激光界限裝置視覺方案
2020-11-20 23:57:34張昕
裝備維修技術 2020年11期
張昕
摘 要:本文對軌道車輛限界的檢測進行了一定的論述,并根據檢測要求設計了激光界限裝置,有助于提高軌道車輛限界檢測的檢測精度,進而確保行車安全。
關鍵詞:激光界限裝置;視覺;輪廓檢測
1 前言
軌道車輛限界是指按照鐵道部規定,為確保鐵路車輛的正常運行及安全因素,對車輛接近建筑物或者任何設備的時候,不允許超過輪廓尺寸線。機車車輛的任何部位,在任何情況下均不得超出機車車輛限界規定的尺寸。城軌車輛限界的檢測方法主要是通過獲取車輛外部輪廓(包絡線)獲得,城軌車輛運行過程中某一時刻與軌道中心線垂直的一個截面輪廓為車輛該截面的最大輪廓,對車輛運行過程中的所有截面輪廓疊加出的最大輪廓即為該車輛的界限。因此,為了確保軌道車輛的安全行駛,就要對其車輛界限進行準確的測量,并根據檢測結果采取有針對性的調整措施,進而保障車輛形式過程中的安全。
2 軌道車輛的限界檢測
2.1 軌道車輛限界檢測特點
軌道車輛限界檢測結果的真實性與截面輪廓的采樣密度(對應每一個截面)、采樣頻率(對應每一時刻)及檢測系統精度都密切相關,結合城軌車輛的特點進行分析,可將城軌車輛限界檢測的特點歸納為:動態、大尺寸、高精度。
2.2 檢測系統技術指標要求
(1)檢測范圍:最大寬度≥3400mm,最小寬度≤2600mm,最大高度≥5030mm,最小高度≤3620mm,檢測長度≥37000mm;
(2)X、Y、Z三個方向的測量誤差:≤±1mm;
(3)超限界定位誤差:≤±10 mm;
(4)工作環境溫度:-5~45℃;
(5)工作環境濕度:95%以內,無凝結;
(6)供電:三相電源:AC380V±10%,(50±1)Hz;單相AC220V±10% ,(50±1)Hz;
(7)測量截面間隔距離:≤3mm;
(8)龍門框架寬度:≤4800mm,龍門框架高度:≤6000mm;
(9)檢測速度:≤1.5km/h (非勻速運行)。
3 激光界限裝置
3.1 激光界限的檢測原理
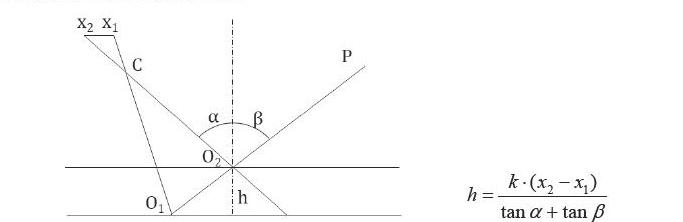
激光界限裝置采用了3D結構光的檢測技術,通過激光發生器對被檢測物投影一條直線,攝像頭以一定的角度觀察這條線。當物體的形狀和位置發生變化時,這條投影的激光線也會發生偏移,通過檢測圖像中該線的偏移量和形狀的變化,計算物體的形狀和位置的變化。
通過三角測量法及有效的標定方法,可以把這個形變量和實際物理空間的變化量所對應起來,從而獲得被檢測對象的空間位置信息。
深度計算方法:C為攝像機,P為投影器,當觀測物O的深度發生變化時,在相機中觀測到的像素坐標x1、x2,通過相機和投影器的角度關系,可以計算出物體深度變化的數值。其中k為通過標定的方法獲得的比例系數。
3.2 激光界限裝置的結構組成
(1)三維激光輪廓傳感器
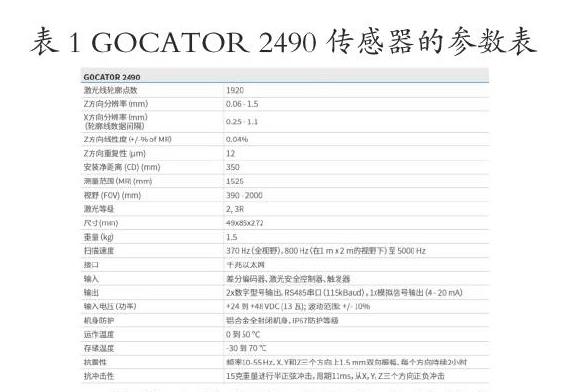
Gocator是加拿大LMI Technology公司的3D激光檢測系統產品,其具有高性能和使用便利的特點,并且還能為客戶帶來良好的經濟效益。根據本文的技術要求,選用GOCATOR 2490型號的傳感器,其所具有的特點主要有:2米掃描視野和超深測量范圍,可覆蓋1米×1米的超大掃描區域; XYZ方向綜合分辨率達到2.5mm,以2米/秒的生產速度 進行完整的尺寸測量(寬×高×深);Z方向分辨率達0.06mm,用于精密高度測量,其具體的參數如下表所示。
(2)Gocator 三維激光輪廓傳感器產品的優勢
1)組網同步功能
采用LMI Master Hub可實現多相機組網功能,并通過同步器,同時觸發,保證所有相機能夠在同一個時刻準確的測量物體的截面尺寸。避免因為物體運動過中檢測造成相機觸發不同帶來的測量誤差。
2)校正補償功能
Gocator三維激光輪廓傳感器提供的結構光位置校正功能,可以對結構光的投影位置做修正,大大降低標定的難度,同時對機械安裝的要求更低,可以采用固定式的安裝方式,放棄了使用滑臺調整機構,降低不確定性和不可靠性 ,大大提高檢測數據的穩定性。
3)軟硬件濾波
Gocator三維激光輪廓傳感器提供了特定波長光波的濾鏡,同時接合軟件的濾波算法,在硬件和軟件上實現對干擾的抑制,保證檢測的穩定性,降低誤報率。
4)輪廓拼接技術
采用輪廓模式,可以提取整個測量區域內的輪廓。并通過傳感器級聯的方式,把所有的輪廓點拼接成一個完整的車型截面的輪廓,更準確的還原車體的真實尺寸情況。
5)完整車型檢測
采用更大視野的3D相機,可以覆蓋更多的檢測區域,按照最大車型,采用14臺相機可以實現整個車體外輪廓的數據提取,實現整車的輪廓尺寸檢測。
6)自動標定
該傳感器的一個核心關鍵點是通過3D相機的數據整合到一個坐標系中,因此需要對所有的相機做空間位置的標定,標定需要對整個輪廓做統一的標定,因此需要相機同時檢測同一個標準物體,通過匹配激光線在標定塊上的位置來實現坐標的統一。增強的軟件功能,可以自動去計算每個標定的結果來統一計算坐標變換的矩陣。可以實現所有相機參數的自動標定。
7)實時測定結果
整列車通過后,采用高速計算機,對每個截面的最大界限范圍進行計算,同時立刻給出當前檢測截面檢測結果,如果超差給出報警信號,告知此處有偏差。同時記錄下來每個截面的采集時刻及位置。最后整列車檢測完成后,對這些截面的數據進行拼接,給出完整車輛的車型數據。
4 結語
總而言之,激光界限裝置具有非常優良的檢測性能,有助于提高軌道車輛限界得檢測精度,進而為行車安全提供科學合理的依據,促進軌道車輛行駛安全水平的不斷提高。
參考文獻:
[1] 王鐵成, 李玉龍, 徐練, 等. 軌道車輛動態限界測試系統設計[J]. 中國測試, 2020(05):77-78.
[2] 周博, 王楓. 復雜工況下地鐵車輛限界精細化分析[J]. 大連交通大學學報, 2018(04):101-102.
[3] 年悅, 張濟民. 懸浮型有軌電車垂向車輛限界算法研究[J]. 齊齊哈爾大學學報(自然科學版), 2018(05):42-43.
