǐng)域的要求,可謂是非常實(shí)用的優(yōu)化設(shè)計(jì)。
參考文獻(xiàn)
[1] 夏明.汽車倒車輔助系統(tǒng)的設(shè)計(jì)[J].裝備制造技術(shù),2017,(4):209- 211.
[2] 胡鵬,秦會(huì)斌.基于紅外測(cè)距汽車倒車?yán)走_(dá)預(yù)警系統(tǒng)設(shè)計(jì)[J].傳感器與微系統(tǒng),2018,第37卷(7):114-116,126.
[3] 張弘揚(yáng).基于單片機(jī)的汽車倒車?yán)走_(dá)設(shè)計(jì)[J].數(shù)碼世界,2017,(10): 36.
[4] 喬亞楠,劉新寬,劉平等.高強(qiáng)度鍍鋅鋼絲表面硬度與扭轉(zhuǎn)性能關(guān)系研究[J].功能材料, 2017,第48卷.(8):8053-8057.
[5] 廖曉文,賴香功.金屬熱處理工藝對(duì)齒輪材料性能的影響[J].世界有色金屬, 2019, (21):159-160.
[6] 單新平,蔣云峰,劉宗健.基于超聲波倒車?yán)走_(dá)的研究[J].汽車電器, 2019,(7):20-22.
猜你喜歡
中國(guó)科技博覽(2016年18期)2016-10-19 09:59:34
科技視界(2016年21期)2016-10-17 20:00:16
科技視界(2016年20期)2016-09-29 11:59:36
科技視界(2016年20期)2016-09-29 10:54:27
