獼猴桃采摘機械移動平臺結構設計及運動學仿真分析
2020-11-23 01:44:03葉振環李永強朱正龍汪玉蘭付娟
科技創新與應用 2020年33期
關鍵詞:結構設計
葉振環 李永強 朱正龍 汪玉蘭 付娟

摘? 要:鑒于獼猴桃集中采摘季節需要投入大量的人力物力,對高效率的獼猴桃采摘機器人的研究有著重要的意義。針對獼猴桃的種植方式及環境因素,文章采用四輪獨立控制進行轉向,液壓缸直接控制升降對獼猴桃采摘機器人移動平臺進行了設計。應用ADAMS軟件對設計完成的移動平臺進行了運動學仿真,結果表明設計完成的移動平臺結構無論在空載還是滿載情況下均能夠滿足平動及轉動工作狀態下的可靠性和平穩性要求。
關鍵詞:獼猴桃采摘;移動平臺;結構設計;運動學仿真
中圖分類號:TH133.33? ? ? 文獻標志碼:A 文章編號:2095-2945(2020)33-0006-05
Abstract: In view of the large amount of manpower and material resources required for the kiwifruit picking season, it is of great significance to study the efficient kiwifruit picking robot. According to the planting method and environmental factors of kiwifruit, this paper adopts four-wheel independent control for steering, and the hydraulic cylinder directly controls the lifting to design the mobile platform of kiwifruit picking robot. The ADAMS software was used to simulate the kinematics of the designed mobile platform. The results show that the designed mobile platform structure can meet the reliability and stability requirements of the translation and rotation working conditions no matter it is loaded or not.
Keywords: kiwifruit picking; mobile platform; structural design; kinematics simulation
目前應用于農業采摘類的智能機械與工業類、制造業等其它類型的智能機械的移動平臺有很大區別,農業采摘機器人的工作環境有很多不確定因素,是復雜多變的地皮表面,分布著很多雜草和沙石,這使農業機器人在控制和設計方面的難度更大。國內外學者在此領域做出了很多研究,也取得了較為豐富的成果[1-5]。
1 移動平臺總體結構設計
用于農業的機器人在農田、山地等這類較為復雜的環境中工作時須具備以下幾個特點:在工作過程中行駛動力足夠大能在一定的坡度地面工作;機器人的結構要緊湊,這樣才能在復雜的地面上完成精確的采摘工作;轉彎要靈活,方便調整機器位置;工作穩定性要好,這樣才能達到更好的采摘效果。
獼猴桃果樹是藤蔓型的,果樹不能直立生長,因此獼猴桃果樹是依靠纏繞在周邊的其它植被和通過人工搭建的棚架上生長的。人工搭建的棚架相鄰兩個鋼制支撐桿之間的間隔約為6m左右,順著種植的行列每隔50-60mm左右設有一條鋼絲,棚架在豎直方向上架桿之間的距離在3m左右,棚架之間的間距在4m左右,棚架高度大概為1.8m,果實分布在棚架上的平均分布高度在1.5-1.7m左右[6]。
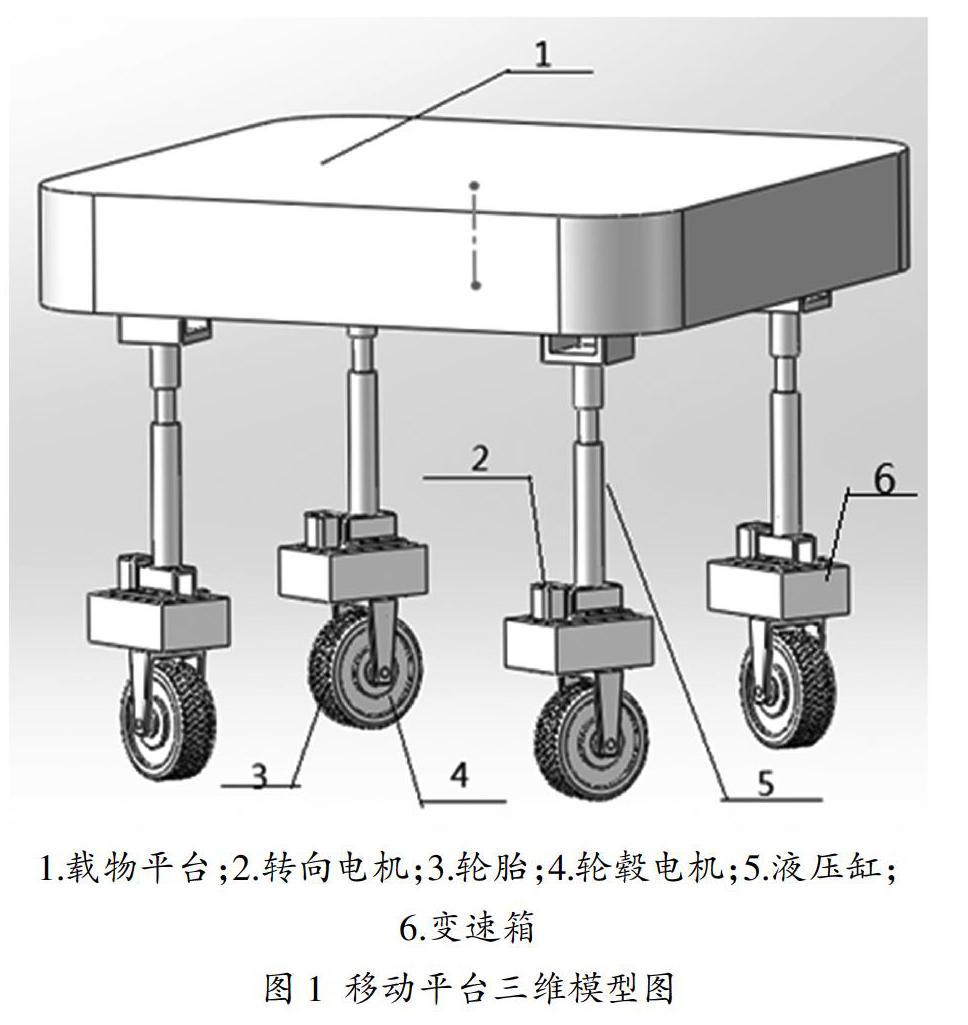
結合獼猴桃種植的基本參數,設計移動平臺左右輪距為1200mm,前后兩軸距為2000mm。每個車輪都應用輪轂電機來為平臺提供動力,每一個輪轂電機都能夠獨立的進行控制,并由四個獨立控制的轉向機構通過轉向電機提供動力來改變車輪方向,再通過控制輪轂電機的轉速大小來控制移動平臺在小面積內的轉彎和原地旋轉。為了使移動平臺能在復雜多變的地面上正常的進行工作,該移動平臺運用四個液壓缸來直接對平臺的水平進行調節,從而能實現在一定坡度范圍內對獼猴桃進行采摘,并且直接運用液壓調節平衡,可在原始移動平臺的基礎上進一步減小平臺尺寸并增大平臺利用率。設計完成的三維模型如圖1所示。
2 移動平臺運動學仿真分析
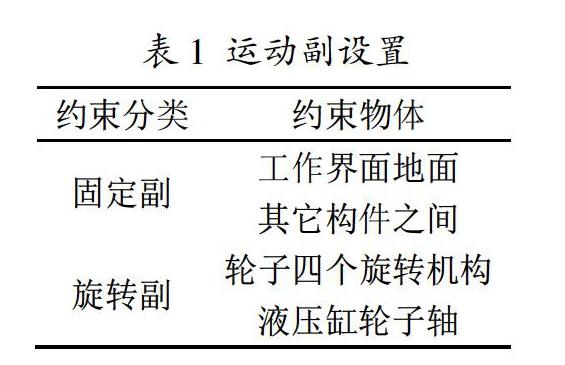
為了驗證移動平臺在實際工作環境下滿載時和空載時的運動性能,采用ADAMS虛擬樣機軟件對移動平臺進行運動學仿真分析。為便于仿真計算,將操控臺、蓄電瓶以及一些標準件轉換成載荷施加給移動平臺。首先,將solidworks建模完成的三維模型以X-T的格式保存后導入ADAMS中;其次,將移動平臺簡化后的三維模型與 ADAMS中的地面模塊進行連接,把地面模塊當做移動平臺的工作平面;然后,將模型的單位與ADAMS統一,并在零部件相應的位置上添加運動副和轉動副以及添加平臺需要承受的載荷;最后,將其他沒有約束的零部件進行固定,使添加了固定副的零部件與平臺構成一個整體。各種約束的設置如表1所示。載荷設置主要針對空載和滿載兩種情況,其中空載時只有移動平臺自重674.5kg,滿載時還需在平臺上加載125.5kg。
完成所有設置后的移動平臺仿真模型如圖2所示,通過對輪轂電機加載不同的驅動值即可進行仿真分析。
2.1 沿X、Y方向平動的運動學仿真
通過調整轉向電機,可使輪子沿X或Y方向運動,故二者的運動規律是一致的,僅需分析其中一種情況即可。以沿X向平動為代表,當?棕1=?棕3=?棕2=?棕4時,移動平臺在Y軸方向上是處于靜止的,移動平臺沿X軸方向橫向移動。當角速度大小為?棕1=?棕3=?棕2=?棕4=?仔/3rad/s時,移動平臺向X軸的正方向移動;當角速度大小為?棕1=?棕3=?棕2=?棕4=-?仔/3rad/s時,向X軸的負方向移動,由此得到X方向直行的理論速度VX約為150mm/s,經過10s后理論位移約為1500mm。
圖3中所示為仿真計算得到的移動平臺在空載和滿載條件下工作時平臺中心在X方向的位移曲線,從圖中可以看出移動平臺的位移情況呈線性,且在經過10s后的運行位移均約為1500mm。因此可知移動平臺空載和滿載對橫移時的位移無影響。
圖4為移動平臺在空載和滿載條件下工作時平臺中心在X方向上的速度曲線,從圖中可看出移動平臺的速度穩定在155mm/s左右波動,但在滿載情況下移動平臺的瞬時啟動速度大于空載,這是因為移動平臺承受載荷變大,移動平臺與地面之間的最大靜摩擦力也隨之變大,在啟動過程中需要的牽引力就會變大。
圖5為移動平臺在空載和滿載條件下工作時移動平臺中點在豎直方向的振動情況,從圖中可看出移動平臺在空載和滿載條件下振動幅值基本一致,但是在滿載條件下的振動中心相對較低,其原因是由于平臺載重的增加。
2.2 沿Z軸旋轉的運動仿真
要使移動平臺沿Z軸方向在原地自旋,調整轉向機構方向,使1、3輪相對,2、4輪相對,令?棕1=?棕2=-?棕3=-?棕4=?仔/3rad/s,圖6為移動平臺在空載和滿載條件下工作時平臺原地旋轉一周時平臺質心的軌跡曲線圖。從圖中可以看出,移動平臺無論是在空載條件下還是滿載條件下原地旋轉一周,質心在X軸和Y軸方向上的位移曲線都沒有明顯的差別,且在X向和Y向上的最大幅值均分別為3.87mm和4.33mm,說明平臺承載對于旋轉運動產生的位移沒有影響,且該移動平臺能夠實現在小面積內原地旋轉的工作方式。
圖7為移動平臺在空載和滿載條件下工作時平臺順時針自旋角速度曲線圖,從圖中可以看出移動平臺在空載和滿載條件下運行時自旋角速度的大小均在10.5°/s左右波動,說明平臺是否載重對平臺的自旋角速度無明顯影響。
圖8為移動平臺在空載和滿載條件下工作時,移動平臺在豎直方向上的振動情況,從圖中可以看出移動平臺無論是否載重其振動幅值均在0.4mm左右波動,從圖中可看出移動平臺在空載和滿載條件下自旋產生的振動幅值一致,且幅值中值均維持在0.4mm的低值,說明該平臺在自旋過程中不會出現明顯的振動。
3 結論
本文針對獼猴桃的果樹生長特點、種植方式和環境因素等多種條件,對應用于獼猴桃采摘機器人的移動平臺進行了總體結構設計,并應用ADAMS軟件對移動平臺進行了運動學仿真。分析結果表明設計完成的移動平臺結構無論在空載還是滿載情況下均能夠滿足平動及轉動工作狀態下的可靠性和平穩性要求。
參考文獻:
[1]Bak T, Jakobsen H. Agricultural Robotic Platform with Four Wheel Steering for Weed Detection[J]. Biosystems engineering, 2004,87(2):125-136.
[2]Nishina, Hiroshige. Development of Speaking Plant Approach Technique for Intelligent Greenhouse[J]. Agriculture & Agricultural Science Procedia, 2015,3:9-13.
[3]N Kondo, M Monta, T Fujiura. Fruit harvesting robots in Japan[J]. Advances in Space Research the Official Journal of the Committee on Space Research, 1996,18(1-2):181-184.
[4]董芒.水果采摘機器人移動平臺的設計與試驗[D].南京農業大學,2016.
[5]紀超,馮青春,袁挺,等.溫室黃瓜采摘機器人系統研制及性能分析[J].機器人,2011,33(06):726-730.
[6]陳子嘯.獼猴桃采摘機器人移動平臺的設計與仿真[D].西北農林科技大學,2016.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23