一種智能化辦公桌椅的結構設計及其運動仿真
2020-11-10 04:40:00畢大品黃金桂盧艷管佳程李朱鋒
科技風 2020年29期
關鍵詞:結構設計
畢大品 黃金桂 盧艷 管佳程 李朱鋒


摘 要:現如今,智能化家具的發展已成為了一種新趨勢。本文以人機工程學、美學的理念為設計元素,設計出一種集“辦公—休閑—健康”三位一體的智能化辦公桌椅,通過對其運動分析達到兩種模式五種狀態,最后采用PLC控制實現智能化辦公桌椅的配合使用。
關鍵詞:辦公桌椅;結構設計;運動仿真
1 緒論
隨著智能化技術的不斷進步,而智能化辦公家具的發展成為了一種趨勢。普通的辦公桌椅功能過于單一,并且久坐危害健康,本文以人機工程學、美學的理念為設計元素,設計出一種適合那些追求時尚的白領人群、學生、小戶型住戶的“旋式”升降的集“辦公—休閑—健康”三位一體的智能化辦公桌椅,并利用PLC準確地控制執行部件完成所需要的動作,實現辦公模式和休閑模式的相互轉化。
2 功能分析
本次設計的智能化辦公桌椅分工作和休閑兩種模式,可以實現坐、站、躺三種姿勢的相互轉換,這樣不但可以極大地提高人們的工作效率,而且也方便人們的日常生活。
其辦公模式有三種狀態:(1)辦公桌單獨使用,將桌面升高,使人站著工作保持舒服狀態;(2)桌椅的配合,氣缸未升高時,桌面呈水平靜止狀態,此時人可以坐著進行辦公;(3)桌椅的配合,氣缸升高時,前桌腿的部分桌面足夠人正常辦公。
其休閑模式有兩種狀態:(1)單獨使用智能化辦公椅,人躺在椅子上便可以達到理想的舒適狀態;(2)桌椅的配合使用,調整桌面的高度和傾斜角度,滿足各類人的舒適需求。
3 新型智能化辦公座椅的設計
3.1 智能辦公桌的設計
智能化辦公桌主要由前桌腿、后桌面、后腿柱和連接部件四部分組成,前桌腿與后桌面由連接軸連接,而后桌面與后腿柱是通過連接部分導軌和聯結件配合連接。如圖1所示。
由《中國成年人人體尺寸》標準(GB/T 10000—1988),桌子的設計尺寸如圖2所示。
3.2 智能化辦公椅的設計
由上面的坐姿研究以及人機工程學和美學理念的設計元素,智能化辦公椅的組成結構主要包括坐墊、靠背、扶手、腿靠和傳動部分,如圖3所示。
由《中國成年人人體尺寸》標準(GB/T 10000—1988),椅子的設計尺寸如圖4所示。
4 智能化辦公桌椅的配合模式分析
該智能化辦公桌椅分兩種模式,其中辦公模式根據坐、站三種不同情況可分為三種辦公狀態,休閑兩種模式根據坐、躺兩種不同情況可分為兩種休閑狀態,共計五種狀態從而可以實現坐、站、躺三種狀態,辦公和休閑兩種模式的相互轉換,不但可以極大的提高人們的工作效率,而且也方便人們的日常生活。
4.1 辦公狀態一
根據人體工程學保證坐墊與靠背之間的夾角在95°到105°范圍內,可使座椅處于辦公狀態氣缸未升高時,適當調整桌椅距離,保證人在辦公時眼睛到物體的距離在500mm以內,以便人在工作時達到最舒服的坐姿狀態。桌面呈水平靜止狀態,如圖5的左圖。此時,人可以坐到椅子上進行正常的辦公,桌面上還內嵌有一個大支撐板可以拉開,以便支撐書籍、資料、筆記本電腦等,它的旋轉角度范圍在0°到120°之間,能夠根據人體的需要進行有效調整,如圖5的右圖所示。
4.2 辦公狀態二
當前桌腿的部分桌面足夠人正常地處理一些文件時,可適當升高氣缸,升高的后桌面除了可以起到支撐的作用外,還可以用于粘貼工作時的資料或者用來提醒自己需要做的事項的便利貼等,還可以進行專業的圖紙繪制等工作,如圖6的左圖所示。
此外,可以利用內嵌在后桌面的大支撐板的背面進行支撐,將它水平放置,可以支撐筆記本電腦。如圖6的右圖所示。
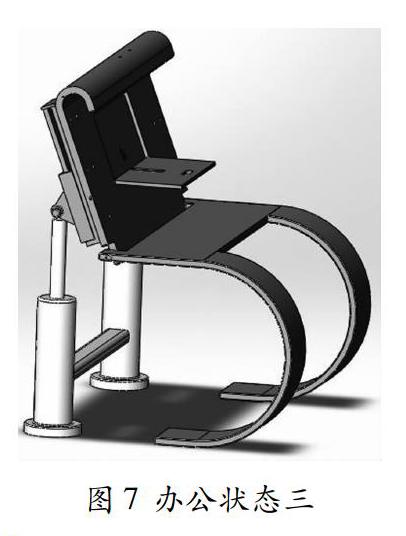
4.3 辦公狀態三
長期坐著工作會對身體健康帶來很大的傷害,所以本文設計站立辦公狀態。將桌面升高,大支撐板與地面的高度在1020mm左右,符合人機工程學,使人站著工作保持舒服狀態,如圖7所示。
4.4 休閑狀態一
第一種休閑狀態單獨使用智能化辦公椅,調整靠背與椅面的角度在110°到120°之間,此時按照人機工程學原理,人躺在椅子上便可以達到理想的舒適狀態,實現較好的休閑功能,如圖8所示。
4.5 休閑狀態二
除休息狀態外,還可以進行娛樂活動。在休閑狀態一的基礎上,與智能化辦公桌配合,調整桌面的高度和傾斜角度,以此來滿足各類人的舒適需求。
當桌面未升高時,利用大支撐板支撐筆記本電腦、平板電腦或手機等,如圖9的左圖所示。當桌面升高后,可以用后桌面和大支撐板來支撐筆記本電腦、平板電腦或手機等,如圖9的中圖和右圖所示。此時,人可以躺在椅子上,觀看桌面上筆記本電腦放的電視劇、電影、綜藝等節目,達到休閑娛樂的效果。
5 智能化辦公桌椅的運動分析
5.1 運動仿真分析
根據上一節智能化辦公桌椅的兩種模式的介紹,利用SolidWorks制圖軟件的運動仿真來分別實現智能化辦公桌椅兩種模式的轉換。
5.2 桌子的運動仿真
桌子的運動過程是由氣缸進氣口進氣,從而推動活塞桿向上運動,帶動聯結件在與桌面相連的導軌上來回移動,進而推動桌面上升移動。
對桌子進行了運動仿真,由圖10可知,在活塞桿上加了一個相對于氣缸向上運動的線性馬達,使它以50mm/s的勻速度向上運動,從而實現后桌面的抬起。例如,后桌面水平狀態時的高度為760mm,活塞桿以50mm/s的勻速推動后桌面上升,運行5秒后,此時后桌面打開大支撐板呈水平狀態后距離地面的高度為1010mm,達到人站立工作的要求。圖11為桌子的速度時間圖。
5.3 椅子的運動仿真
椅子的運動過程是以靠背和坐墊的連接軸為軸心進行轉動,椅背帶動與之連接的曲桿,進而使曲桿帶動滾輪在腿靠背的軌道上往返移動,從而撐起腿靠,達到座椅變躺椅的目的。
圖12和圖13是座椅到躺椅轉動的起始圖和最終圖,對座椅進行運動仿真,由圖14可得,在靠背和坐墊的連接軸上加了一個相對于坐墊向后運動的旋轉馬達,設定轉速為1RPM實現等速轉動,當轉動5s后,椅子靠背的背傾角從104°的工作狀態向后轉動20°,背傾角變為124°,達到休閑狀態,從而實現座椅的運動仿真。圖15為旋轉馬達的轉速時間圖。
5.4 智能化辦公桌的PLC控制
智能化辦公桌的運動是通過氣缸的升降實現的,氣缸閥門與PLC控制器連接,按鈕開關給PLC控制器發送指令來控制氣動閥門,從而推動活塞桿向上運動,帶動聯結件在導軌上移動,抬升桌面,最終達到理想高度。
智能化辦公椅的運動是連接軸的轉動,按鈕開關給PLC控制器發送指令來控制連接軸,帶動曲桿轉動,從而推動滾輪使小腿坐墊部分升起,最終實現座椅變躺椅的動作,達到舒適狀態。
6 結語
本文通過對互聯網時代下辦公形態的研究,了解人們對智能化辦公桌的需求,以人機工程學、美學的理念為設計元素,在制圖軟件SolidWorks2015上設計出桌子和椅子的模型。在反復修改調整之后,最終設計出智能化辦公氣缸桌和智能化辦公躺椅。桌椅進行配合使用能夠實現辦公模式和休閑模式兩種狀態,達到“辦公—休閑—健康”三位一體的效果。
參考文獻:
[1]馬猛猛.PLC在步進電機控制中的應用探究[J].科技創新與應用,2019(01):161-162.
[2]陳勁松.西門子PLC在變頻調速電機的應用[J].技術與市場,2019,26(02):161.
[3]史國生.電氣控制與可編程控制器技術[M].北京:化學工業出版社,2003.
[4]張浩.PLC控制系統抗干擾能力的優化措施[J].信息記錄材料,2019,20(01):98-99.
[5]毛昀,楊峰.基于PLC的步進電機控制系統設計[J].工業儀表與自動化裝置,2014(04):87-89+98.
[6]肖禮志,黃美發,劉夫云.基于SolidWorks的尺寸公差參數化設計方法[D].計算機系統應用,2011,(09):210-213.
[7]索超,李玉翔,林樹忠.基于VB語言對SolidWorks參數化設計的二次開發[J].制造業自動化,2013,(15):137-140.
[8]吳文根.基于SolidWorks的產品設計專用系統的研究與開發[D].武漢理工大學,2007.
[9]胡壽松.自動控制原理[M].北京:國防工業出版社,1987.
基金項目:江蘇省高等學校大學生創新創業訓練計劃項目:基于PLC的新型智能辦公桌椅的設計(201712056011Y)
作者簡介:畢大品(1995—),男,漢族,江蘇鎮江人,本科,研究方向:機械結構設計。
通訊作者:李朱鋒(1989—),男,漢族,江蘇南通人,碩士,講師,主要研究方向:工程力學與機械結構設計。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23