基于BDS的水質檢測仿生魚控制系統設計
2020-11-18 06:06:38崔秀芳李培培石福孝王宏宇陳剛
全球定位系統 2020年5期
崔秀芳,李培培,石福孝,王宏宇,陳剛
(上海海洋大學 工程學院,上海 201306)
0 引 言
北斗衛星導航系統(BDS)是我國自主建設、獨立運行的全球衛星導航系統(GNSS),2019年11月5日01時43分第四十九顆北斗導航衛星的成功發射,標志著BDS全球組網新時代的開啟.BDS以它特有的雙向短報文通信功能的優勢逐漸廣泛應用在不同領域[1].
仿生機器魚在水下具有與其他推進器的水下機器人更加優良的游動能力和強大的環境適應能力[2],針對水下作業,仿生機器魚成為研究熱點[3].現在水環境保護問題日益受到重視,環境保護關鍵要對水環境狀況做評估.傳統水質檢測主要有通過人親自到目的地采集水質樣本進行檢測[4]和通過遠程監控中心和串行通信方式進行檢測的方式,以上方式存在布線困難、投入成本較高、水下采集的數據難以實時上傳到上位機等缺點[5].
本文基于BDS設計了一種可用于水質檢測的仿生魚控制系統,基于BDS特有的短報文通信功能來實現遠程實時監測水質的目的.該系統有實時性好、便攜、投入成本低、節省人力等優點.
1系統總體設計
1.1 控制系統功能
基于BDS的水質監測仿生魚由于要對不同采樣點和不同深度的水樣進行采集,所以需要其可以完成水下自由游動,能夠準確地控制行進速度和轉向角度,實現安全避障和定深作業.然后采集水質信息并將水質檢測的數據和采樣點位置和采集時間信息通過BDS傳送給上位機顯示,以供工作人員查看.
1.2 控制系統總體設計
仿生魚控制系統總體結構如圖1所示,控制系統主要由主控制器、數據信息采集模塊、BDS用戶端機、舵機控制模塊、電源模塊組成.整個系統的核心部分為STM32主控制器,處理采集到的障礙物和深度信息用于自身的運動控制,處理采集到的水質信息通過RS232串口線傳送給BDS模塊,在仿生魚上浮露出水面時,BDS模塊將水質檢測數據和時間位置信息一并通過BDS衛星傳輸到遠程監控中心進行顯示.
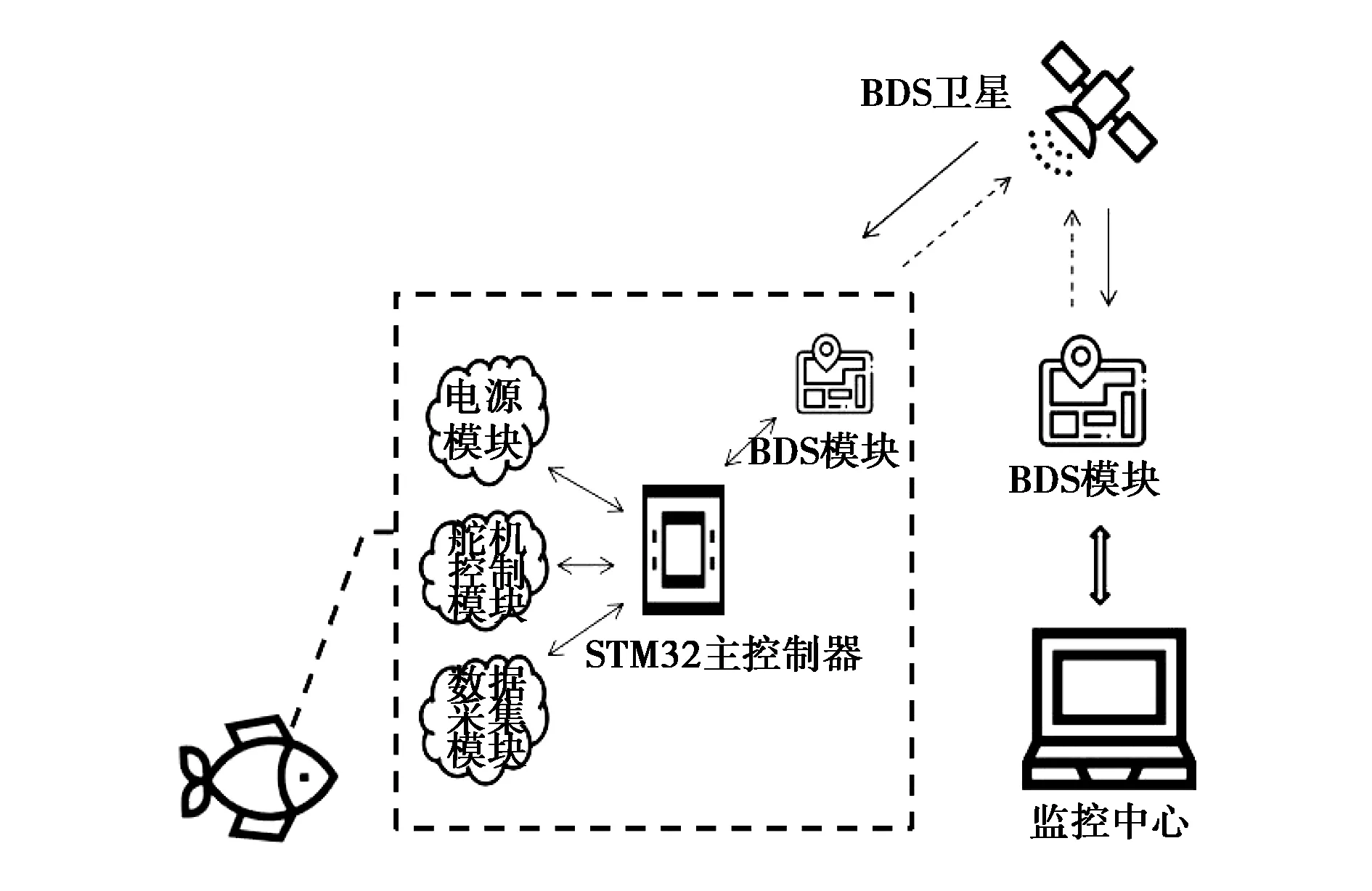
圖1 系統總體結構圖
2 系統硬件設計
根據功能需求,設計仿生魚控制系統的硬件部分,該系統主要是由ARM微處理器、水質檢測模塊、BDS模塊、紅外測距傳感器、深度傳感器、舵機模塊、電源等組成,硬件設計的模塊組成框圖如圖2所示.
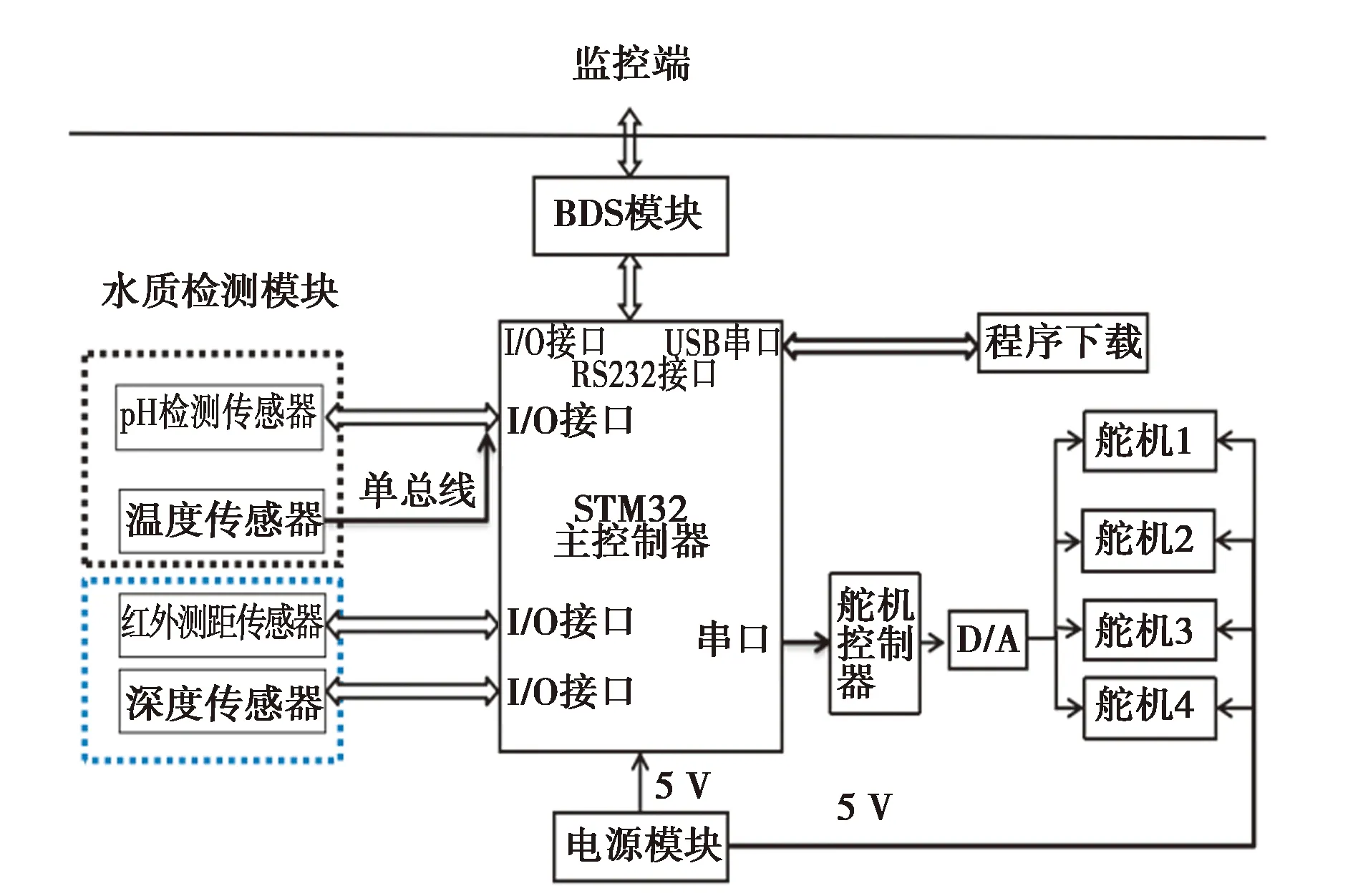
圖2 仿生魚硬件組成框圖
2.1 ARM處理器
該系統主控制器選用ALIENTEK探索者STM32F4開發板,如圖3所示.該開發板是基于ARM Cortex-M4內核的STM32F407ZGT6處理器,該芯片有112個通用I/O口,由P2和P12端口的6個排針組成的多功能端口可以實現ADC采集、DAC輸出和PWM DAC輸出,可以滿足系統使用.自帶的RS232可以連接BDS模塊進行串口通信.

圖3 STM32F4開發板
2.2 BDS通信模塊
BDS模塊選用深圳市容輝信息科技有限公司研發和設計的BDS短報文開發板,該BDS核心板帶RD模塊和定位模塊,RD模塊性能高短報文的通信成功率高,定位模塊集成了UBLOX8代芯片、SAW、LNA,定位精度高,不僅支持BDS定位,還支持GPS和GLONASS定位.而且該BDS模塊具備 TVS 防護的電源輸入和ESD防護卡座接口,安全性高.使用時,BDS模塊的RX和TX輸入輸出接口,與主控制器采用RS232串口通信,波特率默認為115200,將天線的RX與BDS模塊的RX相連,天線的TX與BDS模塊的TX相連天線的RNSS電纜連接BDS模塊的RNSS引腳即可,圖4所示為BDS模塊核心板和BDS天線.RD 模塊遵循 RDSS 2.1協議[6].

圖4 BDS模塊核心板(左)和天線(右)
2.3 水質檢測模塊
水質檢測模塊包括溫度傳感器和pH值檢測傳感器.pH值檢測傳感器模塊實物圖如圖5所示,工作電壓為5 V,檢測范圍為pH0~pH14,pH值檢測傳感器模塊的串口輸出RX、TX可直接與主控制器自帶USB串口連接進行通信.BNC接口用來連接pH值電極,帶有DS18B20溫度控制器接口.DS18B20工作電壓為3~5.5 V,測溫范圍:-55℃~125℃.

圖5 pH值檢測傳感器模塊
2.4 外圍設備
紅外測距傳感器模塊采用紅外測距傳感器GP2Y0A21YK0,引腳VCC接主控制器5 V電壓輸出,引腳GND接地線,Vout模擬電壓輸出引腳接主控制器A/D轉換通道的引腳.
深度傳感器選用MEAS瑞士分公司生產的MS5803-14BA微型壓力傳感器,本系統采用IIC通信方式與主控制器進行通信.
選擇LSC系列控制提供多路PWM信號輸出控制舵機轉動,控制板采用串口通信,通信波特率為9600,3.3 V供電.舵機選用為9 g舵機,工作電壓為4.8 V[7].
3 系統軟件設計
3.1 下位機設計
本系統軟件設計在Keil μVision軟件中使用C語言對STM32控制器進行編程[8],通過USB串口將程序下載到STM32控制器里.首先進行系統初始化,包括和各個模塊初始化,然后配置主控制器各個端口各個模塊.通過控制PWM占空比使舵機轉動控制仿生魚的前進、轉向、下潛等動作,到達指定地點利用深度水質檢測模塊并采集數據,采集結束仿生魚上浮露出水面,BDS模塊與上位機進行通信,圖6是下位機的程序流程圖.

圖6 下位機的程序流程圖
系統設計采用模塊化編程,各模塊程序編寫完成后,在main函數中調用即可.以舵機模塊為例,使用C語言編寫包括程序初始化、舵機ID寫入和舵機轉動等程序,以下是舵機控制部分程序:
{
SystemInit();
delay-init(72);
NVIC-PriorityGroupConfig(NVIC-PriorityGroup-2);
uartInit(115200);
while (1)
{
LobotSerialServoMove(ID1, 100, 500);
LobotSerialServoMove(ID2, 300, 500);
delay-ms(1000);
…
上述為初始化程序,包括系統時鐘初始化、延時初始化和串口初始化,以及優先級設置和舵機轉動部分程序.
3.2 BDS通信模塊設計
仿生魚系統中BDS通信模塊流程圖如圖7所示,BDS模塊初始化為串口初始化,設置波特率,字長,奇偶校驗等參數,調用函數USART-Init,命令符“USART-Init(USART1,&USART-InitStructrure)”來實現串口初始化.串口初始化后,主控制器STM32給RD模塊發送 “$CCDWA,0000000,V,1,L,,0,,,0*65 ” 指令請求定位,BDS短報文2.1協議規定收發語句皆以符號“$”開始,以英文字符“,”和“*”為分隔符,以回車換行符 結束.如果RD模塊成功執行則給STM32回復指令“$BDFKI,DWA,Y,Y,0,0060*0A ”,如果失敗則回復“$BDFKI,DWA,N,N,0,0060*0A ”,隨后衛星就會將定位數據傳送給RD模塊.
定位數據經串口傳輸至主控制器,主控制器將水質監測模塊檢測到的數據和定位數據按照BDS短報文2.1協議處理,協議規定電文首字母固定為“A4”,英文用ASCII碼表示,漢字用unicode碼表示,發送語句“$CCTXA,上位機ID,1,2,A4電文內容7*7F”給RD模塊,然后RD模塊會回復主控單元指令是否成功執行,若成功回復“$BDFKI,TXA,Y,Y,0,0060*15 ”,失敗回復“$BDFKI,TXA,N,N,0,0060*15 ”.幾秒后,衛星就會轉發信息至上位機的RD模塊.
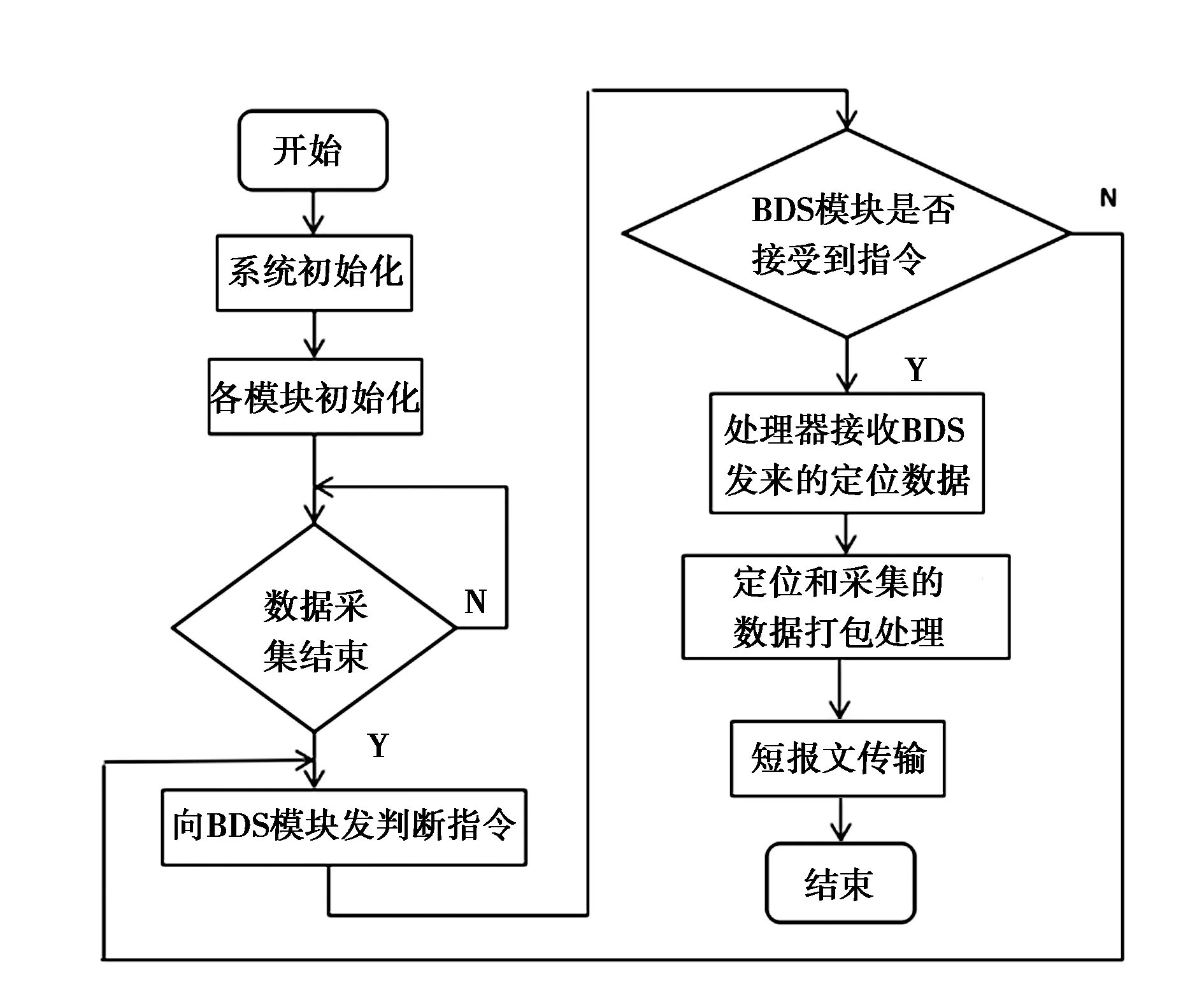
圖7 BDS通信模塊軟件流程圖
3.3 上位機設計
根據系統需求,采用Lab VIEW軟件對系統上位機進行設計,Lab VIEW是主要用于儀器控制的編程軟件[9],采用Lab VIEW編程設計的上位機界面可以顯示BDS衛星傳輸過來的仿生魚位置、水質檢測的數據遠程監控部分界面如圖8所示.先初始化,然后設置深度值,使得仿生魚可以到達指定深度作業,設置仿生魚到達指定的深度后靜止的時間,該時間段仿生魚進行水質檢測.設置好之后配置串口通信接收BDS模塊發來數據,包括:時間、位置、深度、水樣溫度值和pH值.
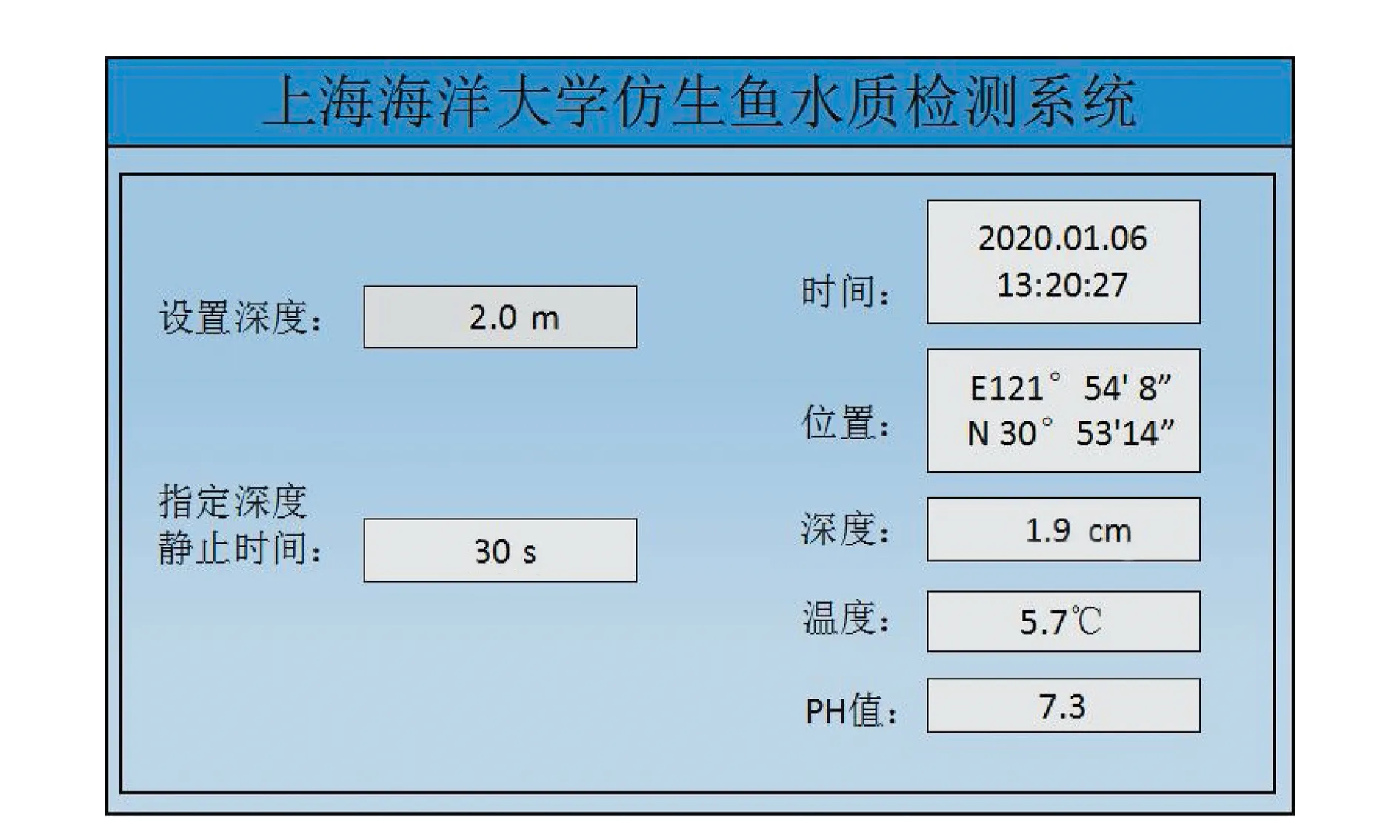
圖8 遠程監控部分界面
4 系統測試結果
為驗證該系統是否可以運行,選取上海海洋大學里湖泊某兩點位置2 m和5 m的深度進行試驗.打開Lab VIEW,系統上電,在監控界面上可觀測到位置時間和水質等信息如表1所示.由表中數據看信息與實際相符合,誤差在可接受范圍,系統運行穩定.觀察仿生魚在指定地點下潛過程,由于水流速和自身抖動的影響,會出現與原始位置略微偏移現象,但是偏差程度不至于影響檢測結果.仿生魚上浮向上位機上傳數據時間與上位機接收到數據時間略有差距,是因為BDS通信有略微延遲.

表1 系統測試實驗數據
5 結束語
本文基于STM32和BDS模塊設計用來水質檢測的仿生魚控制系統,借助BDS系統實時定位和短報文通信功能實現仿生魚與遠程監控端的通信,工作人員可以借助PC機或者智能手機等查看水質信息.該系統具有方便攜帶、投入成本較低、水下采集的數據可以實時上傳到上位機等優點,下一階段計劃在仿生魚控制系統上增設其他功能模塊,使其代替人在水中完成更多工作,具有良好的擴展性和實用性.
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代水產(2019年1期)2019-05-16 02:42:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12