單軌懸掛式膠帶輸送機巡檢機器人研究設計
2020-11-06 06:05:55黎思奇劉枝峰
科學與財富 2020年22期
黎思奇 劉枝峰
摘要:一直以來,煤礦生產(chǎn)的安全指數(shù)備受社會與人民的關注,而煤礦生產(chǎn)的安全指數(shù)取決于煤礦生產(chǎn)所處的環(huán)境及煤礦生產(chǎn)所使用的設備。由于目前市面上的檢測煤礦技術不夠全面,以至于無法保證煤礦生產(chǎn)的安全指數(shù)在安全的區(qū)間內(nèi)波動。正是有了可靠性較高的機器人技術的研發(fā),煤礦生產(chǎn)的安全指數(shù)多了一種檢測方式,保障了帶式輸送機更高效、更穩(wěn)定、更安全的運行。在此基礎上,本文研究設計了一種用于井工煤礦的單軌懸掛式巡檢機器人,使用特有的檢測系統(tǒng)進行檢測,確保煤礦生產(chǎn)環(huán)境的安全與生產(chǎn)設備的高效運行。
關鍵詞:帶式輸送機;巡檢;機器人
前言:
帶式輸送機作為煤礦生產(chǎn)必不可少的運輸機械,最常見的就是在井下作業(yè)工作中和洗煤廠的工作中。就我國目前的帶式輸送機巡檢方式來說,一般以人工巡檢為主,而人工巡檢不僅工作難度大,工作效率也不高,檢測的數(shù)據(jù)浮動范圍過大。在我國煤礦事業(yè)使用的檢測系統(tǒng)中,大都無法克服輸送機傳送距離長、監(jiān)控范圍廣等特點。為了促進我國智能檢測技術的提高,有必要對煤礦檢測中的單軌懸掛式膠帶輸送機巡檢機器人進行研究設計。一方面強化煤礦生產(chǎn)巡檢工作的工作效率,另一方面可以有效預防帶式輸送機運作過程中發(fā)生事故。
1.??? 機器人系統(tǒng)設計
1.1? 硬件組成
在煤礦生產(chǎn)中,單軌懸掛式膠帶輸送機巡檢機器人的硬件組成有傳動部分、信號采集部分和數(shù)據(jù)傳輸、監(jiān)控部分。通過這三大部分的協(xié)調(diào)運作,充分發(fā)揮無線充電技術、無線感應技術、無線數(shù)傳技術,及時準確的判斷、檢測煤礦巷道內(nèi)不同類型的故障。打破人工檢測的局限性,高效分析、處理檢測數(shù)據(jù),達到實時、準確預判緊急事故發(fā)生的效果。
1.1.1????? 傳動部分
單軌懸掛式膠帶輸送機巡檢機器人硬件組成中的傳動部分主要是把動力裝置產(chǎn)生的動能轉(zhuǎn)化成工作機械中的動能。其轉(zhuǎn)化裝置主要包括了初始驅(qū)動裝置、制止裝置、懸吊單軌[1]。由初始驅(qū)動裝置的啟動使機器人本體在懸吊單軌上來回作業(yè),以至于實時檢測、監(jiān)控帶式輸送機的有效信息。
1.1.2????? 信號采集部分
單軌懸掛式膠帶輸送機巡檢機器人硬件組成中的信號采集部分主要通過內(nèi)部傳感器,來主動收集各種類型信號的。最終把收集到的各類信息向信號中心如實傳送。信號采集部分由特種機器人本體、專用高靈敏度紅外線溫度傳感器、礦用膠帶機煙霧傳感器、高抗噪聲音采集器和專用高清防爆攝像機組成。在對信號的采集過程中,各個零部件缺一不可。
1.1.3????? 數(shù)據(jù)傳輸、監(jiān)控部分
在單軌懸掛式膠帶輸送機巡檢機器人硬件組成中,數(shù)據(jù)傳輸、監(jiān)控部分主要通過DDN、2M、以太網(wǎng)等傳輸途徑,把采集的信號傳達給檢測監(jiān)控中心,從而達到監(jiān)控效果。在這過程中,需要無線基站井下交換機、井下監(jiān)控終端、地面控制中心監(jiān)控終端、地面控制中心交換機等協(xié)調(diào)配合。數(shù)據(jù)傳輸、監(jiān)控部分是巡檢機器人硬件組成的核心,只有保持傳輸、監(jiān)控部分的完整性,檢測工作才能順利進行。
1.2? 機器人裝置設計
在對單軌懸掛式巡檢機器人裝置的設計中,主要設計了特種機器人本體、特種機器人本體專用傳感器、錄像裝置等主導裝置。而特種機器人本體又包括對接線腔、主控腔和電池腔的設計,使主控箱與電池腔串聯(lián),在電池腔內(nèi)設計專門的電池,為主控箱持續(xù)供電。特種機器人本體專用傳感器就是要打破應用環(huán)境、數(shù)據(jù)處理、通信協(xié)議的差異性,實現(xiàn)信息共享。錄像裝置主要零部件有液晶顯示屏、控制裝置、成像設備等,一一對應著提取圖像信息、增加圖像聚焦、捕捉影像工作的進行。
1.3? 數(shù)據(jù)采集系統(tǒng)設計
單軌懸掛式巡檢機器人的數(shù)據(jù)采集系統(tǒng)設計主要有高級錄像設備,比如可自動化清潔的防爆攝像機;靈敏度強的傳感設備,比如專用煙霧傳感器、專用溫度傳感器、專用濕度傳感器。這些設計主要使單軌懸掛式巡檢機器人在進行作業(yè)時,擴大檢測錄像范圍,全面采集煙霧、溫度、濕度、音質(zhì)、動態(tài)圖像等數(shù)據(jù),同時還要檢測到帶式輸送機的運行速度[2]。其次,利用模擬信號處理技術、數(shù)據(jù)分析處理技術設計一個高效處理信息的資料庫,對采集的數(shù)據(jù)進行綜合的篩選后壓縮處理,為地面控制中心輸送高質(zhì)量的數(shù)據(jù)。
2.??? 機器人軟件系統(tǒng)設計
2.1? 程序設計
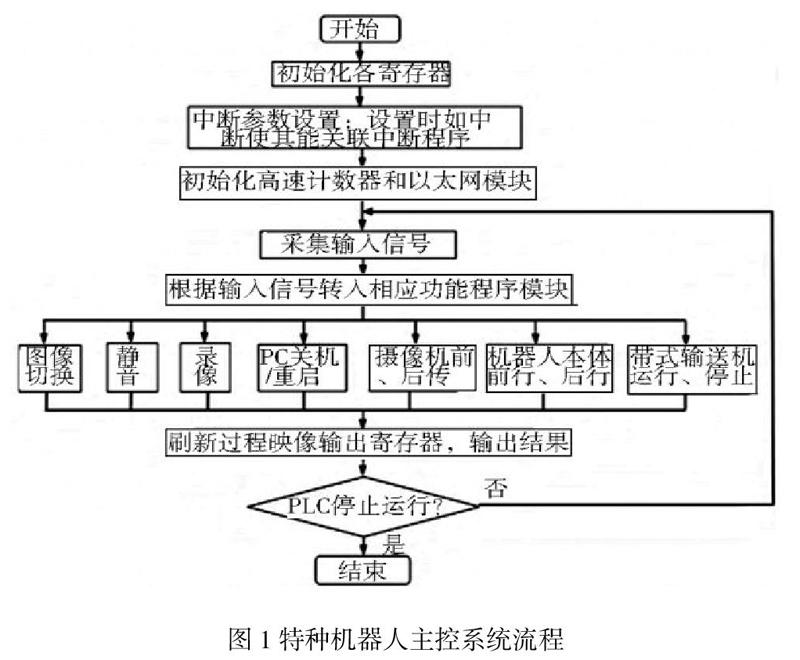
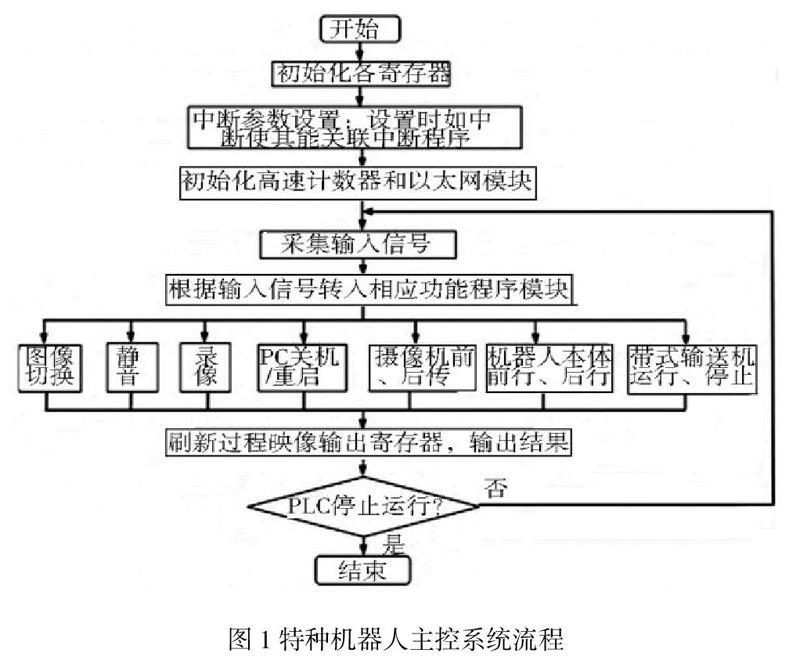
單軌懸掛式膠帶輸送機巡檢機器人系統(tǒng)軟件在西門子S7-200PLC的基礎上得以開發(fā),按照效果顯著性來區(qū)分,其系統(tǒng)軟件可分為控制本體驅(qū)動運行部分、控制音頻、錄像部分、控制帶式輸送機速率部分和控制程序截止部分[3]。在這四大部分的組成、調(diào)配下,呈現(xiàn)出完整的特種機器人主控系統(tǒng)流程,如圖1。
2.2? 機器人系統(tǒng)功能
2.2.1????? 環(huán)境數(shù)據(jù)采集功能
帶式輸送機在操作、作業(yè)的時候,由懸吊單行軌道與機器人裝置的摩擦力驅(qū)動,使得機器人裝置來回運動,機器人本體上的機械設備開啟檢測模式,配備的錄像裝置開始錄像,發(fā)揮環(huán)境數(shù)據(jù)采集功能。在發(fā)揮環(huán)境數(shù)據(jù)采集功能后,還對采集的數(shù)據(jù)信息進行自動化儲存,傳輸?shù)矫旱V管理人員的儲存硬盤,便于煤礦管理部門根據(jù)采集的實時數(shù)據(jù)對礦山管理采取相應措施。
2.2.2????? 故障報警功能
在所設計的機器人系統(tǒng)中,具有故障報警功能的。在地面控制系統(tǒng)的操控下,機器人傳輸?shù)膶崟r檢測信息可以被自主性判別,一旦信息安全指數(shù)不在安全區(qū)間內(nèi),警報系統(tǒng)便啟動警報。待安全員到現(xiàn)場進行故障排查工作后,方可解除警報,帶式輸送機恢復工作狀態(tài)。
3結(jié)語
總的來說,單軌懸掛式膠帶輸送機巡檢機器人的設計,是井工煤礦事業(yè)發(fā)展的關鍵所在。通過機器巡檢,不僅保障了礦產(chǎn)安全開采工作,也能提高煤礦生產(chǎn)效率。本文介紹的機器人系統(tǒng),可以如實的反饋帶式輸送機作業(yè)情況,及時提醒作業(yè)安全問題,提高帶式輸送機的安全可靠性。為了我國礦產(chǎn)資源的合理開發(fā),應該加大單軌懸掛式膠帶輸送機巡檢機器人研究設計,排除資源使用過程中的安全隱患問題。
參考文獻:
[1]?? 歐陽愛國.邵福.舒盛榮等.一種單軌懸掛式采茶機結(jié)構設計及通風管流場仿真分析[J].江蘇農(nóng)業(yè)科學,2019,47(20):236-240.
[2]?? 魏彬彬.綜掘機履帶牽引電纜裝置的研制與應用[J].煤,2019,028(002):38-39.
[3]?? 胡步毛.潘妍.魯昭.我國首條懸掛式單軌試驗線建設實踐[J].都市快軌交通,2019,32(01):48-52.
黎思奇 劉枝峰
摘要:一直以來,煤礦生產(chǎn)的安全指數(shù)備受社會與人民的關注,而煤礦生產(chǎn)的安全指數(shù)取決于煤礦生產(chǎn)所處的環(huán)境及煤礦生產(chǎn)所使用的設備。由于目前市面上的檢測煤礦技術不夠全面,以至于無法保證煤礦生產(chǎn)的安全指數(shù)在安全的區(qū)間內(nèi)波動。正是有了可靠性較高的機器人技術的研發(fā),煤礦生產(chǎn)的安全指數(shù)多了一種檢測方式,保障了帶式輸送機更高效、更穩(wěn)定、更安全的運行。在此基礎上,本文研究設計了一種用于井工煤礦的單軌懸掛式巡檢機器人,使用特有的檢測系統(tǒng)進行檢測,確保煤礦生產(chǎn)環(huán)境的安全與生產(chǎn)設備的高效運行。
關鍵詞:帶式輸送機;巡檢;機器人
前言:
帶式輸送機作為煤礦生產(chǎn)必不可少的運輸機械,最常見的就是在井下作業(yè)工作中和洗煤廠的工作中。就我國目前的帶式輸送機巡檢方式來說,一般以人工巡檢為主,而人工巡檢不僅工作難度大,工作效率也不高,檢測的數(shù)據(jù)浮動范圍過大。在我國煤礦事業(yè)使用的檢測系統(tǒng)中,大都無法克服輸送機傳送距離長、監(jiān)控范圍廣等特點。為了促進我國智能檢測技術的提高,有必要對煤礦檢測中的單軌懸掛式膠帶輸送機巡檢機器人進行研究設計。一方面強化煤礦生產(chǎn)巡檢工作的工作效率,另一方面可以有效預防帶式輸送機運作過程中發(fā)生事故。
1.??? 機器人系統(tǒng)設計
1.1? 硬件組成
在煤礦生產(chǎn)中,單軌懸掛式膠帶輸送機巡檢機器人的硬件組成有傳動部分、信號采集部分和數(shù)據(jù)傳輸、監(jiān)控部分。通過這三大部分的協(xié)調(diào)運作,充分發(fā)揮無線充電技術、無線感應技術、無線數(shù)傳技術,及時準確的判斷、檢測煤礦巷道內(nèi)不同類型的故障。打破人工檢測的局限性,高效分析、處理檢測數(shù)據(jù),達到實時、準確預判緊急事故發(fā)生的效果。
1.1.1????? 傳動部分
單軌懸掛式膠帶輸送機巡檢機器人硬件組成中的傳動部分主要是把動力裝置產(chǎn)生的動能轉(zhuǎn)化成工作機械中的動能。其轉(zhuǎn)化裝置主要包括了初始驅(qū)動裝置、制止裝置、懸吊單軌[1]。由初始驅(qū)動裝置的啟動使機器人本體在懸吊單軌上來回作業(yè),以至于實時檢測、監(jiān)控帶式輸送機的有效信息。
1.1.2????? 信號采集部分
單軌懸掛式膠帶輸送機巡檢機器人硬件組成中的信號采集部分主要通過內(nèi)部傳感器,來主動收集各種類型信號的。最終把收集到的各類信息向信號中心如實傳送。信號采集部分由特種機器人本體、專用高靈敏度紅外線溫度傳感器、礦用膠帶機煙霧傳感器、高抗噪聲音采集器和專用高清防爆攝像機組成。在對信號的采集過程中,各個零部件缺一不可。
1.1.3????? 數(shù)據(jù)傳輸、監(jiān)控部分
在單軌懸掛式膠帶輸送機巡檢機器人硬件組成中,數(shù)據(jù)傳輸、監(jiān)控部分主要通過DDN、2M、以太網(wǎng)等傳輸途徑,把采集的信號傳達給檢測監(jiān)控中心,從而達到監(jiān)控效果。在這過程中,需要無線基站井下交換機、井下監(jiān)控終端、地面控制中心監(jiān)控終端、地面控制中心交換機等協(xié)調(diào)配合。數(shù)據(jù)傳輸、監(jiān)控部分是巡檢機器人硬件組成的核心,只有保持傳輸、監(jiān)控部分的完整性,檢測工作才能順利進行。
1.2? 機器人裝置設計
在對單軌懸掛式巡檢機器人裝置的設計中,主要設計了特種機器人本體、特種機器人本體專用傳感器、錄像裝置等主導裝置。而特種機器人本體又包括對接線腔、主控腔和電池腔的設計,使主控箱與電池腔串聯(lián),在電池腔內(nèi)設計專門的電池,為主控箱持續(xù)供電。特種機器人本體專用傳感器就是要打破應用環(huán)境、數(shù)據(jù)處理、通信協(xié)議的差異性,實現(xiàn)信息共享。錄像裝置主要零部件有液晶顯示屏、控制裝置、成像設備等,一一對應著提取圖像信息、增加圖像聚焦、捕捉影像工作的進行。
1.3? 數(shù)據(jù)采集系統(tǒng)設計
單軌懸掛式巡檢機器人的數(shù)據(jù)采集系統(tǒng)設計主要有高級錄像設備,比如可自動化清潔的防爆攝像機;靈敏度強的傳感設備,比如專用煙霧傳感器、專用溫度傳感器、專用濕度傳感器。這些設計主要使單軌懸掛式巡檢機器人在進行作業(yè)時,擴大檢測錄像范圍,全面采集煙霧、溫度、濕度、音質(zhì)、動態(tài)圖像等數(shù)據(jù),同時還要檢測到帶式輸送機的運行速度[2]。其次,利用模擬信號處理技術、數(shù)據(jù)分析處理技術設計一個高效處理信息的資料庫,對采集的數(shù)據(jù)進行綜合的篩選后壓縮處理,為地面控制中心輸送高質(zhì)量的數(shù)據(jù)。
2.??? 機器人軟件系統(tǒng)設計
2.1? 程序設計
單軌懸掛式膠帶輸送機巡檢機器人系統(tǒng)軟件在西門子S7-200PLC的基礎上得以開發(fā),按照效果顯著性來區(qū)分,其系統(tǒng)軟件可分為控制本體驅(qū)動運行部分、控制音頻、錄像部分、控制帶式輸送機速率部分和控制程序截止部分[3]。在這四大部分的組成、調(diào)配下,呈現(xiàn)出完整的特種機器人主控系統(tǒng)流程,如圖1。
2.2? 機器人系統(tǒng)功能
2.2.1????? 環(huán)境數(shù)據(jù)采集功能
帶式輸送機在操作、作業(yè)的時候,由懸吊單行軌道與機器人裝置的摩擦力驅(qū)動,使得機器人裝置來回運動,機器人本體上的機械設備開啟檢測模式,配備的錄像裝置開始錄像,發(fā)揮環(huán)境數(shù)據(jù)采集功能。在發(fā)揮環(huán)境數(shù)據(jù)采集功能后,還對采集的數(shù)據(jù)信息進行自動化儲存,傳輸?shù)矫旱V管理人員的儲存硬盤,便于煤礦管理部門根據(jù)采集的實時數(shù)據(jù)對礦山管理采取相應措施。
2.2.2????? 故障報警功能
在所設計的機器人系統(tǒng)中,具有故障報警功能的。在地面控制系統(tǒng)的操控下,機器人傳輸?shù)膶崟r檢測信息可以被自主性判別,一旦信息安全指數(shù)不在安全區(qū)間內(nèi),警報系統(tǒng)便啟動警報。待安全員到現(xiàn)場進行故障排查工作后,方可解除警報,帶式輸送機恢復工作狀態(tài)。
3結(jié)語
總的來說,單軌懸掛式膠帶輸送機巡檢機器人的設計,是井工煤礦事業(yè)發(fā)展的關鍵所在。通過機器巡檢,不僅保障了礦產(chǎn)安全開采工作,也能提高煤礦生產(chǎn)效率。本文介紹的機器人系統(tǒng),可以如實的反饋帶式輸送機作業(yè)情況,及時提醒作業(yè)安全問題,提高帶式輸送機的安全可靠性。為了我國礦產(chǎn)資源的合理開發(fā),應該加大單軌懸掛式膠帶輸送機巡檢機器人研究設計,排除資源使用過程中的安全隱患問題。
參考文獻:
[1]?? 歐陽愛國.邵福.舒盛榮等.一種單軌懸掛式采茶機結(jié)構設計及通風管流場仿真分析[J].江蘇農(nóng)業(yè)科學,2019,47(20):236-240.
[2]?? 魏彬彬.綜掘機履帶牽引電纜裝置的研制與應用[J].煤,2019,028(002):38-39.
[3]?? 胡步毛.潘妍.魯昭.我國首條懸掛式單軌試驗線建設實踐[J].都市快軌交通,2019,32(01):48-52.
