MEMS慣性測量組合的關鍵技術研究
2020-11-20 06:37:22丁巖松劉毅張迪
裝備維修技術 2020年11期
丁巖松 劉毅 張迪
摘要:對載體驅動微機械陀螺和微機械加速度計共同構成的MEMS慣性測量組合在高轉速環境下的姿態解算、初始對準等內容進行深入研究,通過對國內外現狀的分析,根據MEMS測量組合的特點,給出其關鍵技術的實施方案,通過仿真實驗驗證方案的可行性。
關鍵詞:載體驅動;微機械陀螺;MEMS
引言
隨著MEMS技術的發展,出現了各種微機械陀螺,其體積小,功耗小、應用范圍廣等特點引起了各界研究的興趣。但阻礙其發展的瓶頸是敏感高速旋轉體姿態(自旋、偏航/俯仰角速度,以及偏航、俯仰角度)的傳感器技術,這是涉及旋轉體實用化的核心技術。
新型微電子機械系統(Micro Electro Mechanical System,MEMS)慣性測量組合則以其體積小、重量輕、功耗低、成本低、抗高過載等一系列優勢成為對常規彈藥制導化改造的首選方案【1】。可見,MEMS的研制、開發與應用不僅是我國高新技術產品、國防、航天等領域發展迫切需求的關鍵基礎技術,而且具有十分重要的戰略意義和十分強烈的需求。
1 國內外研究現狀
國內研制的MEMS慣性測量組合主要分為兩種:一是選取國外產品作為核心器件,在此基礎上進行信號處理及外圍電路設計;二是采用國產化器件,獨立進行研制。其中,采用第二種方法設計出來的慣性測量組合以其良好的性價比、小型化、低成本正在成為此領域新的發展趨勢。目前,國產化器件主要采用北京信息科技大學傳感技術研究中心研制的載體驅動微機械陀螺,此新型MEMS 關鍵器件制造技術的研究和開發水平已與國際同步,形成了較全面的硅基新型MEMS 研制能力,并研制出多種MEMS器件樣機。這種載體驅動微機械陀螺不同于一般微機械陀螺,其本身沒有驅動部件,利用旋轉體自旋作為驅動力,與旋轉體共同構成閉環回路慣性系統,其輸出單路載波-包絡信號經過分離解算可以同時得到旋轉體的偏航、俯仰和自旋角速度姿態信息,因此具有三只傳統有驅動結構陀螺的功能。采用載體驅動微機械陀螺和微機械加速度計共同構成的MEMS 慣性測量組合,具有測量精度高、可靠性高和使用成本低(相當于其它慣性測量組合的1/3)等特點,特別適用于高速旋轉體的姿態測控。采用此器件研制的慣性測量組合在體積、質量、功耗上都具有很大的優勢,被稱為是傳統慣性測量組合的一次重大變革。
2 MEMS慣性測量組合的關鍵技術
2.1 MEMS慣性測量組合在環境下的姿態解算
采用由載體驅動微機械陀螺和微機械加速度計共同構成MEMS慣性測量組合,在高轉速環境下實現常規彈藥制導。MEMS慣性測量組合的關鍵組成部件——載體驅動微機械陀螺【2】,與旋轉體共同構成閉環回路慣性系統,其輸出單路載波-包絡信號包含了旋轉體的飛行姿態信息,對其進行分離、解算,從而得到旋轉體的偏航、俯仰和自旋角速度。
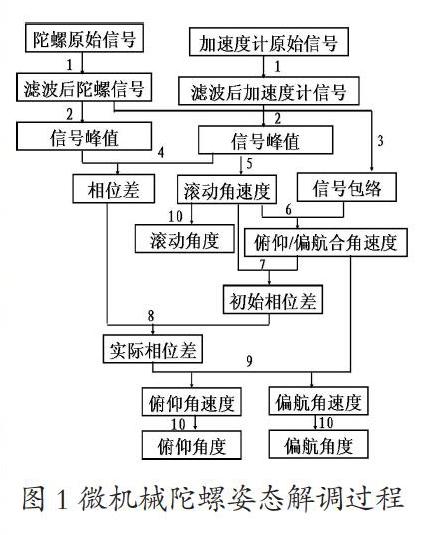
對微機械陀螺信號進行頻譜分析,可以得到旋轉飛行載體的滾動角速度,或者利用加速度計信號求取滾動角速度,因為兩者相等;輸出信號的包絡的幅值可以求取俯仰和偏航的合角速度,而俯仰和偏航的夾角恰好等于微機械陀螺信號和加速度計信號的相位差【3】。因此,微機械陀螺解調出旋轉飛行載體滾動、偏航和俯仰角速度的算法過程如圖1所示。
其中:
(1)求濾波算法;
(2)求信號峰值算法;
(3)求包絡算法;
(4)求兩信號的相位差算法;
(5)求滾動角速度算法;
(6)抑制滾動角速度變化時對輸出信號影響,求解俯仰和偏航合角速度;
(7)相位差復合建模補償算法;
(8)實際相位差求解算法;
(9)偏航角速度和俯仰角速度求解算法;
(10)滾動、俯仰和偏航角度求取算法。
微機械陀螺信號經過預處理電路以后,仍會有很大的噪聲。因此,在進行信號解調之前,要對信號進行平滑濾波。常見的濾波算法如:小波濾波算法、IIR濾波算法、FIR濾波算法、自適應濾波算法、卡爾曼濾波算法、零相移濾波算法等【4】。通過各種濾波算法濾波前后信噪比的比較,部分算法濾波后相位發生偏移或者誤差較大。其中,零相移濾波算法沒有這兩個弊端,在微機械陀螺信號濾波中常被采用。
2.2 MEMS慣性測量組合的初始對準
應用于常規彈藥制導化改造中的MEMS慣性測量組合系統屬于捷聯式慣導系統,其初始對準的目的是確定姿態矩陣的初始值。對準的精度和時間是初始對準時的兩項重要技術指標,對準精度影響慣導系統的性能,對準時間標志著快速反應能力,因此要求初始對準精度高、對準時間短,即:精而快。為了達到這一要求,通常要求陀螺和加速度計具有高精度和穩定性,系統的魯棒性要好,對外界的干擾不敏感。
2.3 MEMS慣性測量組合的誤差分離與補償
為滿足彈道修正應用,必須提高MEMS慣性測量組合的測量精度,極大程度降低系統測量誤差【5】。因此要對系統產生的誤差進行分析和處理。
3 仿真實驗
實驗測試在MEMS傳感器三軸精密轉臺進行,它可在地面實驗條件下模擬飛行體空間運動規律。其中內框模擬飛行體旋轉,中框和外框轉臺分別模擬俯仰和偏航,可以實現模擬飛行體自轉、俯仰、偏航三維運動。通過采集卡,可以記錄飛行體三維姿態作為飛行體姿態基準信息,陀螺輸出的飛行體信息進行比較。以驗證信號解調的可靠性、適應性。根據轉臺的工作條件, 可以確定轉臺運動狀態方程。
4結束語
MEMS慣性測量組合有重要的科學意義和應用價值。利用旋轉載體自身角速度作為驅動力,從而構成沒有驅動電路及其驅動梁的硅微機械陀螺,其原理正確。針對載體驅動微機械陀螺輸出信號解調這一難點問題,基于對信號處理電路和輸出波形的分析,給出了可供參考的算法。
參考文獻
[1]吳立鋒, 嚴慶文. 高速旋轉飛行體姿態傳感器信號解調方法[J]. 傳感器與微系統,2010(6):28-31.
[2]張富強,嚴慶文. 無驅動結構硅微機械陀螺的原理分析和性能測試[J]. 儀表技術與傳感器,2009年增刊:16-24.
[3]方靖,商捷,顧啟泰. 微機械陀螺隨機誤差建模的實驗研究[J].傳感技術學報,2008,21(9):1514-1518.
[4]張福學,張偉.五驅動結構微機械陀螺及其應用[M].國防工業出版社. 2013
[5] Daniel Lapadatu, Bjφrn Blixhavn, Reidar Holm and Terje Kvisterφy. SAR500-A High-Precision High-Stability Butterfly Gyroscope with North Seeking Capability, 2010 IEEE.
