光纖陀螺溫變效應(yīng)誤差抑制方法研究
2020-10-28 05:05:30路彬彬張登偉
壓電與聲光 2020年5期
關(guān)鍵詞:效應(yīng)
李 陽,黃 鑫,路彬彬,張登偉
(1. 南京電子技術(shù)研究所,江蘇 南京 210000;2. 浙江大學(xué) 光電科學(xué)與工程學(xué)院 現(xiàn)代光學(xué)儀器國家重點實驗室,浙江 杭州 310027)
0 引言
光纖陀螺(FOG)是慣性導(dǎo)航領(lǐng)域中的重要傳感器,其高精度、全固態(tài)、啟動快及動態(tài)范圍大等優(yōu)點符合當(dāng)前軍事應(yīng)用的需求。目前由于溫度場導(dǎo)致的非互易性零偏漂移誤差限制了光纖陀螺精度的進(jìn)一步提升[1-5],Lefevre將這一現(xiàn)象稱為光纖陀螺溫變效應(yīng)誤差[6-7],因此,解決這一問題已成為光纖陀螺進(jìn)一步發(fā)展的關(guān)鍵。
溫變效應(yīng)誤差的抑制方法有硬件優(yōu)化和軟件補(bǔ)償。硬件優(yōu)化主要通過改善熱結(jié)構(gòu)設(shè)計,增加溫控[8],采用新的光纖環(huán)繞法[9-10]和工作原理[11-12]等方法實現(xiàn),但會帶來質(zhì)量、體積增加,工藝復(fù)雜,光纖環(huán)結(jié)構(gòu)強(qiáng)度下降等問題。軟件補(bǔ)償法易于工程實現(xiàn),且抑制效果較好,其中線性誤差模型[13-15]易于工程應(yīng)用,但依賴于精確的誤差模型和溫度信息。采用神經(jīng)網(wǎng)絡(luò)等機(jī)器學(xué)習(xí)方法[16-17]可自適應(yīng)進(jìn)行最優(yōu)模型識別,但受限于機(jī)上/彈上計算機(jī)運(yùn)算資源,一般應(yīng)用于非實時的數(shù)據(jù)后處理場合。通過經(jīng)驗?zāi)B(tài)分解,結(jié)合曲面擬合回歸和自適應(yīng)模糊推理聯(lián)合建模的方法,可獲得較好的補(bǔ)償效果[18]。查表補(bǔ)償法[19]具有實現(xiàn)簡單,無需精確建模,實時性和補(bǔ)償效果好的優(yōu)點,具有很大的工程應(yīng)用潛力。
本文通過光纖陀螺溫變效應(yīng)誤差的原理分析與建模,提出基于查表法的啟動溫變效應(yīng)誤差抑制方法。通過實驗驗證其誤差抑制效果,提供了一種有效的實時工程應(yīng)用方案,對提升光纖陀螺的精度水平和系統(tǒng)應(yīng)用性能具有重要意義。
1 方法原理
1.1 光纖陀螺溫變效應(yīng)誤差模型
光纖陀螺溫變效應(yīng)誤差體現(xiàn)為光纖陀螺內(nèi)部溫度場變化時的輸出漂移誤差,由廣義Shupe效應(yīng)、標(biāo)度因數(shù)的溫度效應(yīng)和檢測通道的溫度效應(yīng)組成,其中后兩種效應(yīng)可通過標(biāo)度因數(shù)溫度標(biāo)定、半波電壓閉環(huán)控制和選擇低溫度系數(shù)電子元器件得到很好抑制。因此,光纖陀螺溫變效應(yīng)誤差主要來源為廣義Shupe效應(yīng),其誤差模型如圖 1所示(圖中Δφs=Ω·Ko為薩格奈克相位差),對應(yīng)光纖陀螺的輸出為
D=(Ω·Ko+Δφe)·Ke
(1)
式中:Ω為輸入旋轉(zhuǎn)角速率;Ko、Ke為光學(xué)、電學(xué)標(biāo)度因數(shù); Δφe為廣義Shupe效應(yīng)引起的加性溫變效應(yīng)相位誤差。
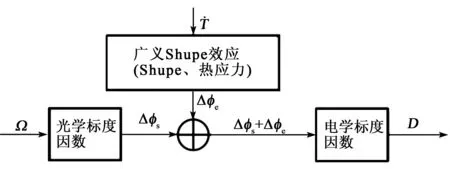
圖1 光纖陀螺溫變效應(yīng)誤差源
廣義Shupe效應(yīng)包括傳統(tǒng)的Shupe效應(yīng)及熱應(yīng)力效應(yīng),具體表示為
z,t)]·(L-2z)dz
(2)
由式(2)可知,當(dāng)光纖環(huán)中相對光纖中點對稱位置的溫變速率相同時,即可消除廣義Shupe效應(yīng)誤差。目前工程上采用四極對稱繞法光纖環(huán)來抑制廣義Shupe效應(yīng),但由于光纖直徑限制,各層光纖間并非理想的關(guān)于光纖環(huán)中點對稱,存在殘余的溫變效應(yīng)誤差,在高精度光纖陀螺中不可忽略。
1.2 光纖環(huán)等效非穩(wěn)態(tài)溫度場分析
已知各個時刻光纖環(huán)溫度場分布,即可根據(jù)式(2)得到溫變效應(yīng)誤差。光纖環(huán)各層光纖緊密纏繞,可看作一個性質(zhì)均勻的整體,其主要的熱傳遞方式是熱傳導(dǎo)。同時光纖環(huán)熱分布為環(huán)形對稱形式,且在軸向上均勻分布,可只針對光纖環(huán)截面進(jìn)行二維熱傳導(dǎo)分析。建立簡化的一維光纖環(huán)分析模型如圖 2所示。圖中,d為光纖環(huán)光纖截面寬度,內(nèi)壁、外壁分別位于面向熱源和背向熱源的一側(cè)。
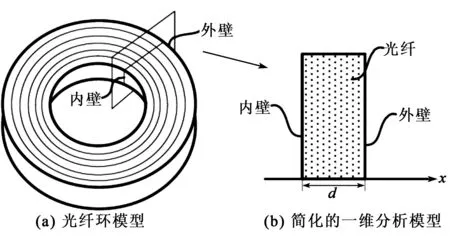
圖2 簡化一維光纖環(huán)分析模型
對于系統(tǒng)應(yīng)用中的光纖陀螺,光纖環(huán)外部還包含有隔熱層、外殼結(jié)構(gòu)及外部的系統(tǒng)結(jié)構(gòu),可等效為多個導(dǎo)熱特性不同介質(zhì)層的疊加并看作一個整體。光纖陀螺啟動后在有限時間段內(nèi),光纖環(huán)內(nèi)表面所受熱作用可看作只滲透到有限厚度范圍內(nèi),可等效為“半無限大物體”,對應(yīng)的等效模型如圖 3所示。圖中R為光纖環(huán)內(nèi)側(cè)半徑。
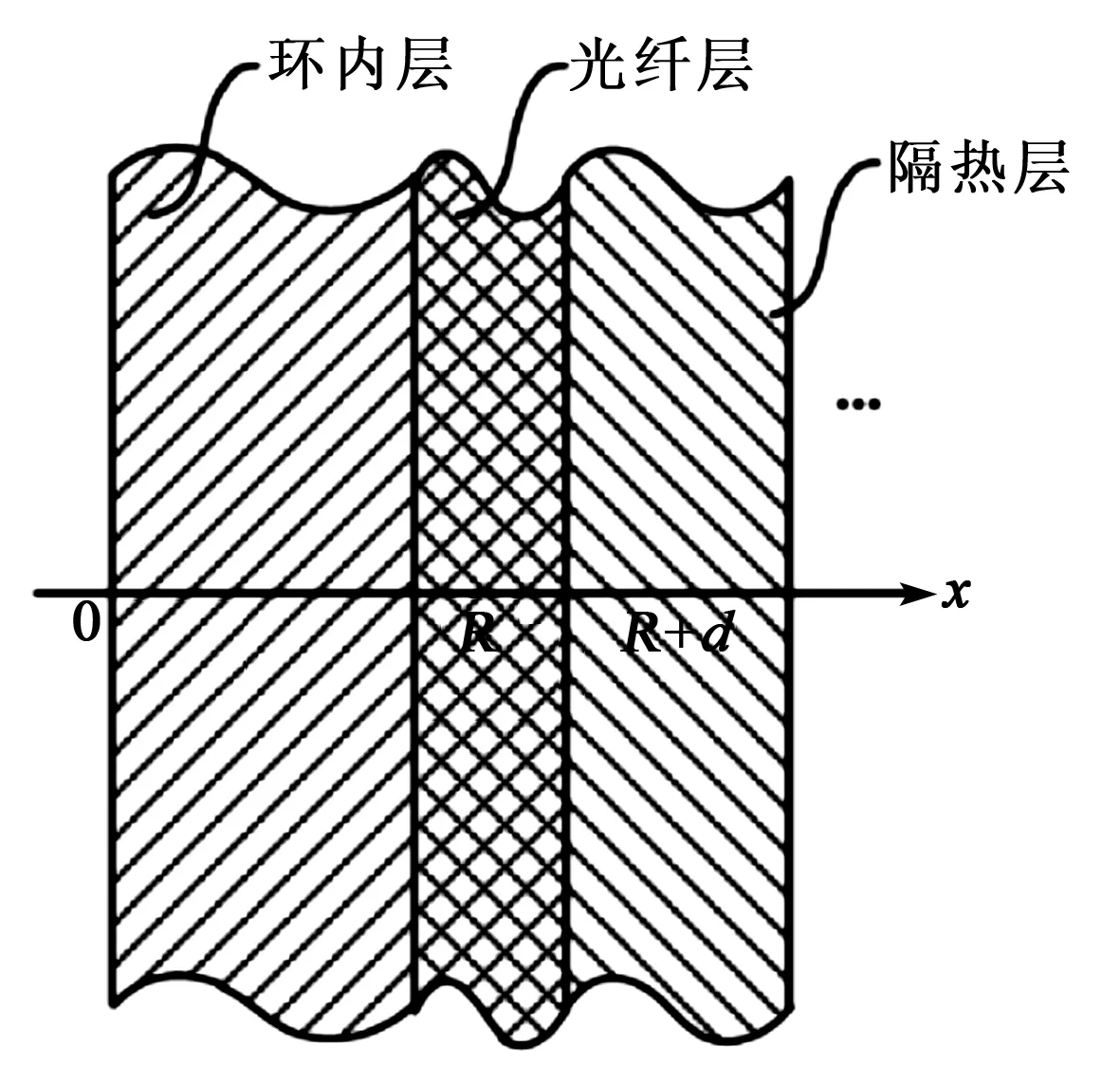
圖3 光纖環(huán)半無限大物體等效分析模型
光纖陀螺初始溫度為T0,啟動時x=0位置處的邊界溫度突然提高到Tw并保持不變。引入過余溫度θ=T-T0(T為光纖環(huán)內(nèi)的溫度),結(jié)合一維導(dǎo)熱微分方程獲得光纖環(huán)非穩(wěn)態(tài)導(dǎo)熱問題的數(shù)學(xué)描述為
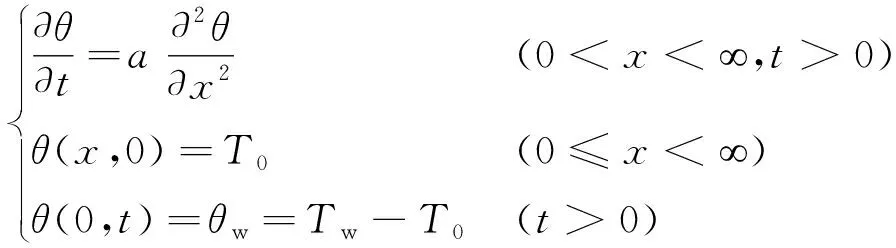
(3)
式中:a為熱擴(kuò)散系數(shù);t為時間。初始條件為T(x,y,z,0)=T0。式(3)的解為
(4)
各個位置處溫度的時間梯度為
(5)
將式(5)代入式(2)可獲得光纖陀螺啟動過程的溫變效應(yīng)誤差模型,下面基于四極對稱光纖環(huán)進(jìn)行誤差模型的推導(dǎo)與查表法抑制原理的闡述。
1.3 光纖陀螺溫變效應(yīng)查表法抑制原理

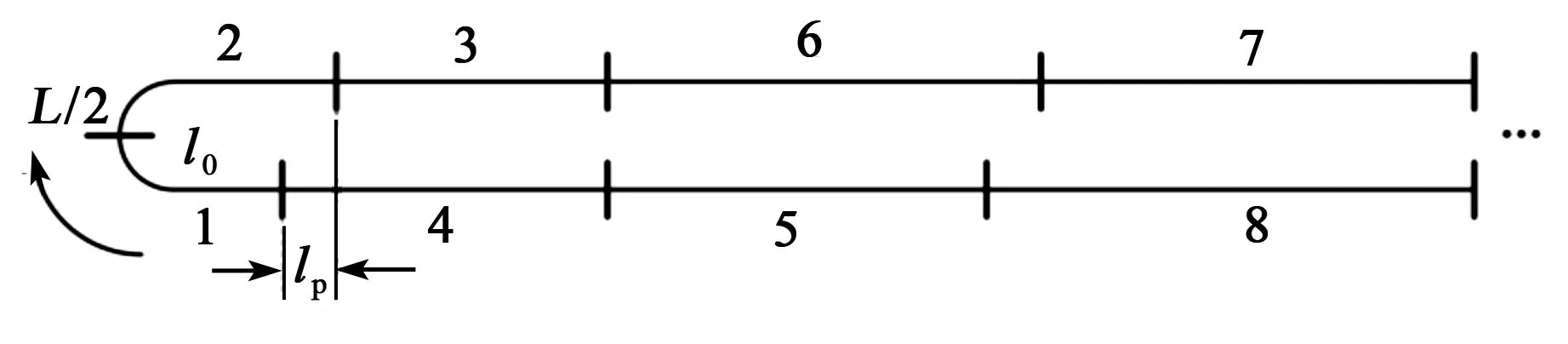
圖4 四極對稱繞法光纖環(huán)層分布示意圖
根據(jù)式(2)可得離散化廣義Shupe誤差為
[lend(q,m)-lstart(q,m)]·
[L-lend(q,m)-lstart(q,m)]
(6)
式中l(wèi)start(q,m),lend(q,m)分別為第q個極子中第m層光纖的起點與終點坐標(biāo)。將常數(shù)項進(jìn)行合并可得:
(7)
根據(jù)式(5)可得溫度時間梯度為時間t的單一變量函數(shù):
(8)
可將式(7)進(jìn)一步寫為
(9)
因此,光纖陀螺啟動過程的溫變效應(yīng)導(dǎo)致的相位誤差為時間t的復(fù)雜函數(shù),幅值由θw決定。在不同啟動溫度環(huán)境下,光纖陀螺內(nèi)部熱源不同的發(fā)熱功率對應(yīng)不同的邊界過余溫度,因此,幅值θw取決于啟動時的環(huán)境溫度T0。在不同啟動溫度環(huán)境下,溫變效應(yīng)誤差具有相同時間變化趨勢,只是具有不同的幅值。因此式(9)可改寫為
Δφe(t)=θw(T0)·f(t)
(10)
式中:θw(T0)為溫變效應(yīng)誤差幅值系數(shù);f(t)為溫變效應(yīng)誤差時間函數(shù)。
基于上述分析,可確定光纖陀螺啟動溫變效應(yīng)誤差的查表法抑制原理:通過實驗獲得不同標(biāo)定啟動環(huán)境溫度Ti下的光纖陀螺啟動溫變效應(yīng)誤差,采用時間表格方法建立式(10)形式的時間函數(shù)F(t,Ti)。在光纖陀螺啟動時,按照啟動環(huán)境溫度T和啟動時間查詢對應(yīng)的時間表格,獲得對應(yīng)溫變效應(yīng)誤差,并在光纖陀螺輸出數(shù)字量中加以補(bǔ)償,從而實現(xiàn)啟動溫變效應(yīng)誤差的抑制。
實際工程應(yīng)用中,T≠Ti,根據(jù)溫變效應(yīng)誤差模型可認(rèn)為在一定溫度范圍內(nèi)θw與環(huán)境溫度成線性關(guān)系,此時可以取相鄰最近的兩個溫度標(biāo)定點Ti和Ti+1下的時間表格F(t,Ti)和F(t,Ti+1),根據(jù)溫度值進(jìn)行等比例插值獲得T下的時間表格為
F(t,Ti)
(11)
1.4 光纖陀螺溫變效應(yīng)誤差評價方法
為對溫變效應(yīng)誤差抑制效果進(jìn)行評估,需要統(tǒng)一的方法對誤差進(jìn)行量化。可參考慣導(dǎo)系統(tǒng)的圓概率誤差(CEP)精度評估方法[20],計算光纖陀螺的漂移概率誤差(DEP)。對光纖陀螺數(shù)據(jù)進(jìn)行角度積分,將積分結(jié)果歸化至1 h,獲得每個采樣時刻ti的漂移率為
(12)
式中θ(ti)為ti時刻的角度積分值。
ΩER服從均值為0,標(biāo)準(zhǔn)差為σ的一維正態(tài)分布,漂移概率誤差ΩDEP(95%)為1.96σ,σ使用漂移率標(biāo)準(zhǔn)差估計值代替。光纖陀螺的漂移概率誤差計算過程中使用角度積分值進(jìn)行計算,避免了白噪聲的影響,可直接量化評估溫變效應(yīng)誤差。
另外,慣導(dǎo)系統(tǒng)的位置精度是反映其性能的重要指標(biāo),而光纖陀螺的漂移誤差會直接導(dǎo)致導(dǎo)航的位置誤差,因此,可直接采用系統(tǒng)位置誤差進(jìn)行誤差評估。將光纖陀螺漂移數(shù)據(jù)代入導(dǎo)航解算過程,導(dǎo)航結(jié)果中僅包含有光纖陀螺漂移所帶來的導(dǎo)航誤差。根據(jù)慣導(dǎo)系統(tǒng)精度評定方法獲得導(dǎo)航圓概率誤差,反映了溫變效應(yīng)誤差對系統(tǒng)誤差的貢獻(xiàn)。
綜上所述,光纖陀螺漂移概率誤差與慣導(dǎo)系統(tǒng)圓概率誤差是溫變效應(yīng)誤差的有效量化評估手段。在后續(xù)的實驗數(shù)據(jù)分析中,采用DEP與系統(tǒng)CEP對溫變效應(yīng)誤差進(jìn)行評估。
2 實驗結(jié)果與分析
實驗中,采用溫箱控制環(huán)境溫度進(jìn)行-40~+60 ℃的環(huán)境溫度控制。溫箱放置在隔振地基上,光纖陀螺靜態(tài)放置于溫箱內(nèi)部。光纖陀螺采用穩(wěn)壓電源進(jìn)行供電,輸出數(shù)據(jù)通過串口發(fā)送至上位機(jī),通過數(shù)據(jù)采集軟件進(jìn)行光纖陀螺輸出數(shù)據(jù)的接收。整體實驗裝置示意圖如圖 5所示。
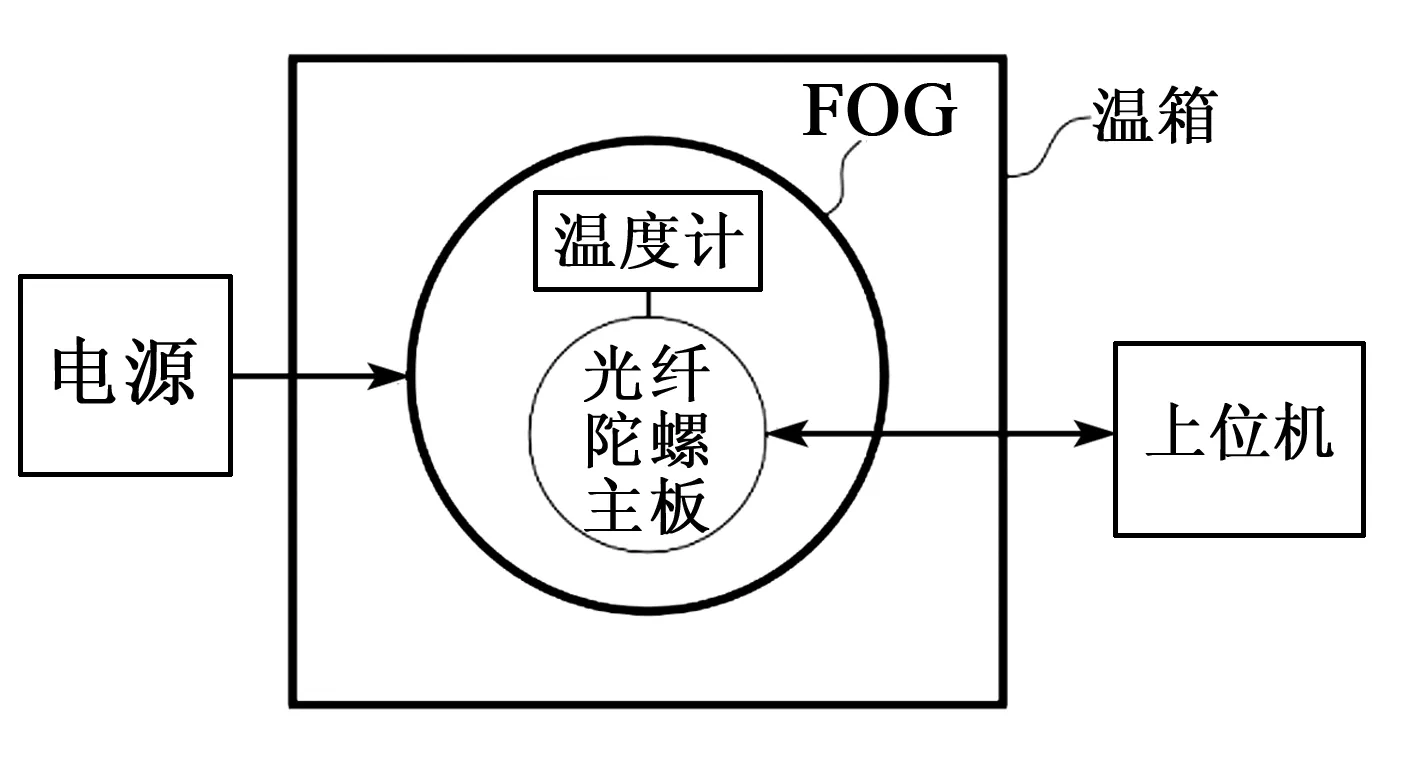
圖5 實驗裝置示意圖
為獲得各個啟動溫度下的光纖陀螺啟動溫變效應(yīng)抑制表格,同時驗證各溫度點下光纖陀螺啟動溫變效應(yīng)誤差查表法抑制效果,進(jìn)行零狀態(tài)重復(fù)啟動實驗。設(shè)置一固定的環(huán)境溫度,對陀螺進(jìn)行斷電4 h、通電2 h的啟動測試,每個溫度測試4組數(shù)據(jù)。在每個溫度點下,對多組啟動數(shù)據(jù)按照時間點進(jìn)行平均后進(jìn)行中心滑動平均,獲得一組噪聲抑制后的光纖陀螺零狀態(tài)啟動趨勢數(shù)據(jù)。根據(jù)第1.1節(jié)中光纖陀螺溫變效應(yīng)理論,當(dāng)光纖陀螺內(nèi)部溫度場達(dá)到穩(wěn)態(tài)時,其溫變效應(yīng)誤差為0,因此,可以認(rèn)為光纖陀螺啟動測試數(shù)據(jù)中末段為不包含溫變效應(yīng)誤差的輸出。將光纖陀螺零狀態(tài)啟動數(shù)據(jù)減去數(shù)據(jù)末段的平均值,即獲得該溫度點下光纖陀螺溫變效應(yīng)誤差抑制表格,流程如圖 6所示。
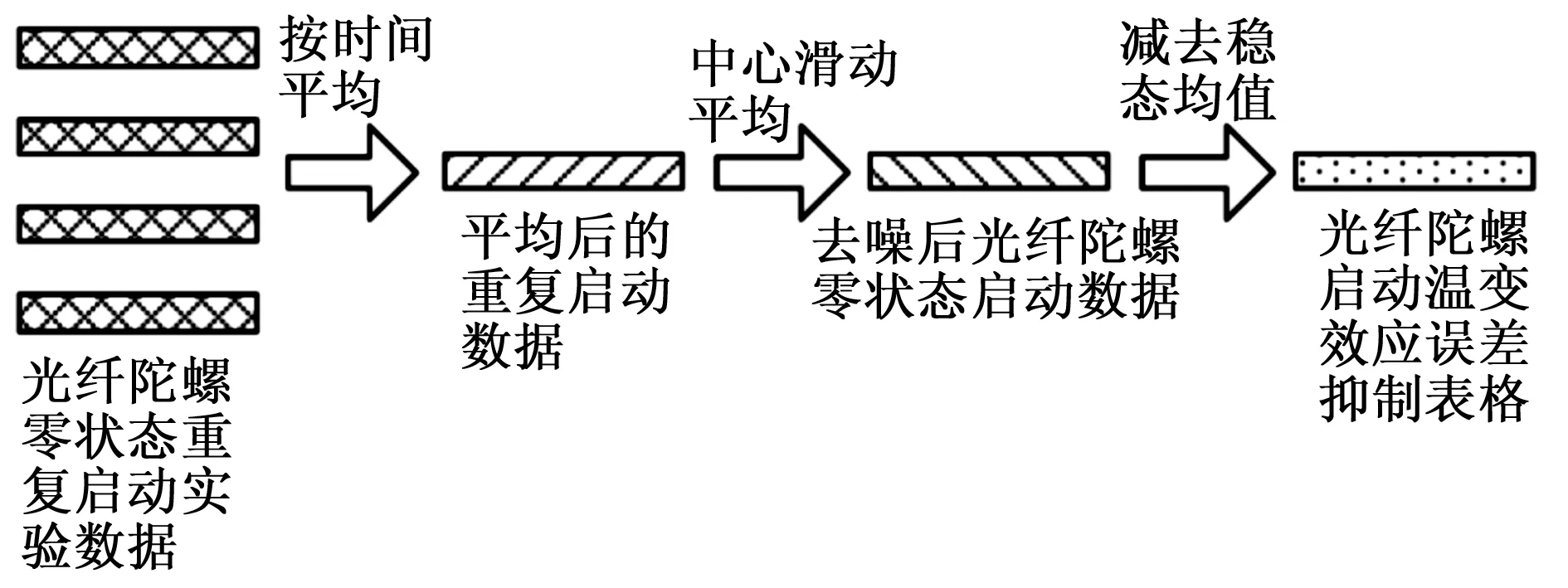
圖6 誤差抑制表格計算流程
根據(jù)誤差抑制表格,對光纖陀螺零狀態(tài)啟動輸出數(shù)據(jù)進(jìn)行實時溫變效應(yīng)誤差抑制。圖 7為20 ℃條件下誤差抑制前、后的光纖陀螺啟動數(shù)據(jù)對比。
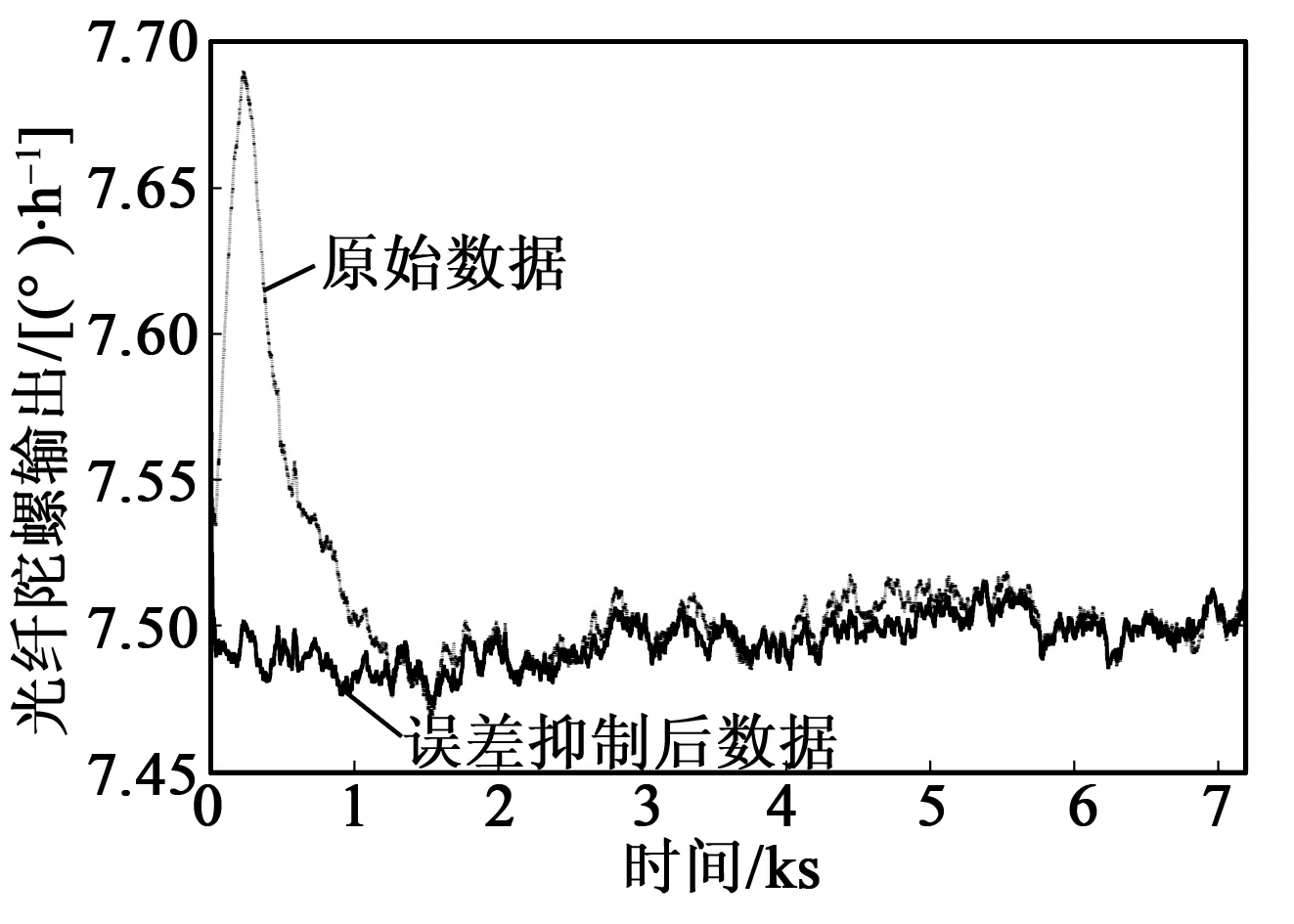
圖7 20 ℃環(huán)境下誤差抑制前、后對比
根據(jù)第1.4節(jié)中的溫變效應(yīng)誤差評價方法計算誤差抑制前、后的DEP和導(dǎo)航CEP,如表 1所示。誤差抑制后DEP由0.10~0.12 (°)/h下降為0.004~0.006 (°)/h,誤差剩余比小于6%。導(dǎo)航CEP從7~9 n mile/h降至0.5 n mile/h以下,誤差剩余比小于7%。同時DEP指標(biāo)與導(dǎo)航CEP指標(biāo)成正相關(guān)。
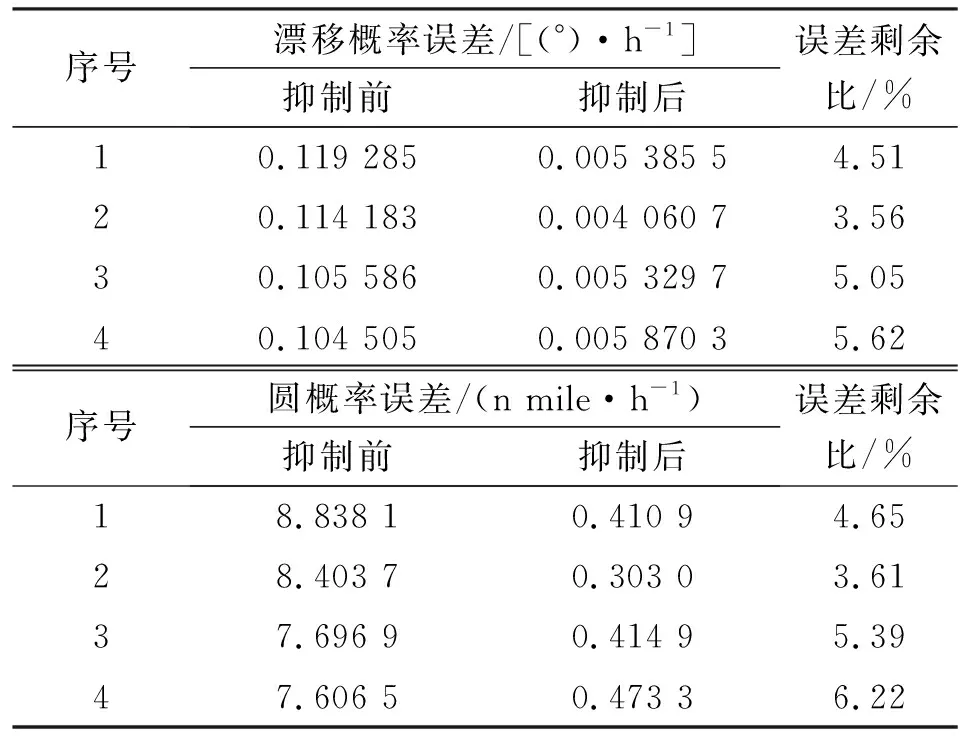
表1 20 ℃條件下誤差抑制前、后的漂移概率誤差與導(dǎo)航圓概率誤差
為驗證光纖陀螺溫變效應(yīng)誤差模型在全溫范圍內(nèi)的適應(yīng)性,進(jìn)行了全溫條件下的光纖陀螺溫變效應(yīng)誤差抑制實驗。以10 ℃為間隔,在-40~60 ℃設(shè)置11個環(huán)境溫度點進(jìn)行光纖陀螺靜態(tài)啟動測試,測試時間為2 h。實驗中,每次溫箱調(diào)整溫度后,對陀螺進(jìn)行大于4 h的冷卻,以保證陀螺內(nèi)部溫度場充分穩(wěn)定。各個環(huán)境溫度點下的測試數(shù)據(jù)表明,光纖陀螺溫變效應(yīng)誤差在不同環(huán)境溫度下的幅值不同,通過各個溫度下的光纖陀螺啟動溫變效應(yīng)誤差抑制表格加以補(bǔ)償后,溫變效應(yīng)誤差下降較大。計算各個溫度點下誤差抑制前、后光纖陀螺的DEP與導(dǎo)航CEP指標(biāo),如圖 8所示。
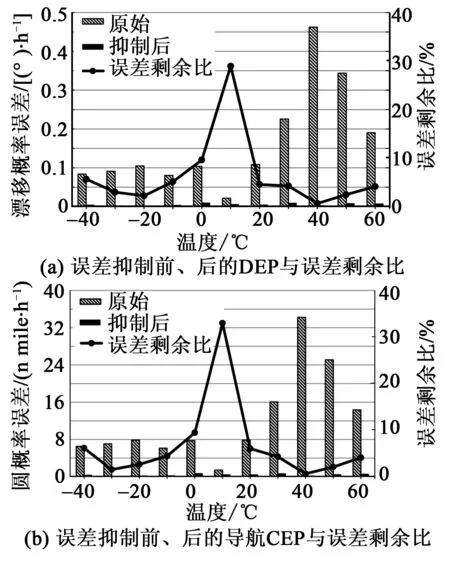
圖8 全溫條件下誤差抑制前、后實驗結(jié)果
由圖8(a)可看出,溫變效應(yīng)誤差模型在不同溫度下的光纖陀螺DEP抑制效果不同,在40 ℃下抑制比最高,DEP誤差剩余比為0.63%,而10 ℃下抑制比最低,DEP誤差剩余比為28.94%。在10 ℃下,光纖陀螺自身的溫變效應(yīng)誤差較小,原始光纖陀螺數(shù)據(jù)DEP為0.021 424 (°)/h,經(jīng)過誤差抑制后為0.006 200 (°)/h,因此,誤差抑制比較小。對比圖 8(b)、(a)可看出,導(dǎo)航CEP指標(biāo)溫度分布與光纖陀螺DEP指標(biāo)相似,且兩者誤差剩余比也具有相同的趨勢。在全溫范圍內(nèi),光纖陀螺DEP從0.02~0.5 (°)/h下降到小于0.01 (°)/h,而對應(yīng)的導(dǎo)航CEP從1.4~35 n mile/h下降到小于0.8 n mile/h。
實驗結(jié)果表明,通過應(yīng)用光纖陀螺溫變效應(yīng)誤差抑制法,常溫條件下光纖陀螺DEP從0.10~0.12 (°)/h降至為0.004~0.006 (°)/h,對應(yīng)導(dǎo)航CEP從7~9 n mile/h降至0.5 n mile/h以下;在全溫度范圍內(nèi),光纖陀螺DEP從0.02~0.5 (°)/h降至0.01 (°)/h以下,導(dǎo)航CEP從1.4~35 n mile/h降至小于0.8 n mile/h。該方法對光纖陀螺的溫變效應(yīng)誤差具有有效的抑制作用,具有良好的一致性與全溫度范圍內(nèi)的適應(yīng)性,可有效降低由于溫變效應(yīng)導(dǎo)致的光纖陀螺漂移誤差,提升對應(yīng)導(dǎo)航系統(tǒng)精度。
3 結(jié)束語
本文根據(jù)光纖陀螺溫變效應(yīng)誤差機(jī)理,結(jié)合光纖環(huán)等效非穩(wěn)態(tài)溫度場分析,獲得了啟動狀態(tài)下溫變效應(yīng)誤差等效數(shù)學(xué)模型。等效數(shù)學(xué)模型中的幅值系數(shù)僅與環(huán)境溫度有關(guān),并對于狀態(tài)固定的光纖陀螺其時間函數(shù)保持不變,根據(jù)這一特點提出了基于查表法的光纖陀螺溫變效應(yīng)誤差抑制方法。同時根據(jù)光纖陀螺的數(shù)據(jù)特征與系統(tǒng)應(yīng)用特點,提出了采用漂移概率誤差和導(dǎo)航圓概率誤差對溫變效應(yīng)誤差進(jìn)行量化評估。開展了全溫條件下溫變效應(yīng)誤差抑制實驗,實驗中獲得了90%以上的誤差抑制效果,全溫環(huán)境下系統(tǒng)導(dǎo)航定位誤差從最大34.221 3 n mile/h降至0.730 4 n mile/h。實驗結(jié)果表明,通過該文誤差抑制方法的應(yīng)用,有效抑制了光纖陀螺溫變效應(yīng)誤差,提升了相應(yīng)的系統(tǒng)性能,具有很強(qiáng)的工程應(yīng)用價值。
此外,當(dāng)考慮更惡劣的應(yīng)用環(huán)境時,外界環(huán)境為變溫條件,根據(jù)溫變效應(yīng)誤差模型,其內(nèi)部的熱傳導(dǎo)過程相當(dāng)于一個時變邊界條件的傳熱過程,若仍采用固定溫度下的誤差抑制表格會導(dǎo)致較大的剩余誤差。此時可通過標(biāo)定獲得的環(huán)境溫度與誤差抑制表格幅值系數(shù)間的關(guān)系,根據(jù)外界環(huán)境溫度實時調(diào)整幅值系數(shù),以逼近變溫條件下的溫變效應(yīng)誤差。變溫條件下的溫變效應(yīng)誤差抑制,需要進(jìn)一步試驗研究,是后續(xù)研究的重點方向。
猜你喜歡
核科學(xué)與工程(2021年4期)2022-01-12 06:30:26
今日農(nóng)業(yè)(2020年19期)2020-12-14 14:16:52
小學(xué)生必讀(中年級版)(2020年9期)2020-12-04 02:07:22
科學(xué)大眾(2020年17期)2020-10-27 02:49:10
紅土地(2018年11期)2018-12-19 05:10:56
意林·全彩Color(2018年9期)2018-11-13 22:49:38
中學(xué)物理·高中(2016年12期)2017-04-22 11:53:03
中國衛(wèi)生(2016年4期)2016-11-12 13:24:14
中國衛(wèi)生(2014年4期)2014-12-06 05:57:14
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30