eLoran系統新型數據調制/信道編碼方案設計與評估
2020-11-18 06:06:38李婉清王建輝李實鋒傅其祥
全球定位系統 2020年5期
李婉清, 王建輝, 李實鋒, 傅其祥
(1. 中山大學,廣東 廣州 510006;2. 香港應用科技研究院,香港 999077;3. 中國科學院國家授時中心,陜西 西安 710600)
0 引 言
羅蘭(Loran)系統于1958年開始提供服務,是區域性、低頻以及高功率的導航系統[1].這些特性是Loran系統成為全球衛星導航系統(GNSS)備份系統,并且在定位、導航、授時方面得到應用的重要因素[2].
增強型羅蘭(eLoran)系統相較于Loran-C系統主要的升級是數據調制方式,即羅蘭數據信道(LDC)[3-4].LDC具有以下三大職能:1)高速Loran數據傳輸信道(HS-LDC),輔助其他系統的修正量傳輸任務;2)第9脈沖通信(NPC),通過僅對附加調制脈沖進行調制的方法最小化導航脈沖所受到的干擾;3)可升級Loran調制(SLM),滿足不同接收機所需求的傳輸周期來調整數據的傳輸率.
eLoran面臨新一輪的技術升級,數據信息的播發功能待進一步完善.2018年9月,美國國際自動機工程師學會發布了3個關于eLoran系統的標準,其中包括第9脈沖調制的eLoran信號發射標準(SAE9990/2).可見,第9脈沖調制方式能夠有效實現數據傳輸的升級.此外,還有研究人員對新型的調制方式開展研究,仿真實驗證明了新型調制方式加快數據傳輸的可能性[5-6],但并未對性能進行評估.
本文提出了一種滿足更大數據傳輸率的數據調制方式,相應地采用LDPC編碼實現更大編碼增益,相關實驗結果可以為實現eLoran系統的數據傳輸提供高效、可靠的傳輸性能提供一定的理論參考.本文首先給出目前eLoran系統數據通信的基本原理,并對其中所采用的調制、編碼方式進行論述.接著重點介紹本文提出的新型數據調制、信道編碼的方案,詳細論述具體實施步驟與算法.
1 eLoran數據通信
1.1 原理
LDC采用標準Loran-C信號作為數據通信最小單元,以Loran-C脈沖組為數據傳輸載體,并通過不同的調制方式滿足導航系統修正量、信號完好性等信息傳輸的要求,作為地面增強系統以彌補GNSS的脆弱性.文獻[7]詳細介紹了Loran-C數據通信的組成結構.
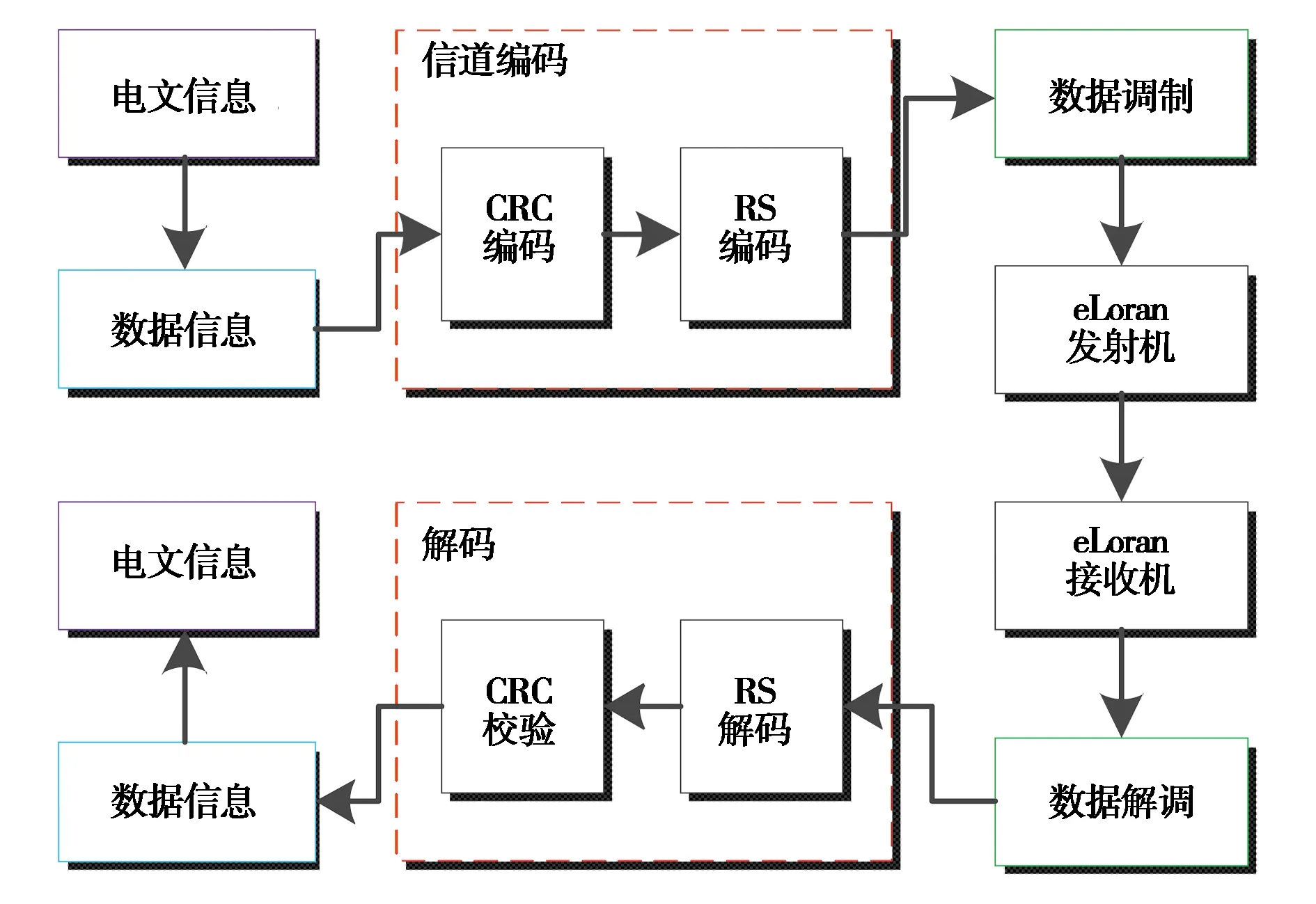
圖1 eLoran數據通信組成框圖
圖1所示為eLoran系統的數據通信原理.其中,eLoran系統利用Loran-C信號脈沖組調制數據信息,并采用抗干擾能力強、糾錯能力強的編碼方式.下面對eLoran系統采用的數據調制技術與編碼技術進行詳細介紹.
1.2 數據調制技術
在Loran-C脈沖信號的相位編碼基礎上,eLoran系統通過附加調制方式實現數據的傳輸.自2003年以來,提出了多種eLoran數據通道的調制方式,常用的調制方式有以下三種[8]:
1)三態脈沖位移字平衡調制(PPM):信號由8個脈沖組成,第1和第2個脈沖需保留閃爍報警功能,故僅對第3~8個脈沖進行時延上的平衡調制,調制步長為1 μs,共有三種調制狀態,每個脈沖組代表7 bit信息.PPM調制對系統控制要求較低,易于信號的收發處理.另外,eLoran LDC中提出改進的PPM技術,即32態PPM調制,傳遞的信息量為5 bit/脈沖[6].
2)脈沖頻率調制(IFM):eLoran信號的工作頻率在90~110 kHz,通過對單個脈沖的頻率進行調制產生不同的相位差,進而產生不同的信號模式.注意,頻率與相位的調制需要在30 μs進行.通常采用4級、16級調制,分別傳遞數據量為12 bit/脈沖組、24 bit/脈沖組.
3)額外脈沖調制(SIM):eLoran脈沖組內脈沖間隔為1000 μs,將脈沖間隔縮短為原來的一半,可增加8個脈沖,共播發16個脈沖.除了前面兩個用于閃爍報警的脈沖,共有14個脈沖可用于調制信息,并且可以采用多種方式在信號上調制信息.
目前采用的調制方式數據率較低,調制數據有限,亟需探尋具有更高傳輸數據率的調制方式.
1.3 編碼技術
eLoran數據編碼采用不同編碼完成不同類型錯誤的糾錯功能.為保證數據的完整性,在數據信息生成后添加循環冗余校驗碼(CRC).CRC碼是一種應用廣泛的差錯校驗碼,在eLoran系統中信息字段為56 bit,校驗字段為14 bit.然后采用RS(Reed-Solomon)糾錯編碼加強傳輸信息的抗突發干擾性能,如RS(30,10)最多可以糾正10個脈沖組重復周期內的錯誤[9].RS碼需具備精確的幀同步,當信道狀態較差時,性能隨之變差.采用具有更高編碼增益的編碼方式能夠大大改善數據通信的質量,提高抗干擾能力.
通常,eLoran系統一幀信息長度為210 bit,其中56 bit為通信數據、14 bit為CRC校驗碼和140 bit為RS糾錯碼.
2 新型數據調制方案
2.1 數據傳輸脈沖調制
2.1.1 調制方案
本方案采用脈沖編碼信號體制,編碼方式、脈沖間隔與eLoran系統相同,接收機通過與eLoran相同的同步方法可建立時間與頻率同步.為了實現數據傳輸,可通過在副臺增加數傳脈沖實現.增加額外脈沖的調制方式能夠提高數據率[4],但發生交叉干擾的可能性增加,且需要升級接收機以區別導航脈沖與調制脈沖.增加第9脈沖是一種對接收機影響最小[4]、且容易去掉交叉干擾的特殊SIM調制方式.為了不影響原脈沖組的性能,增加的脈沖還需保持在現有的eLoran信號周期內.以下分析中以副臺增加一個脈沖為例展開.
每個脈沖組包含9個脈沖,主臺與副臺第9個脈沖的位置不同.即主臺第9個脈沖與前一個脈沖的間隔為2 ms,副臺第9個脈沖與前一個脈沖的間隔為1 ms.副臺第9個脈沖用于調制信息,區別于導航脈沖,不參與副臺的相位編碼調制.為提高信息傳輸速率,將第9個脈沖的持續時間延長250 μs,其表達式為
S9(t)=
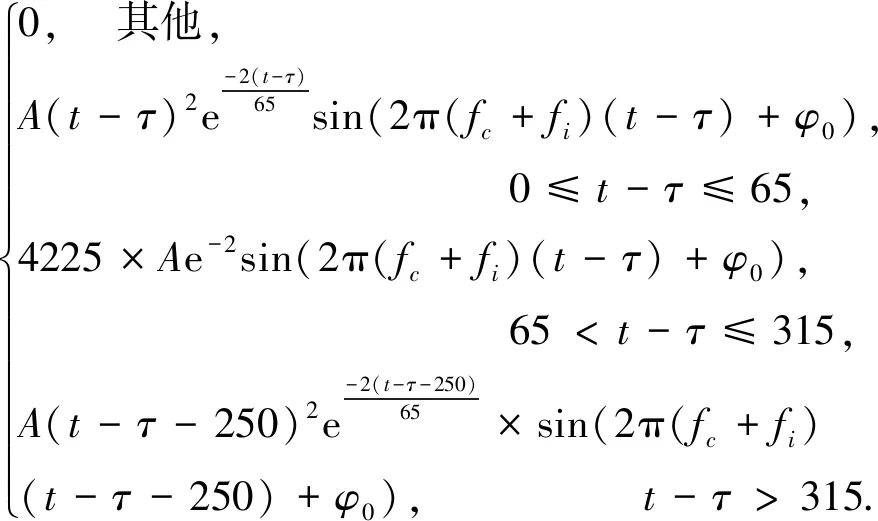
(1)
式中:t為時間,μs;fc為載波頻率,fi為當前脈沖相對于載波頻率的偏移,kHz;φ0為載波初相;τ為時延,μs.
根據Loran-C信號的工作帶寬(介于90~110 kHz),fi的變化范圍初步設置為-8~6 kHz,數學歸納為
fi=(2i-8) kHz,0≤i≤7.
(2)
載波頻率偏移共8種狀態,可映射為3個二進制比特.
初相φ0取值共有0、π/2、π、3π/2四種,可映射為2個二進制比特.
時延τ的取值為0或250,共2種狀態,可映射為1個二進制比特.
通過對頻率、初相和時延的調制,每個數據脈沖可傳輸6 bit信息.
加入數傳脈沖后的脈沖組如圖2所示,每個副臺的脈沖組包含9個脈沖,其中最后一個脈沖用于數傳,其持續時間比用于測量的脈沖長250 μs.注意,全文所采用的單脈沖仿真信號采樣頻率均為2000 kHz,時域持續長度為1000 μs.
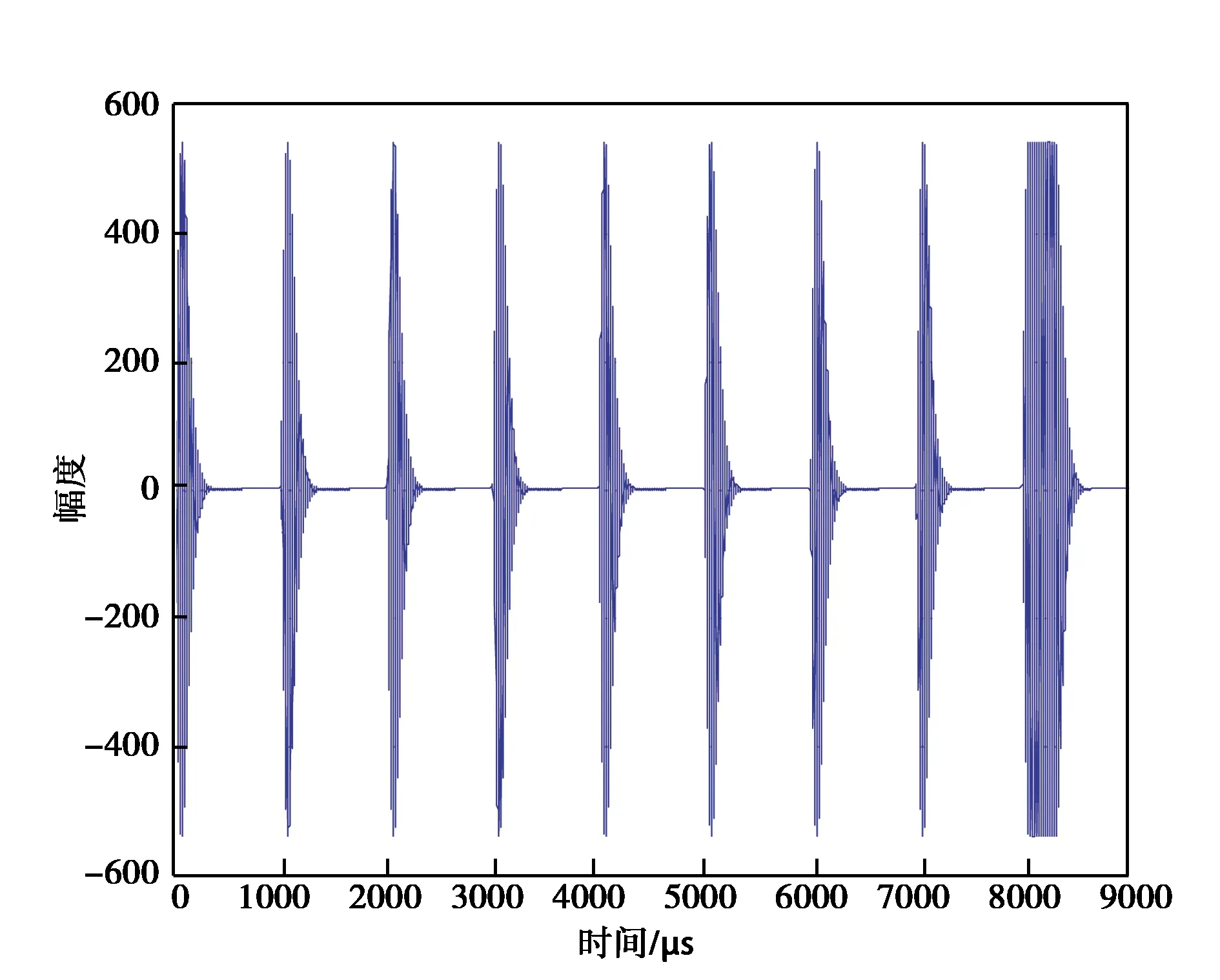
圖2 增加副臺第9脈沖示意圖
上述數據傳輸方案下,每個副臺脈沖組每次均能傳輸6 bit信息.GRI周期按40~100 ms計算,若采用1/4碼率的信道編碼,單個副臺的信息傳輸速率可達15~37.5 bps.采用較長信息分組時,可考慮將編碼效率提高到1/2,單個副臺信息傳輸速率可達30~75 bps.
2.1.2 性能評估
四種初相導致的錯誤概率與正交相位鍵控(QPSK)調制方式相同.下面主要分析時延和頻率調制的性能.兩種時延下的信號波形如圖3所示.若接收信號的真實時延為0,則時延為0和250的本地信號與接收信號的相關值相差約9.6 dB,由此造成的錯誤判決概率可忽略.信號相關函數計算方式如式(3)所示.

(3)
式中:R為相關函數,為時移τ的函數;N為信號時域總長度;x1(n)與x2(n)為信號表達式.特別的,當τ=0時,信號的自相關函數即為信號能量.
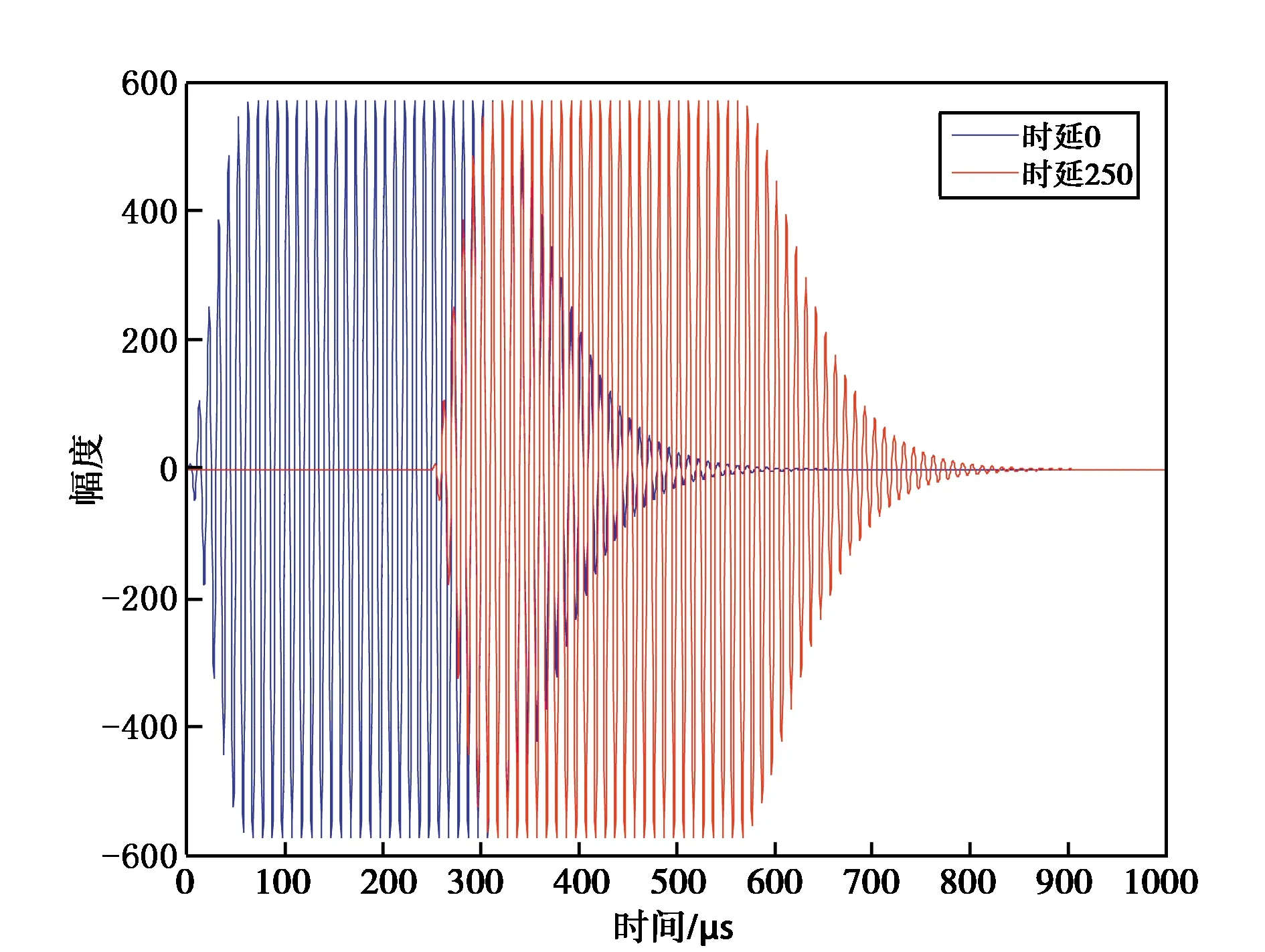
圖3 時延為0和250的信號脈沖示意圖
對于頻率調制,相鄰頻點之間的錯誤判決概率較大,以下僅分析相鄰頻點的情況.相鄰頻點的間隔為2 kHz,頻譜如圖4所示.若接收信號的真實頻率為100 kHz,本地參考信號頻率為100 kHz和102 kHz時,兩者分別與接收信號相關結果相差約9.5 dB,由此造成的誤判概率較小.

圖4 第4、5相鄰載波頻率偏移的頻譜圖
2.2 數據脈沖分組調制
2.2.1 增加數據脈沖分組
通過時分方式在部分脈沖分組內調制數據信息,其余脈沖分組則用于測量.采用這種方式會降低測量精度,但可以實現較高速率的數據傳輸.對于同一個副臺的信號,設每3個脈沖分組中有1個用于數據傳輸,用于測量的信號脈沖組數量降低為原來的2/3,對應的測量通道信噪比(SNR)下降約1.8 dB.時間與頻率同步可通過測量通道獲得,用于數傳的脈沖組的8個脈沖可全部調制數據信息,其波形如圖5所示.
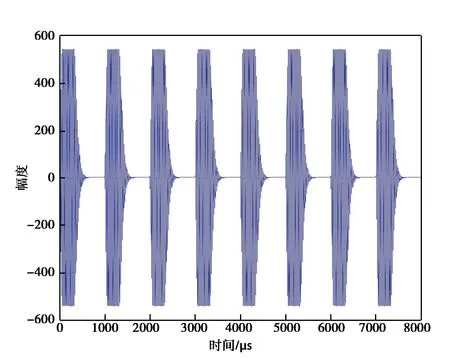
圖5 數傳脈沖組示意圖
若數傳脈沖組的每個脈沖采用2.1節中介紹的調制方法,每個脈沖可傳輸6 bit信息,每個脈沖組共可傳輸48 bit信息.采用1/4碼率的信道編碼時,單個副臺的信息傳輸速率為40~100 bps;采用1/2碼率的信道編碼時,單個副臺的信息傳輸速率為80~200 bps.
2.2.2 增加時延調制階數
將備選的數據脈沖時延由0 μs和250 μs兩種狀態,增加到0,a,2a,3a,…,(N-1)a共N種狀態.若限制時延最大值不超過256 μs,當a=1時最多可容納256種狀態,可映射為8 bit;當a=256時,可映射為1 bit.根據性能要求,可將a的取值在1~256進行折中.a的取值越大,調制性能越好,但傳輸速率也越低.
3 信道編碼
3.1 編碼方案
針對新型調制方案,本文采用信道編碼方案實現更高編碼增益,提高數據傳輸的抗干擾能力.與傳統的信道編碼相比,LDPC[10]與Turbo碼[11]采用基于概率譯碼的迭代譯碼算法,可以獲得更高的編碼增益.由于LDPC碼不存在專利保護,本文采用LDPC碼作為信道編碼方案.為了在較短的信息分組長度下獲得足夠的編碼增益,LDPC碼的編碼效率初步設定為0.25.

H2為
每個子矩陣的維數129×5(或129×3、129×4,根據信息分組長度選擇),Hi,j的每一行要么為全零,要么只含一個‘1’.分別將H1,1,H1,2,…,H1,43的每一行循環右移1位可得到H1矩陣的第二行子矩陣,循環右移2位可得到H1矩陣的第三行子矩陣,…,循環右移6位可得到H1矩陣的第七行子矩陣.
3.2 譯碼算法
對應地,下文詳細論述LDPC譯碼算法.

譯碼器采用迭代方法逼近最大似然譯碼,一般情況下迭代100次可確保譯碼器性能.根據具體應用場景可修改算法的迭代次數,SNR越高譯碼器收斂到正確碼字所需的平均迭代次數越少.以下算法步驟介紹中,設譯碼器的最大迭代次數為Iter-Max,每個碼字信息位個數為K.
最小和算法的計算步驟:
1)初始化

2)校驗節點更新

第j個校驗節點傳給第i個變量節點的軟信息為
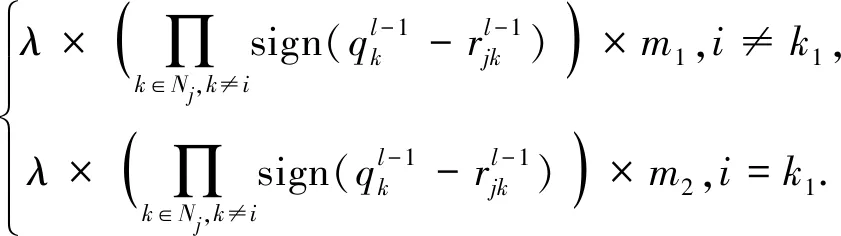
(4)
式中,λ為歸一化系數,值一般為0.8.
3)變量節點更新
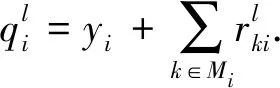
(5)

4)Iter-Max次迭代后進行硬判決,并輸出信息位
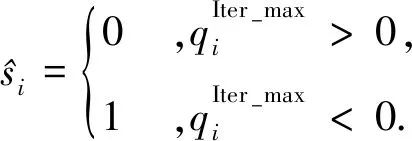
(6)

3.3 性能仿真
現在的數據通道信息的分組長度為70 bit(含14 bit CRC碼),為了提高編碼增益,在新體制的幀結構設計中可考慮適當增大幀長.下面分別仿真了信息分組長度為129、172、215、258和301時的誤碼率性能,如圖6所示,其中假設信道為理想加性高斯白噪聲信道(AWGN).
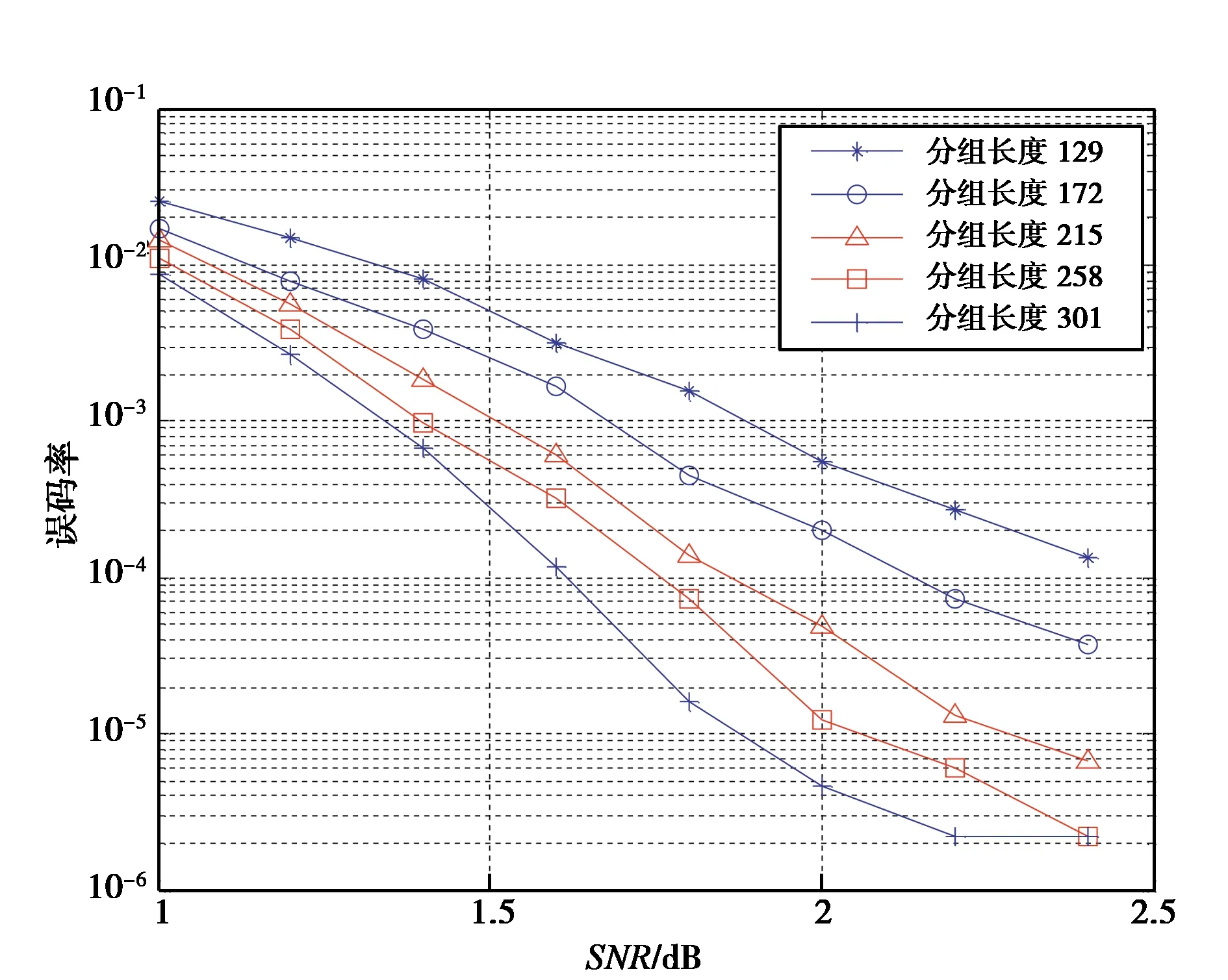
圖6 不同分組長度對應誤碼率性能
若誤碼率指標為10-5,分組長度為215時的編碼增益約為7.3 dB,分組長度為258時的編碼增益約為7.5 dB,分組長度為301時的編碼增益約為7.7 dB.信息分組長度大于等于215時,信息分組長度每增加43,編碼增益增加約0.2 dB;信息分組長度小于215時,編碼增益下降速度變快.因此,信息分組長度設置為215,可以較好地兼顧信息分組長度和編碼增益.
4 結 論
本文針對eLoran系統提出了新型的數據調制,并詳細論述了LDPC編譯碼方案用于該系統的可行性.新型脈沖組調制保證測量精度下增加數據傳輸速率且錯誤概率較小;另外建立僅用于數據傳輸的脈沖分組可大大提升傳輸速率.為實現更高編碼增益,采用LDPC編碼,通過性能仿真以及平衡編碼增益與數據通道信息幀長之間的約束,初步得出了適用于eLoran系統幀長的理論最優值.本文提出的新型調制、編碼方式的研究停留在仿真階段,有待在硬件平臺上開展下一步研究.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32