復雜展開路徑太陽翼地面零重力試驗技術的研究
2020-11-10 08:45:50胡亞航王國星臧梓軼
航天制造技術 2020年5期
胡亞航 程 澤 王國星 臧梓軼 段 萍 王 帥
復雜展開路徑太陽翼地面零重力試驗技術的研究
胡亞航 程 澤 王國星 臧梓軼 段 萍 王 帥
(北京衛星制造廠有限公司,北京 100190)
太陽翼裝配、試驗需在零重力環境下進行。某遙感衛星太陽翼展開過程太陽板質心運動軌跡近似大半圓弧線,屬于復雜的展開路徑,其重力卸載難度較大。針對此問題,設計了一套氣浮式零重力補償設備,采用一套分跨式氣浮裝置和氣浮平臺解決了復雜展開路徑太陽翼零重力卸載的難題,分跨式的設計也解決了太陽翼收攏后氣浮裝置干涉的問題;設計了一套可上下調節,鎖緊氣管的氣管固定裝置解決了展開試驗時氣管與太陽翼聯動機構鉤掛的問題。結果表明采用此種裝配手段,可有效地開展此種復雜展開路徑太陽翼在地面的裝配、展開試驗、基頻測試工作,保證了太陽翼的裝配技術指標。
復雜展開路徑太陽翼;零重力;氣浮展開;分跨式氣浮裝置;氣管固定裝置

1 引言
太陽翼作為衛星的一次能源部分,是衛星系統的重要部件,其零件制造質量及裝配質量直接關系衛星的可靠性、壽命和功能,甚至關系到衛星在軌運行的成敗。太陽翼裝配是整個太陽翼研制任務的重要階段,太陽翼裝配主要針對太陽翼結構進行系統的裝調工作,裝調工作須在零重力展開設備上進行,涉及了工藝裝備的裝調、展開機構的裝配、翼面調整、聯動機構的安裝、太陽翼地面展開試驗等環節,其中太陽翼地面展開試驗是對太陽翼裝配質量驗證性試驗[1]。
太陽翼在太空中處于零重力環境,在地面部裝、試驗時,需要補償重力。常見的零重力補償方法主要是力平衡法,如吊掛式、氣球式和氣浮式。吊掛式展開適合運動軌跡簡單、一次展開的太陽翼,主要優點是占用空間相對較小,操作簡便,缺點是適用能力差,零重力抵消裝置調試時間長,環節多;氣球式展開適用于展開速度慢,運動軌跡較短,卸載重力不大的太陽翼,優點是使用方便,缺點是氣球穩定性較差[2];氣浮式展開原理是將由氣源產生的高壓氣體經配氣箱調壓后通過空壓軟管輸送給氣足,經氣足的節流孔噴出,高速排出的氣體在進入大氣時產生壓差,壓差在氣足底面與氣浮平臺平間形成氣膜。因為氣壓作用,將太陽翼懸浮在氣浮平臺上,抵消掉重力對自身及載荷的作用。這種方法的優點是:生成的氣壓穩定,能適應載荷的大范圍變化,適合展開軌跡復雜的太陽翼[3]。
2 某遙感衛星太陽翼及其展開過程
某遙感衛星太陽翼單翼包括機械部分和電池電路部分,其中機械部分由連接板、基板、鉸鏈機構、聯動機構和壓緊釋放機構組成。發射階段,太陽翼收攏壓緊在衛星的+、-側壁。當入軌后根據程控指令,太陽翼壓緊桿依次解鎖,從衛星的+、-方向展開至+、-方向,轉動完成太陽翼展開過程。
由于該結構太陽翼展開過程為二維平面運動,橫向掃過的面積較大,太陽板質心運動軌跡近似大半圓弧線。太陽翼的展開過程見圖1,第一步,所有的壓緊釋放機構點火工作,太陽翼釋放,4塊太陽板在根部鉸鏈的作用下展開,直至根部鉸鏈轉動90°,此過程中四塊太陽板在聯動機構的作用下保持收攏狀態,作為一個整體轉動90°;第二步,根部鉸鏈轉動90°時,四塊板在聯動機構的作用下同步展開,到位后鎖定。
圖1 太陽翼展開過程示意圖
由于該太陽翼特殊的展開軌跡,氣球式、吊掛式零重力展開裝置不適用該太陽翼。而氣浮式展開適用于展開軌跡復雜、展開機構橫向運動范圍大的情況,適用于該型太陽翼的地面裝配以及地面展開試驗[4,5]。
3 零重力補償設備的設計
3.1 總體方案設計
圖2 太陽翼與氣浮裝置示意圖
本方案設計的氣浮系統由氣浮平臺、氣浮裝置、配氣臺及氣管固定裝置等組成。如圖2所示,太陽翼由氣浮裝置支撐在氣浮臺上。其中,外板安裝氣浮裝置兩個,中板、內板和連接板各安裝一個氣浮裝置。
3.2 氣浮平臺設計
氣浮平臺由4塊拼接而成,其中一塊平臺與另外3塊錯位擺放,為支架車和模擬墻提供操作空間,氣浮平臺布局如圖3所示。

圖3 太陽翼氣浮平臺
氣浮平臺為鑄鐵平臺表面粘貼薄花崗巖石板(厚度10~20mm);平臺工作面需無嚴重影響外觀和使用性能的裂紋、劃痕、碰傷、材質疏松等缺陷;每塊平臺有6個支撐點,其中至少有3個主支撐點;平臺安裝后,工作面距地面高度(1000±5)mm,鑄鐵平臺下表面距離地面空間距離(650±10)mm;平臺支撐支架需具有微調機構,能夠調節平臺水平度并具有鎖緊功能,通過調節保證該平臺與其它平臺連接一起后的平面度要求。平臺在車間長時間停放后,可以通過微調機構的調節,修正平臺變形,保證整個平臺氣浮要求的平面度;根據氣浮平臺的使用要求,產品表面應無影響氣足移動的缺陷。負載50kg的氣足可以在平臺上順暢移動,運動無停頓。
3.3 氣浮裝置設計

圖4 氣浮裝置主要組成部分
氣浮裝置包括氣足及與太陽翼的連接工裝,主要用于在氣浮平臺上支撐太陽翼,在太陽翼展開過程中氣足懸浮于氣浮平臺上,模擬太陽翼的零重力狀態。氣浮裝置主要由氣足、氣足轉接件、基板轉接件、彈簧、連桿、滑桿、軸承及軸承壓蓋等部分組成,如圖4所示。
氣浮裝置通過彈簧進行柔性支撐,并通過滑桿與直線軸承的配合實現上下運動,這樣可以使氣足的支撐力不因氣浮臺面的凹凸不平而產生較大變化。設置導向連桿組件,保證氣浮裝置在太陽翼展開過程中始終保持兩氣足組件為左右開立狀態。氣浮裝置在基板上的安裝位置應左右可調,調整量為(-10~10)mm。彈簧使用前標定試驗,測得實際的彈簧常數。
氣足組件由螺桿和足墊組成,如圖5所示。氣足成對使用,共用同一充氣管路充氣,即采用三通給兩個氣足供氣。氣足與工裝之間用粗牙螺紋連接,螺桿的螺紋長度≥40mm,螺桿與足墊之間以球鉸連接,氣足材料質輕、耐磨、耐蝕、防銹。
圖5 氣足組件示意圖
由于太陽翼氣浮裝置中,主承力零件主要是氣足轉接件和基板轉接件,故將分別靜力學分析兩個零件。

a. 氣足轉接件。設置氣足轉接件上與氣足的安裝孔為固定點,額定載荷(30kg)的重量加載在氣足轉接件頂部彈簧接觸端面處,考慮重力的影響。圖6為氣足轉接件的有限元分析結果,圖中可以看出,整個氣足轉接件最大應力為31.6MPa,發生在與氣足連接處,豎直方向最大變形量為0.002mm;發生在與氣足連接塊附近,水平方向最大變形量為0.022mm。
b. 基板轉接件。將基板轉接件上與彈簧接觸面設置為固定點,將額定載荷(30kg)的重量均布加載在與基板安裝面上,同時考慮重力的影響。圖7為基板轉接件的有限元分析結果,圖中可以看出,整個基板轉接件最大應力為22.6MPa,發生在開口最低部,最大變形量為0.1mm,發生在與基板安裝面最外端處。

圖7 基板轉接件結構分析
通過有限元分析結果顯示,氣浮裝置的強度和剛度滿足要求,安全系數在3以上。
3.4 配氣臺設計
配氣臺由箱體、氣壓表、氣源組件以及相應的內部通氣管路組成。
氣源組件的功能是將廠房提供的原始氣源轉換成可以提供給太陽翼使用的氣源。氣源組件由過濾器、截止閥、調壓閥及其相關氣路元件所組成,氣源組件氣路示意圖如圖8所示[6,7]。

圖8 氣源組件示意圖
氣源組件中各部分功能:過濾器——過濾廠房氣源中的雜質,保護調壓閥和氣足,避免氣足受到損傷;截止閥——用于控制氣足的通氣狀態;調壓閥——將廠房氣源的高壓氣體壓到氣足需要的低壓氣體;快速接頭——用于氣源側氣路和氣足側氣路快速連接,并且密封可靠,避免氣源泄露;氣源組件的原始氣源輸入壓力0.7~1MPa,供給氣足輸出壓力0.3~0.7MPa。
氣源處理主要由配氣臺內部的三級過濾裝置完成,對氣源輸入的氣體進行濾水、油和雜質,過濾器濾芯過濾微粒最小尺寸為5μm。氣源氣體經過濾后,通過調壓閥降壓處理,分多路供給氣足。
配氣臺使用前需要接通氣源和氣足。與氣源的接口為標準10mm快速插頭,從氣源引出直徑為10mm的標準氣管直接插入即可。打開氣源接口上方的開關,壓力表就會顯示氣源的供氣壓力。
在配氣臺的多路輸出接口對應氣足的供氣管路,接口也采用標準10mm快速插頭,在氣源開關打開的情況下如果打開輸出開關,對應的管路即可供氣,同時氣壓表會顯示氣足的供氣壓力。
3.5 氣管固定裝置設計
充氣管路的合理化布局是影響氣浮裝置使用、降低管路附加阻力的關鍵因素,布局方式如圖9所示。
圖9 氣管走線示意圖
沿基板下沿布置管路。所有的主管路均沿基板下沿布置,配氣臺設置在支架車附近,除由配氣臺到太陽翼的管路外,其它管路不需要操作人員抬起隨動,減少了操作人員的對太陽翼的影響。
氣浮固定裝置一端安裝在板間鉸鏈上,一端安裝吊環螺母,所有氣足充氣軟管和三通均通過扎帶綁扎在氣浮裝置的支架上,之后穿過氣浮固定裝置下端的吊環螺母孔,直至連接至配氣柜。氣浮固定裝置具備上下調節功能,防止收攏時氣浮固定裝置互相干涉;下端的吊環螺母攻有螺紋孔,用于固定、解鎖氣管,保證氣管在展開時不會發生攢動,最大程度減小折彎氣管帶來的阻力距。太陽翼收攏后檢查相臨的氣浮裝置和管路干涉勾掛,保證氣足的充氣軟管和三通不會與氣浮臺面接觸,從而避免氣足的充氣軟管與氣浮臺面卡滯。
4 應用效果驗證
4.1 地面展開試驗
太陽翼部裝完成后將所有板間鉸鏈解鎖,使鉸鏈鎖定鉤從鎖定位置脫開,之后解鎖根部鉸鏈,多人配合將連接板、內板、中板、外板全部合攏在模擬墻上,完全收攏時目測連接板和太陽板上的壓緊襯套的位置對齊,之后確認氣浮裝置狀態正常(通氣、有無干涉、氣路等)。手松開太陽翼的同時記錄太陽翼展開時間,進行太陽翼展開試驗。太陽翼在聯動機構的引導下平穩展開,并在展開終了位置可靠鎖定。太陽翼展開時間43s,符合地面展開時間的設計要求值;太陽翼CCL性能、鉸鏈性能、微動開關性能均滿足設計要求。
4.2 地面展開試驗基頻測試
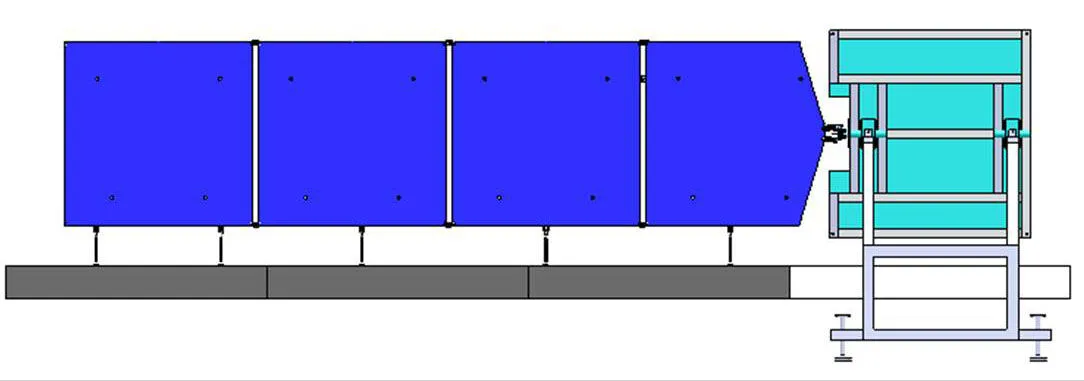
圖10 太陽翼基頻測試示意圖
裝配完成后在氣浮平臺上測試太陽翼展開狀態下基頻。測試時,太陽翼處于展開、鎖定狀態,根鉸固定在模擬墻上,太陽板、連接板通過氣浮裝置支撐在氣浮臺上,如圖10所示。
首先,利用多普勒效應測試太陽翼上測點的運動速度;其次,變換分析采集到的測點運動速度信號,求出自功率譜,即可找出第一階固有頻率。在分析模型中去掉氣浮裝置后,太陽翼展開狀態的第一階固有頻率0.2Hz,滿足設計的指標要求。
5 結束語
分析了各類零重力補償方式的優劣和適用情況,針對復雜展開路徑太陽翼的產品特點,最終采用氣浮式零重力補償方案。為克服收攏后氣浮裝置干涉的問題,設計了一套分跨式結構的支撐工裝;為解決展開試驗時氣管與聯動機構的鉤掛問題,設計了一套可上下調節,鎖緊氣管的氣管固定裝置。該方案通過了太陽翼地面展開試驗和基頻試驗的驗證,可推廣至其他太陽翼及機構類產品的零重力裝配和展開試驗。
1 從強.空間機構地面重力補償設備跟蹤研究[J]. 航天器環境工程,2012(1):92~99
2 陳艷平,程澤,李海月,等. 步式展開太陽翼地面零重力試驗技術的研究[J]. 航天制造技術,2019(2):63~64
3 任守志,劉立平. 零重力試驗裝置對太陽翼展開影響分析[J]. 航天器環境工程,2008(6):73~78
4 楊巧龍,閆澤紅,任守志,等. 套筒驅動的大型可展收柔性太陽翼地面展開重力卸載研究[J]. 載人航天,2017(4):536~540
5 周啟航. 空間機械臂地面零重力模擬系統設計及分析[D]. 哈爾濱:哈爾濱工業大學出版社,2012
6 齊乃明,張文輝,高九州,等. 空間微重力環境地面模擬試驗方法綜述[J]. 航天控制,2011(3):95~100
7 陳烈民. 衛星太陽翼展開運動分析[J]. 中國空間科學技術,1992(2):8~9
Research on Zero Gravity Test Technology of Solar Array with Complex Deployment Path
Hu Yahang Cheng Ze Wang Guoxing Zang Ziyi Duan Ping Wang Shuai
(Beijing Spacecraft Co., Ltd., Beijing 100190)
The assembly and test of the solar array must be carried out in a zero gravity environment. During the deployment of a solar array, the solar array?s center of mass motion trajectory is similar to a semicircular arc, which is a complex deployment path, and its gravity unloading is difficult. In this paper, a set of air-floating zero-gravity compensation equipment is designed, and a set of split-span air-floating device and air-floating platform are adopted to solve the problem of zero-gravity unloading of the solar array. The split-span design also solves the problem of interference after the solar array is folded. A set of tracheal fixing devices that can be adjusted up and down to lock the trachea are designed to solve the problem of the trachea and the solar array linkage mechanism hooking during the deployment test. The results show that the using of this assembly method not only can effectively carry out the assembly and deployment test, and fundamental frequency test, but also the assembly technical indicators of the solar array can be well guaranteed.
solar array with complex deployment path;zero gravity;air-floating deployment;split-span air-floating device;tracheal fixing device
胡亞航(1990),工程師,機械設計制造及其自動化專業;研究方向:空間機構裝配和復材結構部裝的工藝設計。
2020-09-22
