基于決策不確定性的多目標跟蹤傳感器管理
2020-11-06 06:44:18田晨裴揚侯鵬趙倩
航空學報 2020年10期
田晨,裴揚,2,*,侯鵬,趙倩
1.西北工業大學 航空學院,西安 710072 2.光電控制技術重點實驗室,洛陽 471023
隨著軍事技術的發展,信息化作戰逐漸成為現代戰爭的主要形式,這也為傳感器系統的有效使用提出了更高的要求[1]。特別是在區域防空中,要實現對空中來犯目標的有效攔截,及早發現并穩定跟蹤是關鍵。在綜合利用多傳感器對多目標進行跟蹤的過程中,為實現傳感器資源的高效利用,需要對傳感器接收到的多目標信息做實時評估,保證有限的傳感器資源優先分配給更感興趣的目標[2]。從本質上講,依據多目標信息進行傳感器管理屬于多屬性決策問題[3],需要對傳感器接收到的信息進行分析、排序、評價和擇優,最終決策出更切合實際的傳感器管理方案。
目前為止,共有3類基于貝葉斯理論的傳感器管理方法,即基于任務的管理方法、基于信息論的管理方法和基于風險的管理方法[1,4]。其中,基于風險的管理方法重點關注由作戰決策所造成的潛在損失及其發生的概率,具有良好的實際應用價值,已成為傳感器管理領域的研究熱點[5-7]。威脅等級作為重要的目標狀態信息,經常被用來量化決策風險。文獻[1]為了降低空中目標威脅評估結果的不準確性和傳感器輻射所帶來的潛在損失,提出了一種基于風險的多傳感器管理方法。文獻[8]提出了一種基于威脅度的傳感器管理方法,將目標的威脅度視為與目標狀態相關的函數,并對目標威脅度的不確定性進行最小化處理,可應用于目標區域監視與空中交通管制。在此基礎上,文獻[3]基于隨機有限集的多目標濾波器提出一種基于目標威脅度評估的傳感器控制策略。然而,上述文獻在進行傳感器管理決策時均利用目標可觀測的運動特性或目標狀態濾波信息,決策結果嚴重依賴于傳感器對目標的量測信息,但是僅采用目標可觀測的信息卻無法完全表征用于決策的主要信息屬性,例如傳感器對目標量測信息的完整性和信息的質量等。在高雜波、電子對抗等實際戰場環境下,一方面,高功率的電子干擾使得傳感器對目標的量測質量變差,量測誤差變大,甚至會出現目標量測不完整等目標“暫消”現象[9];另一方面,大量的雜波虛警參與到濾波過程與傳感器管理過程,不僅會嚴重影響濾波器對目標數及多目標狀態的估計,還會造成計算效率的急劇下降,嚴重影響傳感器資源分配的合理性和實時性[10]。如何在高雜波、電子對抗等復雜環境下,從獲得的眾多傳感器信息中快速地決策出合理的傳感器管理方案,對多目標跟蹤系統和傳感器決策系統都提出了非常高的要求[11]。
近些年來,基于隨機有限集(Random Finite Set,RFS)的理論被廣泛應用到多目標跟蹤領域[12],其中具有代表性的是概率假設密度(Probability Hypothesis Density,PHD)等濾波算法,該算法可以避免多目標跟蹤中的數據關聯問題,同時能夠實現對目標的檢測與估計[13]。目前,已有許多基于RFS框架的傳感器管理策略[3,14-15],但是這些策略均是在無干擾、低雜波等較為理想的環境下展開的,在高雜波環境下,大量的雜波虛警參與到濾波與傳感器管理過程,導致算法效率嚴重退化,從而影響傳感器分配的實時性。并且在PHD濾波器的應用過程中,通常假設新生目標的PHD是先驗已知的[16]。而在實際中,新生目標的先驗信息一般并不能準確獲取。雖然已有文獻[17]利用傳感器量測信息自適應構建目標出生PHD,但截止到目前,高雜波、電子對抗環境下,結合RFS多目標濾波器進行目標狀態評估的傳感器決策策略,仍然沒有得到系統性的方法研究。
針對上述問題,本文在多目標跟蹤背景下提出了一種基于決策不確定性的傳感器管理方法。首先,建立了基于部分可觀測馬爾科夫決策過程(Partially Observable Markov Decision Process,POMDP)的傳感器管理模型;其次,利用量測驅動的自適應序貫蒙特卡羅PHD(Sequential Monte Carlo PHD,SMC-PHD)濾波器,通過門控方法對量測的屬性進行區分,從而抑制雜波對已有目標跟蹤的影響,獲得對已有目標的高精度濾波;然后綜合考慮用于決策過程的信息完整性(傳感器對目標的探測)、信息的質量(傳感器對目標的量測精度)、信息的內涵(目標的威脅度)等因素,建立了目標決策不確定性的評估方法,并選取決策不確定性最大的目標為優先跟蹤目標;在RFS框架下,基于Rényi信息增量作為傳感器分配的評價函數,在信息增量最大化的準則下實現基于目標決策不確定性的傳感器管理;最后通過仿真實驗從多目標狀態估計精度、計算效率、可靠性3個方面驗證了本文算法的有效性。
值得指出的是,考慮到JDL(Joint Directors of Labs)模型[8],基于威脅的傳感器管理方法構成了從基于JDL1級的傳感器管理邁向JDL2/3級傳感器管理的第一步,而基于決策不確定性的傳感器管理是JDL2/3級傳感器管理的進一步深入。這一轉變使得傳感器管理更貼近戰場的實際需求。
1 基于POMDP的傳感器管理模型
傳感器以雷達為例,典型的任務場景如圖1所示。敵方多個空中目標在遠距離支援干擾飛機的掩護下穿越我方防御陣地。我方部署N部傳感器對敵空中M個目標進行評估,并將獲取的量測信息發送到控制中心,控制中心根據獲得的信息制定相應的傳感器管理方案,并以此控制各傳感器工作[1]。由于傳感器量測的不確定性、雜波、遠距離支援干擾等,控制中心接收到的信息也是不確定的。因此,本文研究的傳感器管理問題本質上是一個不確定信息下的決策問題,可以用POMDP對該問題進行建模[15]。

圖1 典型任務場景Fig.1 Typical task scenario
1.1 傳感器量測模型

zk=[rk,βk]T=ξ·h(xk)+Vk
(1)

(2)
(3)
式中:Vc為光速;B為傳感器波形帶寬;λs為傳感器波長;D為傳感器孔徑直徑。電子干擾條件下,傳感器輸出端信噪比(S/N)j可表示為
(4)
式中:J/S為干擾條件下傳感器輸入端干信比;RSN為無干擾條件下目標的信噪比。
ξ為傳感器的量測系數,是一個隨機數:
ξ={0,1}
(5)
且P{ξ=1}=Pd,P{ξ=0}=1-Pd,Pd為傳感器對目標的探測概率。通常,探測概率Pd是虛警概率Pfa和傳感器輸出端目標信噪比(S/N)j的函數,詳細計算可見文獻[18-19]。
1.2 傳感器管理

(6)
式中:Uk+1:k+H表示向后H步總的分配方案集合。隨著傳感器、目標數量及H的增大,控制集合Uk+1:k+H的勢會呈指數增長,因此為了便于計算,本文基于“近視”(“Myopic”)方案進行傳感器選擇的研究,且假定每個時刻僅使用一個傳感器對所有目標進行跟蹤。
為了從整體上評估跟蹤系統的性能,本文采用基于多目標整體信息增益的傳感器選擇方案,即以多目標信息增益最大化作為評價函數。Rényi信息增量通過比較概率密度函數的近似程度來表示當前狀態下信息的差異,可用于強調某個局部信息,且對多目標先驗、后驗概率密度函數的分布沒有高斯限制,更具靈活性和普適性[20]。因此,本文采用Rényi信息增量作為評價函數。在RFS框架下,假設k-1時刻多目標的先驗概率密度函數和后驗概率密度函數分別為pk|k-1(Xk|Z1:k-1)和pk|k(Xk|Z1:k-1,Zk(ν)),則Rényi信息增量可表示為

[pk|k-1(Xk|Z1:k-1)]1-αdXk
(7)
式中:α為調整2個概率密度函數尾部重合程度的參數,0<α<1。α=0.5強調概率密度函數的尾部,可以對2個相似的概率分布達到最佳辨別,尤其是閃爍噪聲對概率密度函數造成的拖尾效應[20]。因此在本文中,選用α=0.5。
2 自適應SMC-PHD濾波器
典型的PHD濾波器預測方程和更新方程分別為[13]
Dk|k-1(x)=〈Psfk|k-1(x|·),Dk-1|k-1〉+γk(x)
(8)
Dk|k(x)=(1-Pd,k(x))Dk|k-1(x)+
(9)

在上述PHD濾波器中,量測集Zk是唯一的輸入變量,新生目標PHD通常假設是已知的,而在大多數實際問題中該先驗信息并不能獲取。此時,量測集Zk中與新生目標相關的量測對于已有目標的更新是冗余的[16]。特別是在高雜波、電子對抗環境下,新生目標量測中含有大量的雜波虛警,會嚴重影響濾波器對目標數及多目標狀態的估計,不僅會造成傳感器資源的浪費,更會導致濾波算法性能及效率的下降,甚至失效。針對高雜波、電子對抗環境,本文采用自適應的PHD濾波器對不同屬性的量測進行區分并獨立濾波,以降低新生目標量測及雜波虛警對于已有目標濾波的影響,同時顯著提高算法的效率。一般而言,雜波虛警與新生目標量測并不能直接區分,因此本文在最優傳感器選擇時,僅考慮已有目標,對于新生目標,需要在量測被確認后才考慮最優傳感器的分配,從而抑制雜波對傳感器管理決策的影響,避免將有限的傳感器資源浪費在大量的雜波虛警上。
假設已有目標和新生目標生成的量測是可分的,則Zk可表示為
Zk=Zk,b∪Zk,e∪Γk
(10)
式中:Zk,b、Zk,e和Γk分別表示由新生目標、已有目標和雜波虛警生成的量測RFS。同時,用變量ε來標記已有目標和新生目標的PHD[16],即
(11)
為了解決PHD濾波方程中的積分運算問題,本文利用SMC-PHD濾波器處理密集雜波環境下的多目標跟蹤問題,并基于門控方法實現已有目標和新生目標量測的區分。
2.1 已有目標濾波

(12)

(13)
n=1,2,…,Nk-1
(14)

對于已有目標,其更新的PHD可表示為
(15)
式中:
(16)
(17)
對于SMC-PHD濾波器而言,為了緩解粒子退化問題,通常需要重采樣步驟消除具有較低更新權值的粒子。重采樣的粒子數Nk依據當前估計的目標數和分配給每個目標的粒子數η來確定[16]
(18)

一般地,粒子權值越低,其所代表的真實目標信息就越少,特別是在高雜波、電子對抗等復雜環境下。重采樣時消除較低權值的粒子,可以避免大量與目標信息無關的粒子直接參與濾波過程,提高了濾波器的有效性。盡管可能會損失極少的目標信息,但是在本文采用的自適應PHD濾波框架下,這樣的目標信息會在下一次迭代中以新生目標的屬性繼續出現。因此重采樣步驟中,消除較低權值的粒子并不會直接影響目標有效信息的完整性。
2.2 新生目標濾波

n=1,2,…,Mb
(19)

(20)

(21)
其中,每個粒子的初始化權值為
(22)


(23)

2.3 門控方法
與文獻[3]所采用的的標準PHD濾波器相比,上述量測驅動自適應濾波器對已有目標和新生目標獨立濾波,由于排除了雜波等無關量測對已有目標更新的影響,可以顯著改善已有目標的濾波準確性。同時,獨立濾波便于對不同屬性的目標量測分配傳感器,在最優傳感器選擇時,僅考慮已有目標,對于含有大量雜波虛警的新生目標,并不在第一時間考慮,從而降低了雜波等對目標跟蹤及傳感器管理決策的影響。在濾波過程中,由于含有大量雜波虛警的新生目標粒子并未參與到SMC-PHD濾波器的權值更新過程中,而且基于量測的新生目標采樣處理具有較低的計算復雜度,從而可以顯著提高濾波算法的效率,保證了傳感器管理決策的實時性。文獻[10]提出了一種基于統計距離的驗證窗口以區分新生目標量測與已有目標量測,在此基礎上,本文根據新息加權平方和在傳感器量測空間Es上定義一個驗證區域Ω(z),其半徑為
(24)


表1 門控方法偽代碼Table 1 Pseudo code of gating method
上述過程利用了粒子在空間中的分布信息和相應的權值信息,可以顯著提高量測區分的準確性[16]。在濾波初始時刻,所有的量測都被認為源于新生目標。閾值參數τ和γ會對量測屬性有一定的影響。較小的τ和γ,可能會將新生目標量測誤認為已有目標量測,在這些新生目標量測中可能存在雜波虛警等,從而造成濾波精度與濾波效率下降,甚至傳感器資源的嚴重浪費。較大的τ和γ,可能會導致將已有目標量測誤認為新生目標量測,在該時刻最大決策不確定性目標選擇時將不會再考慮該目標,進而可能影響最優傳感器的方案選擇,但是并不會影響算法的有效性。因此,在實際中可以保守地將閾值τ和γ設置為一個相對較大的值。
在上述SMC-PHD濾波過程中,新生目標和已有目標的濾波相互獨立,通過門控方法可以盡可能地排除雜波等無關量測參與到已有目標更新過程中,從而顯著提高雜波環境下已有目標的濾波準確性及算法的效率。雖然雜波量測也可能會被誤用于生成新生目標粒子,但是這樣的粒子絕大多數會在下一次的濾波迭代過程中被自然消除,而真實的新生目標會結合最新的量測被驗證。因此,本文在最優傳感器選擇時,僅考慮已有目標,對于新生目標,需要下一次迭代確認后才考慮。這樣既提高了對已有目標的跟蹤精度,又提高了傳感器管理算法的效率,同時可以避免將有限的傳感器資源浪費在大量的雜波虛警上。
3 基于目標決策不確定性的傳感器管理
對于控制中心而言,傳感器分配的決策結果是不確定的,受很多因素的影響,特別是在高雜波、電子對抗等復雜環境下,高功率的電子干擾使得傳感器對目標的量測質量變差,量測誤差變大,甚至會出現目標量測不完整等目標暫消現象。因此,需要對控制中心接收到的目標信息進行分析、評價和擇優,以最大程度的降低監視區域目標信息的不確定性,最終決策出更切合實際的傳感器分配方案。本文僅從傳感器對目標的探測和跟蹤角度出發,選取易于量化且對決策結果最具影響的因素:信息的完整性、信息的質量、信息的內涵等,對決策的不確定性進行描述。信息的完整性表征傳感器對目標狀態的量測是否完整,雜波、電子干擾等會導致傳感器對目標的探測概率下降,甚至出現目標暫消現象,加大了決策的不確定性。信息的質量表示傳感器對目標量測的精度,量測精度越高,濾波結果越可信,信息的質量就越高,決策的不確定性就越低。信息的內涵表示傳感器對目標的濾波信息中所蘊含的目標的威脅度信息,目標威脅越高,決策不確定性就越高。在本文中,通過將探測概率引入傳感器量測方程,用以模擬傳感器對目標量測的完整性。同時,選取3種常見的目標運動特性(目標速度、航向及距離)對目標威脅度進行建模。并基于自適應的SMC-PHD濾波器估計多目標狀態,分別考慮目標信息的完整性、質量、內涵等因素,依據多目標運動態勢快速評估多目標決策不確定性水平,并從中選擇出當前時刻最大決策不確定性目標,最終決策得到評價準則最優的傳感器分配方案。
3.1 已有目標預測PHD及狀態提取
在自適應SMC-PHD濾波器中,k-1時刻新生目標和已有目標的PHD組成該時刻全部目標的PHD。然而此時的新生目標中含有大量的雜波虛警,需要結合k時刻最新的量測信息進行確認和估計。因此,為了抑制雜波虛警對傳感器分配決策的影響,在最優傳感器選擇時,僅考慮k-1時刻的已有目標,暫時不考慮新生目標。

(25)

3.2 決策不確定性的確立及分配方案的決策


(26)
式(26)表明,目標距離防御區域中心越近,則其威脅度越高,反之亦然。其中,σTSM取決于目標的速度和航向。若目標以較高的速度朝向防御區域中心運動,則TSM函數值應該很高;若該目標朝防御區域中心反方向運動,則較高的速度應該對應更低的TSM函數值。因此可將目標速度和航向相互影響的σTSM描述為[25]
(27)
(28)

綜上可得僅考慮目標的戰術重要性時TSM函數的最終表達式為[25]
fTSM(xi)=
(29)
對于控制中心而言,僅考慮目標的戰術重要性顯然無法完全表征用于決策的信息屬性。通常,目標可觀測的運動特性依賴于傳感器對目標的探測概率和測量精度。高雜波、電子對抗等會顯著影響傳感器對目標量測信息的完整性及信息的質量,這不僅會影響濾波器的精度及效率,也會嚴重影響傳感器管理的決策結果。因此,本文提出了一種綜合考慮信息完整性、信息質量以及信息內涵的ITSM方法,表達式為
fITSM(xi)=
(30)
式中:k1、k2為正常數,且k1+k2=1。顯然,傳感器對目標的探測概率越大,表明信息越完整,目標的決策不確定性就越小;傳感器對目標的測量誤差方差越大,表明信息質量越差,目標的決策不確定性就越大。
(31)
本文以最大決策不確定性目標的Rényi信息增量作為評價指標,目的是使得最大決策不確定性目標的跟蹤性能達到最優,從而降低監視區域內目標的決策不確定性。在本文ITSM函數的計算中,已充分考慮了量測不準確、密集雜波、電子干擾等對決策結果的影響,因此,此處可在檢測概率Pd,k(x)=1以及不考慮量測噪聲、雜波和電子干擾等理想情況下,對每個目標僅生成一個相應的量測。最大決策不確定性目標的理想量測集可表示為
(32)
在執行傳感器分配方案時,按照式(32)所給定的最大決策不確定性目標的理想量測集去對已有目標的預測PHD的粒子集進行更新,則最大決策不確定性目標的更新PHD可近似表示為
(33)
式中:

(34)
則以PHD形式表示的Rényi信息增量評價函數可表示為[20]
(35)
進而得到反映傳感器分配前后最大決策不確定性目標信息增量的評價函數為[20]
(36)
如前文所述,在本文中選用α=0.5,因此評價函數可改寫為
(37)
3.3 算法流程
在SMC-PHD濾波框架下,本文算法的流程如圖2所示。

圖2 本文所提算法流程Fig.2 Algorithm framework proposed in this paper
針對高雜波、電子對抗等實戰環境,本文算法兼顧了目標跟蹤與傳感器管理過程,可以較好地抑制高雜波、電子對抗對多目標跟蹤及傳感器管理決策的影響。首先,本文采用的自適應SMC-PHD濾波器可以基本排除雜波等無關量測對已有目標濾波的影響,從而顯著提高已有目標的濾波準確性,為傳感器管理提供準確的目標信息;其次,考慮到電子干擾對目標量測完整性、精度等的影響,本文綜合考慮了目標信息的完整性、信息的質量及信息的內涵等因素,最大程度的消除了電子干擾對多目標跟蹤及傳感器管理決策的影響,保證了算法在電子對抗環境下的可靠性;再次,本文算法在濾波器的更新過程中,由于大量的雜波虛警等不參與濾波器的粒子權值計算過程,因此可以顯著提高計算效率,算法具有更好的實時性。最后,本文在最優分配傳感器選擇時,僅考慮已有目標,對于潛在的新生目標,在下一次迭代中結合最新的量測被驗證后才開始考慮,從而在提高計算效率的同時降低了雜波虛警對傳感器分配決策的影響。
4 仿 真
4.1 仿真場景
為了評估所提出傳感器管理算法的性能,本文采用文獻[24]中的仿真場景,設定監控區域為半徑為2 000 m的圓,防御中心設定為圓心,共設有3部同類型傳感器,位置分別為(0,0) m、(-1 000,-500) m、(1 000,-500) m,參數如表2所示。

表2 傳感器參數Table 2 Sensor parameters

xk=f(ωk-1)xk-1+GWk-1
式中:
f(ω)=

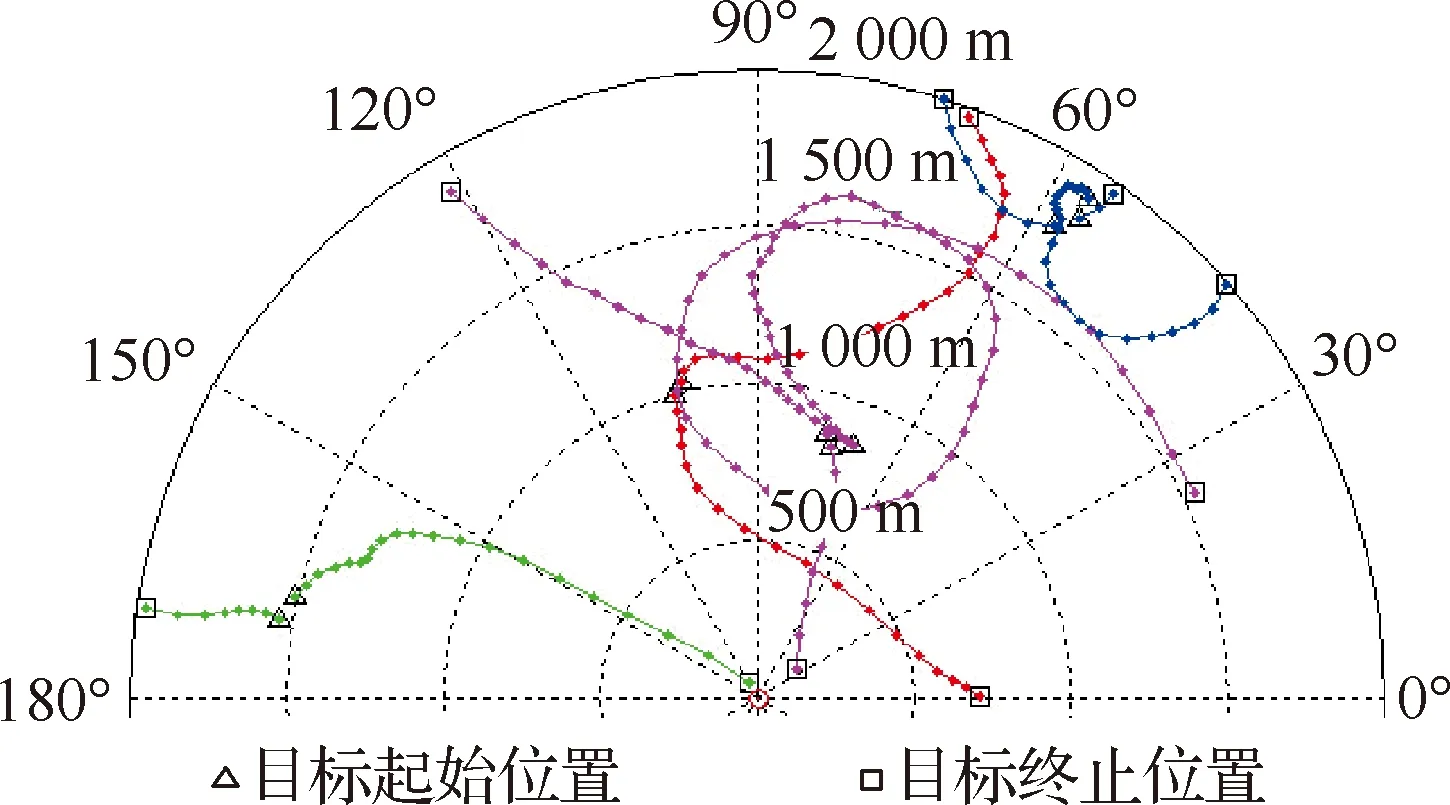
圖3 目標運動真實軌跡Fig.3 Trajectories of true targets
支援干擾機位于(0,2 000) m,參數如表3所示。本文所有仿真均采用MATLAB R2012a,硬件配置為Intel(R) Xeon(R) CPU E5620 @2.4 GHz 2.4 GHz。蒙特卡羅仿真次數為50。在SMC-PHD濾波器的實現過程中,單目標粒子采樣數為1 000,并規定最小采樣數為600。門控方法中,選擇閾值參數τ=100和γ=10-4[16]。目標存活概率Ps=0.99,雜波是一個泊松RFS,且在監控區域內服從均勻分布。設置ITSM函數參數為k0=500,m0=1 250[3],k1=0.4,k2=0.6。另外,本文采用OSPA(Optimal Sub-Pattern Assignment)距離[24]評估多目標跟蹤的性能。其定義為:設多目標狀態集合為X={x1,x2,…,xn},相應的狀態估計集合為Y={y1,y2,…,ym},若n≤m,則OSPA距離定義為

表3 干擾參數Table 3 Jamming parameters

(38)

4.2 仿真實驗
仿真分別從多目標狀態估計精度、計算效率、可靠性3個方面驗證本文算法的有效性,同時仿真中設置了幾組不同的對比方法。方法0是基于決策不確定性的傳感器管理方法,即本文方法。方法1是在本文濾波框架下,僅使用傳感器1進行目標跟蹤的無傳感器管理方法。方法2是在文獻[3]方法框架下,基于多目標整體的信息增量作為評價函數的傳感器管理方法。方法3是文獻[3]提出的基于最大威脅度目標的傳感器管理方法。
設置雜波密度λ=0.000 5 m-2,不同方案的仿真結果對比如下。圖4為4種方法的多目標狀態估計OSPA距離統計對比。在整個仿真過程中,無論干擾是否存在,本文方法的平均OSPA距離都是所有方案中最小的。這是由于本文提出的基于決策不確定性的傳感器管理方法采用自適應的SMC-PHD濾波器,降低了雜波對已有目標濾波的影響;同時,本文方法兼顧傳感器量測信息的完整性、質量及目標的威脅度,可以對目標信息進行擇優,在傳感器管理決策時,排除了雜波虛警的干擾,從而有效抑制雜波、電子對抗對多目標跟蹤及傳感器管理決策的影響。方法1采用無傳感器管理的方法,在電子干擾情況下(10~80 s)近乎失效,其平均OSPA距離最大,這也說明了電子干擾對傳感器管理決策的嚴重影響。方法2的跟蹤效果整體上要略優于方法3,這與文獻[3]中的研究結果也是完全吻合的。同時可以看出,在監視區域僅存在雜波虛警的情形下(85~100 s),本文方法可以基本消除雜波對多目標跟蹤的影響,其他方法由于并未對高雜波進行有效的抑制,對目標數的估計存在較大的誤差,導致其平均OSPA遠高于本文方法。

圖4 不同方法OSPA對比Fig.4 Comparison of OSPA in different methods
圖5為本文方法與方法3方法對目標數估計的對比。在整個仿真過程中,方法3方法總體上對目標數過估計,這是由于方法3方法無法有效抑制雜波虛警,將虛警誤判為真實目標,不僅影響真實目標的跟蹤精度,而且嚴重浪費傳感器資源。與之相比,本文方法總體上可以做到對目標數的正確估計。一方面是由于本文提出的傳感器管理方法兼顧目標的威脅度和傳感器信息的完整性、質量等,可以對目標信息進行擇優,并優先跟蹤決策不確定性最大的目標,避免了方法3中目標信息考慮不全面而造成的目標狀態估計性能退化的現象;另一方面,本文采用的自適應SMC-PHD濾波器不僅可以避免傳統PHD方法對于新生目標先驗信息的要求,而且可以較好的抑制雜波對已有目標的影響,顯著提高已有目標的跟蹤精度。

圖5 不同方法目標數評估對比Fig.5 Comparison of target number estimation in different methods
單次仿真實驗時,方法0與方法3的傳感器選擇分別如圖6和圖7所示。在電子干擾情形下,由于傳感器1處于干擾機的正前方,干擾機對傳感器1形成主瓣干擾,因此與方法3相比,本文方法更多選擇干擾較弱的傳感器2或傳感器3。特別是在監視區域內無真實目標的情況下(85~ 100 s),本文方法可以較好地識別雜波虛警,避免將有限的傳感器資源浪費在雜波虛警上,同時可以在整體上獲得較低的平均OSPA距離。

圖6 方法0傳感器選擇Fig.6 Sensor selection result of method 0

圖7 方法3傳感器選擇Fig.7 Sensor selection result of method 3
圖8為本文方法與方法1、方法3在計算效率上的對比。由于方法1并未采用傳感器管理,因此其計算效率最高。在無干擾情形下,本文方法的計算效率與方法1基本相當,這說明本文的傳感器管理算法并未造成過多的計算負擔。特別地,在整個仿真過程中本文方法的計算效率都明顯高于方法3,其平均計算時長降低了74.3%,這一方面是由于本文采用的自適應SMC-PHD濾波器僅對已有目標進行更新,而且基于量測的新生目標采樣處理具有較低的計算復雜度,可以顯著提高濾波算法的效率;另一方面,本文方法在最優傳感器的選擇時僅考慮已有目標,并未在第一時間考慮含有大量雜波虛警的新生目標,從而顯著提高傳感器管理的效率。

圖8 不同方法計算時長對比Fig.8 Comparison of calculation time in different methods
算法的可靠性主要通過整個仿真過程中雜波密度和干擾功率對平均OSPA的影響來驗證。本文借鑒文獻[3]和文獻[26]中對于雜波密度的處理方式,分別取雜波密度值為0.000 002 2[3]、0.000 01、0.000 1、0.000 5、0.001、0.005 m-2,并設置2組對比情形。情形1為整個仿真周期0~100 s,情形2為僅考慮電子對抗存在時的仿真時段10~80 s。本文方法與方法3在不同雜波密度不同情形下的平均OSPA對比如圖9所示。可以看出,在不同的雜波密度下,本文方法的平均OSPA均低于方法3,在雜波密度較低(0.000 002 2)時,本文方法的平均OSPA略低于方法3,此時影響OSPA 的主要因素是電子干擾,而本文方法不僅可以抑制雜波,還可以抑制電子干擾對多目標跟蹤及傳感器管理決策的影響。在雜波密度為0.000 5 時,本文方法效果最為明顯,平均OSPA相較于方法3顯著降低。在高雜波密度(0.005)下,本文方法的平均OSPA甚至低于雜波密度為0.000 1時的方法3方法,從而驗證本文算法在高雜波環境下的可靠性。在2組不同的情形下,當雜波密度小于0.000 1時,方法3在情形1下的平均OSPA低于情形2,而當雜波密度大于0.000 1時,正好相反。這是因為對于方法3而言,當雜波密度較低時,對平均OSPA影響較為顯著的是電子干擾,當雜波密度較高時,雜波密度對平均OSPA的影響更為顯著。而本文方法在整個仿真過程中,2種情形下平均OSPA隨雜波密度的增長趨勢基本相同,這也證明了本文方法對雜波具有很好的抑制作用,在高雜波環境下具有較高的可靠性。

圖9 不同情形下平均OSPA隨雜波密度變化的對比Fig.9 Comparison of average OSPA variation with clutter density in different situations
圖10為本文方法與方法3的平均OSPA隨干擾功率的變化對比。可以看出在整個干擾功率變化過程中,本文方法的平均OSPA明顯小于方法3。在干擾功率小于100 W時,本文方法的平均OSPA基本保持不變,這是由于本文提出的基于決策不確定性的傳感器管理方法可以兼顧目標的威脅度和傳感器信息的完整性、質量等,可以在電子干擾環境下合理的選擇量測信息完整的、信息質量高的傳感器對目標進行跟蹤,從而最大程度地消除了干擾對目標狀態估計的影響。當干擾功率較大時(>100 W),2種方法的平均OSPA均隨著干擾功率的增大而增大,但是與方法3相比,本文方法的增加趨勢相對緩慢,平均增長速率約為方法3的74%,這是因為電子干擾具有方向性,同樣的干擾功率下,干擾機對不同方向的傳感器的干擾效果不同。而本文方法在傳感器管理時,需要在多個不同方位的傳感器中綜合選擇信息更完整的、信息質量更高的傳感器對目標進行跟蹤,可以較為有效的抑制電子干擾對目標跟蹤的影響,驗證了本文方法在電子干擾環境下的可靠性。
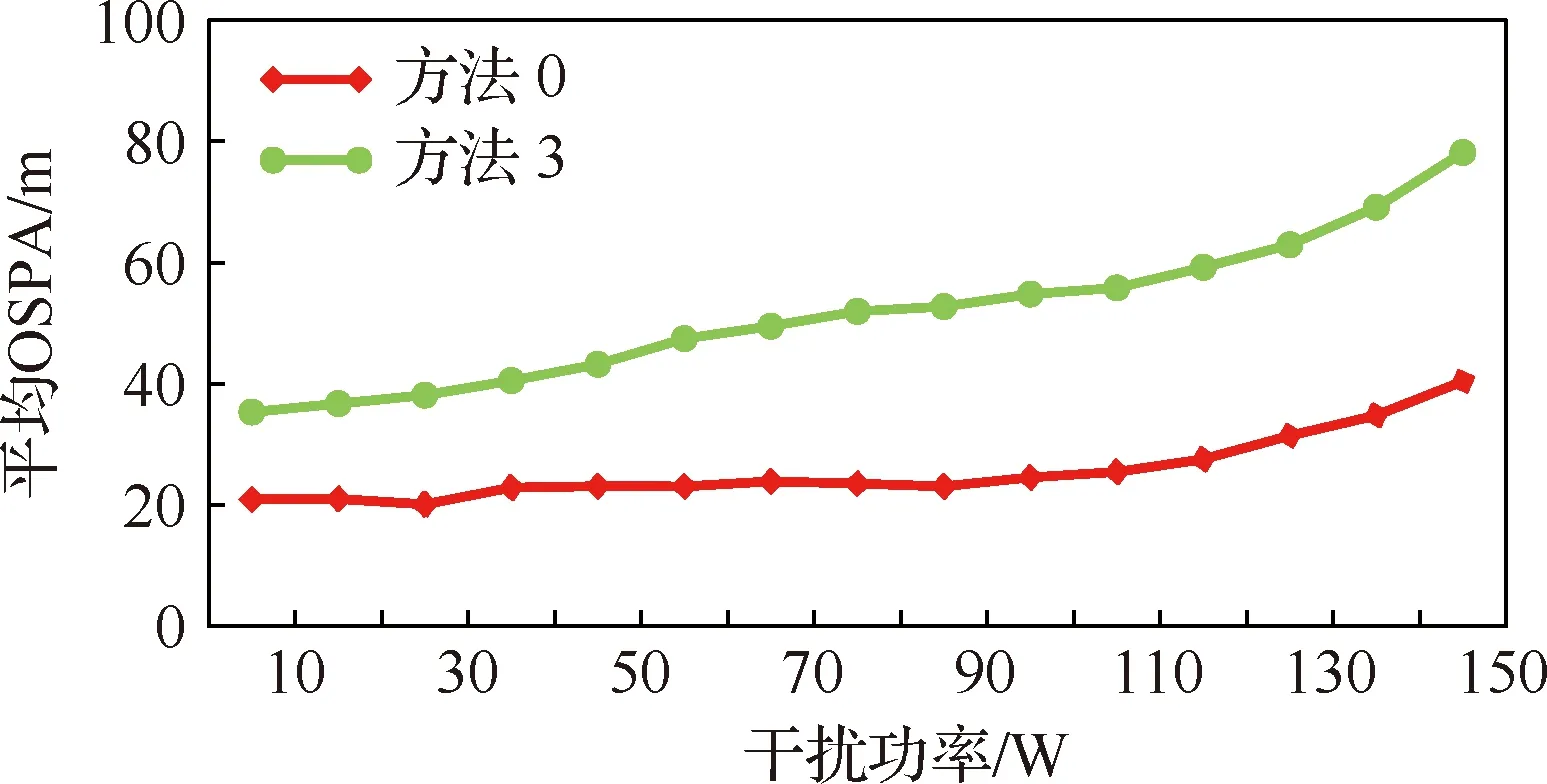
圖10 平均OSPA隨干擾功率變化的對比Fig.10 Comparison of average OSPA variation with jamming power
5 結 論
本文針對高雜波、電子干擾環境,在自適應SMC-PHD濾波框架下提出了一種基于決策不確定性的傳感器管理方法。與基于威脅的傳感器管理方法相比,結論如下:
1) 本文方法可以較好地抑制電子干擾、雜波對多目標估計、傳感器管理決策的影響,相比于對比方法,其計算效率和跟蹤精度明顯提升。
2) 在不同雜波密度、干擾功率下,本文方法性能均優于對比方法,從而驗證本文算法在高雜波、電子對抗環境下的可靠性。
本文僅從傳感器對目標的探測和跟蹤角度出發,對傳感器決策的不確定性進行描述。在今后的研究中,可以在傳感器管理中考慮更多的影響因素,如射頻隱身、數據鏈時延等。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
