船舶離靠泊輔助系統的發展與展望
2020-11-03 09:06:00徐承軍黃慶林吳建曲
港口裝卸 2020年5期
徐承軍 黃慶林 吳建曲
1 武漢理工大學物流工程學院 2 武漢理工港航科技研究院有限公司
1 引言
隨著全球海運量不斷增長和船舶大型化、高速化發展,航道通航密度日益增大,海損事故頻發,2017年來,已發生多起岸船碰撞事故,嚴重影響了碼頭裝卸效率。造成離靠泊事故頻發的原因主要有[1]:①低船速下舵效減弱,船體更易受風、流的影響,容易失速或入泊角過大;②高大的船體影響操船員觀測,船舶上層建筑或船舷易與岸上裝卸設備碰撞;③超重船體的巨大慣性帶來的操船延時等。僅依靠操船者的經驗離靠泊已難以應對日益繁忙的港口作業要求。由測速、測距、定位功能發展而來的船舶輔助離靠泊系統,增強了船舶運動的感知能力,能有效降低碰撞事故發生率。
首先對船舶離靠泊系統進行介紹,其次對國內外常用的幾種船位探測技術進行對比分析,并總結各自的特點;介紹自動靠泊系統的研究進展和成果,最后對船舶離靠泊系統的發展進行展望。
2 船舶離靠泊輔助系統構成
船舶離靠泊輔助系統(Berthing Aid Systems,BAS,以下簡稱靠泊系統)的核心是對入港船舶的靠泊信息進行采集,增強操船者或控制系統對船舶運動狀態(船舶位置、船艏離岸距離、船艉離岸距離、船艏靠岸速度、船艉靠岸速度、入泊角度等)的感知。根據船位探測裝置安裝位置不同,靠泊系統可分為岸基(見圖1)和船載(見圖2)兩類。

圖1 岸基式靠泊系統組成
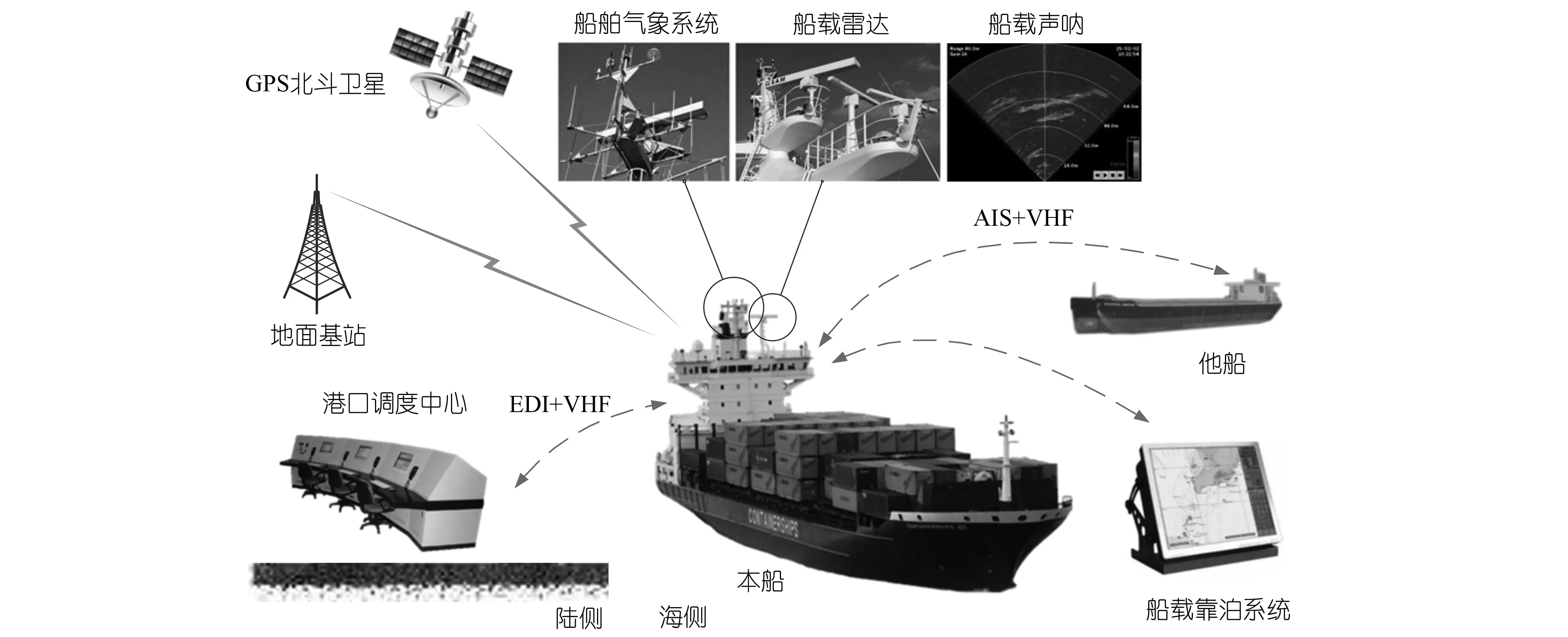
圖2 船載式靠泊系統組成
在靠泊系統基礎上還可增加環境監測系統(Environmental Monitoring System,EMS)、纜繩載荷監測系統(Mooring Load Monitoring System,MLMS)、船岸通訊系統(SSL)、快速脫纜監控系統以及船-岸碰撞緩沖裝置等。實際上,靠泊系統是船位探測系統、環境監測系統與船岸通訊系統的廣義概念。環境監測系統用于監測靠泊水域氣象條件(風向、風速、流向、流速、溫度、濕度、潮位等);對于岸基靠泊系統,船岸通訊系統多是利用岸邊的顯示屏、聲光報警器向船舶發送靠泊信息(艏/艉離岸距離、靠岸速度及示警),而對于船載靠泊系統則直接顯示在船載或引航員便攜設備上。
3 靠泊系統中的船位探測技術
現有的船位探測技術都是在直接或間接距離測量的基礎上發展起來的。前者是利用距離傳感器直接進行岸-船距離測量,后者是通過衛星進行衛星-船舶、衛星-地面基站測距,再通過坐標轉換為岸-船、船-船距離。通過船位測距可進一步計算出船跡、船速與航向信息。李寶玉[2]根據探測技術的不同,將靠泊系統分為聲波靠泊與電磁波靠泊兩種,隨后又發展出了采用機器視覺技術的視覺靠泊。
聲納、微波雷達、紅外等技術發展和運用較早,但都存在穩定性及精度較低的缺陷;空氣波由于有效作用距離短、動態反應緩慢[3],已漸被淘汰;而紫外光尚未有成熟應用,目前應用較多的是以激光測距為主的岸基靠泊系統和基于GPS的船載靠泊系統。以下將對激光、GPS和視覺靠泊的技術特點進行說明。
3.1 激光靠泊
3.1.1 激光測距靠泊
1992年起激光靠泊輔助系統(Laser Docking System,LDS)已經廣泛應用于世界各大港口,它的出現對上述靠泊系統產生了巨大的沖擊。該系統的基本思路是在岸上相隔一定距離固定2臺激光傳感器,實現船舶艏艉高精度的實時測距、測速。
國外較早的應用有英國Strain stall、丹麥Marimatech、澳大利亞Harbour Marine等公司的靠泊設備,國內對激光靠泊也有大量研究,涉及系統設計、安裝及應用等方面,其中較完整的有大連理工大學[4]、寧波世科光公司的相關研究與產品。
相較于其他形式的靠泊設備,激光靠泊具有測量精度高,動態反應靈敏,作用距離遠的優勢,但激光探頭多采用垂直岸線的固定安裝方式,尋找目標的能力較差,當船舶采取角度靠泊時,測距點會發生漂移,測量數據誤差過大。文獻[5]提出了一種激光探頭升降裝置,解決了部分船型兼容的問題,但難以對運動目標進行跟蹤測量、受船舶大小及靠泊方式的限制,多在海港的平行靠泊頂推橫移階段啟用,而內河港口則因水位變化較大可能超出升降范圍。周紅進[6]利用岸基自動跟蹤全站儀對準船艏艉端的目標棱鏡,采用四點測向測距方式,可高精度同步測量入泊船舶。Krupp Atlas Elektronik公司研制的Alats Polarifx激光定位系統,將微處理機技術與激光跟蹤設備相結合,用來測量從跟蹤站到浮游視標的距離和方位角。
3.1.2 激光掃描靠泊技術
三維激光掃描儀通過高速激光掃描測量,可以快速、大量的采集被測對象表面的空間點位信息,已在產品零件的檢測與逆向工程、古建筑及地形的三維重構得到了廣泛運用,然而目前尚無成熟的基于三維激光掃描技術的靠泊系統。ARJ Ruiz[7]利用船艏側置的激光雷達,結合多目標跟蹤技術(MTT)可實時獲取水面其他船舶、浮標、橋墩與閘室的點云圖像,有效監測范圍已達500 m。閆曉飛[8]則在岸基方面做了大量的研究,并通過岸基三維激光掃描儀獲取的船體點云數據,確定船舶二維船舷,從而計算出船舶運動參數。
三維激光掃描靠泊解決了點式激光靠泊尋找目標難的問題,同時獲取的船體信息或可作為碰撞預警的決策輸入,但仍存在下列問題亟待解決:
(1)三維激光掃描設備多采用固定安裝,且對靜止目標進行場景(靜止-靜止)重構,由船觀岸(運動-靜止)和由岸觀船(靜止-運動)兩種監測方式易造成點云散亂。
(2)即使加快掃描速率,從海量點云數據中提取目標船舶輪廓與靠泊信息,需要一種快速點云處理算法,當船靠近時,這種“快速”則近乎實時,但若犧牲點云密度或降維處理,設備性能則顯過剩。
(3)在三維激光掃描設備中,國外廠商具有絕對的市場占有率,軟、硬件均難以訂制或二次開發,比如成本、掃描方式、接口權限、供電和防護等限制都注定了其在港口及船舶上運用尚需時日。
近年來,多線(16線、64線,128線)激光雷達技術的成熟與成本降低,使得無人駕駛技術飛速發展,移植這一技術于船舶靠泊監測也成為一個思路[9],相較于上述的三維激光掃描儀,激光雷達具有更快的響應速度與友好的二次開發環境,很可能是下一階段的研究熱點。
3.2 基于GPS靠泊輔助技術
GPS衛星導航儀可以為行船提供準確位置信息,民船用GPS的精度通常可以達到5~10 m,基本可滿足船舶在廣闊海域航行需求。當船舶航行至較狹小區域時(如港口航道、港池),因風、流、水位的影響,容易造成航行中斷或碰撞事故,目前多采用雙頻、雙天線、差分GPS(DGPS)和實時動態差分法(Real-time kinematic,RTK)等技術來提高GPS的定位精度。
新西蘭Navicome Dynamics公司的便攜式引航設備HarborPilot,以GPS雙天線接收機以及S-57電子海圖作為系統技術基礎。丹麥Marinmateck公司的E-Sea Fix CAT 2&3,定位終端由雙頻接收機組成,通過UHF、GPRS或者UMTS等方式無線連接顯示終端。Oda[10]、織田[11]等將DGPS技術用于船基式靠泊儀,實現船舶高精度定位。2012年,集美大學自主研發的基于DGPS的大型船舶靠離泊裝備,采用單點與多點DGPS相結合的組合定位技術,實現高精度的船舶靠泊信息獲取[12];接著又以北斗導航系統開發了船載引靠泊系統,填補了我國在船基高精度引航靠泊系統研究的空白[13]。高齊生[14]利用RTK高精度的定位技術,為船舶在提供持續、高效的靠泊參數。
目前,GPS/DGPS幾乎覆蓋所有船舶,再結合船載傳感器可獲取船舶姿態與航行數據,為船舶定位、導航、監控和管理帶來了極大的方便。相比其他靠泊技術,GPS靠泊擁有更多的用戶與技術基礎,可應對不同船舶、不同靠泊方式、不同碼頭類型的全天候航行與離靠泊作業。同樣,船舶越接近岸,對靠泊信息的準確性與實時性要求越高,目前的精度仍待提高,且只能獲取船位信息,無法獲取船舶與岸上設備可能碰撞部位的信息。再者,為保我國水運和航道的戰略安全,須盡快建立起基于北斗導航衛星系統(Bei Dou Navigation Satellite System,BDS)的靠泊系統。
3.3 計算機視覺引導靠泊
目前利用計算機視覺技術,可提取道路影像中的道路線和路標,助力車輛的無人駕駛,但在船舶自動駕駛和靠泊系統中運用還較少。臺灣海洋大學的相關學者基于圖像處理技術,計算實驗船舶與目標物的距離及相對方位,提出了基于模糊控制法[15]、內模式控制法[16]的船舶視覺靠泊的控制方法。Yoshiaki Mizuchit團隊[17]在船模裝載多相機單元跟蹤岸上指定目標來確定船舶的運動參數,實驗基本參數為相機間的基線長度l,艏艉相機單元的距離L,目標距離D在20~100 m時,平均誤差小于1%,在實際船舶上(L,l)可以取的更大,測距精度將會更高,該系統完全有可能達到靠泊作業速度測量的精度要求。董亞力[18]則通過岸基視頻圖像,提取船輪廓特征,并結合關鍵點的幀掃描技術進行關鍵點判斷和危險狀態識別預警。
3.4 各系統對比
綜上所述,各類靠泊系統參數對比見表1,優缺點對比見表2。

表1 船位探測技術性能參數對比

表2 幾種船位探測技術優缺點及現狀對比
另外,岸基靠泊系統存在明顯的缺點:①監測距離短,基本只覆蓋本泊位水域,且只監測靠泊本泊位的船舶;②岸船通訊形式單一(岸邊屏幕),雨霧天氣影響觀察;③通常1個泊位需要安裝1套系統,成本較高;④設備笨重,維護不便。船載靠泊系統則具有更高的主動性與實時性,同時設備的利用率也優于岸基系統,如環境監測系統、聲納、雷達與GPS等都兼具航行與靠泊功能。但岸基以“旁觀者”監測,對減少操船者的主觀錯誤、記錄船舶靠泊過程有著重要作用。
4 自動靠泊技術
自力靠泊,即依靠船舶本身安裝的動力系統(如推進器、舵、錨)完成靠泊操作,但受港區水文氣象條件限制,船舶失控的概率較大,常見于萬噸級以下船舶。大型船舶大多都是強制引航,由拖輪協助靠泊,即他力靠泊,但無疑增大了人為失事的概率。據統計,在船舶碰撞事故中,89%~96%的事故可歸因于人的自身原因[19],這也促使國內外對自動靠泊技術進行探索。
相關控制理論及船模實驗已經驗證了其可行性[20],而無人水面艇(USV,Unmanned Surface Vessel)集環境感知、自主航行、遠程協助為一體,在巡邏偵察、海事救援、氣象探測等方面具有廣闊前景。柳晨光[22]對USV的發展現狀與展望做了詳細的分析,文中提及的MUNIN項目組以船長為200 m的散貨輪為研究對象,可完成自主航行、自動控制、岸基遠程控制和物標探測等工作[23]。K.U.Yang[24]由船岸距離監測,獲取船舶靠泊參數,通過控制系泊絞車拖拽船體,省去拖輪頂推的方式實現了自動靠泊。
2018年,挪威海事機構與海岸管理局共同簽署了將特隆赫姆峽灣開發為“全球首條專門測試無人駕駛船舶的航線”的協議,技術和政策的支持使自動駕駛技術快速發展。Norled公司旗下“Folgefonn”號渡船已經成為世界上第一艘安裝自動靠泊系統(Auto Docking System)的渡船,包括轉向和推進在內的所有船舶操作,都由軟件自動控制完成,提高了推進器的利用率和泊船效率。Yara與KongSberg共同打造了全球首艘純電動自動駕駛集裝箱船Yara Birkeland,并計劃于2020年轉向全自動控制駕駛[25]。
大型船舶的無人化和自動靠泊技術涉及法律法規、技術論證、實驗及配套設施等諸多環節,道路仍很漫長。
5 展望
離靠泊事故頻發,損失極大,無論是船方、港方還是海事部門都對離靠泊作業提出了更高的要求,現有靠泊系統的功能與精度已顯不足,從靠泊系統實際使用需求和技術發展來看,其未來研究重點應該集中在以下3個方面。
5.1 多技術集成的船位監測
單一的船舶測位、定姿系統無法兼顧精度與速度,而精度和速度又與船舶離岸距離相關,靠泊監測過程是一個由遠到近、由間斷粗略測量到實時精確監測、由多目標(靠泊船舶與其它行船)觀測到單目標(靠泊船舶)跟蹤測量的過程。這一過程的監測需發揮上述靠泊系統各自的優勢,如離岸較遠時利用GPS定位,船舶靠近時采用激光跟蹤測量,實現多技術集成的監測。
5.2 港-船-機協同安全監測
靠泊碰撞事故可大致分為船(靠泊船舶)-岸(碼頭)碰撞、船-機(岸邊裝卸設備)碰撞與船(靠泊船舶)-船(其他行船)碰撞3類。現有的靠泊系統通過監測入泊角與靠泊速度來避免船-岸、船-機碰撞。岸基式靠泊系統由于只針對單目標(靠泊船舶)監測,無法實現船-船避撞,船載式靠泊系統則可以依靠GPS或雷達避碰,但超高超寬船體仍會與岸邊裝卸設備相撞。所以,僅靠岸-船相對位置的二維監測已不能避免碰撞發生,需要根據船舶離岸距離做到點(船、機位置)-體(船、機姿態)-局部(船、機易碰撞部位)的一體化監測,模糊岸-船邊界,在靠泊、裝卸和離泊的全過程中監測船-岸-機三者的空間位置與三維形態,實現港-船-機協同安全監測。
5.3 跨平臺共享,發掘深層功能
為實現上述功能,需結合AIS、VTS、三維數字化航道、船舶大數據等先進技術保障靠泊船舶在航道內的通行安全。依靠快速三維重構或參數建模技術,再結合船、機位置姿態驅動生成靠泊模型。引入專家系統,將先驗知識與操作規程具化到靠泊系統中,依據當前泊位信息、船舶自身信息(船舶類型、外形及載重)、船位信息和水文信息,提前模擬船舶軌跡與可能碰撞的位置,從而提供最優靠泊路徑及避撞策略。加強岸-船、船間通訊,減短決策-指令-動作間的延遲,降低碰撞事故發生率,提高靠泊效率,并為自動導航與自動靠泊技術積累技術。
6 結語
通過歸納、梳理國內外靠泊輔助系統的文獻資料,對比、分析了各系統中船位探測技術的特點與現狀,立足前沿技術,展望了靠泊輔助系統的發展趨勢。隨著監測技術的融合與發展,船舶定位、定姿精度不斷提高,為船舶入港引導、避碰提供基礎支撐,在不久的將來,有望實現大型船舶自動、無人靠泊的目標。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
