捷聯式重力無源導航系統
2020-10-28 05:05:28蔡體菁黃俊翔
壓電與聲光 2020年5期
關鍵詞:系統
蔡體菁,黃俊翔
(東南大學 儀器科學與工程學院,江蘇 南京 210096)
0 引言
海洋對經濟發展和國家安全的作用越來越重要,探索和開發海洋已成為我國一個戰略任務。水下自主導航是完成這個戰略任務的重要手段,重力無源導航具有長航時、高精度和隱蔽性好的特點,受世界各海洋大國的高度重視,成為一個重要的研究方向[1-2]。20世紀80年代,美國研制出含有通用重力敏感模塊的無源導航系統[3-4],該無源導航系統水下航行時間長,導航精度高,能延長慣性導航系統的重調周期,但成本較高。為實現低成本的重力無源導航系統,東南大學提出了一種由速率方位慣性平臺、重力傳感器、重力圖、深度計和計程儀組成的重力無源導航系統[5]。近十幾年來,我國慣性技術發展迅猛,激光陀螺旋轉捷聯慣性導航系統定位精度和捷聯式重力儀測量精度得到提高[6-8],且其成本較低。本文提出的捷聯式重力無源導航系統由激光陀螺單軸旋轉捷聯慣性導航系統、計程儀、深度計、光纖陀螺捷聯式重力儀和數字重力異常圖組成。2019年底,捷聯式重力無源導航系統進行了長時間船載試驗后,對該系統的試驗數據進行了離線處理,試驗結果表明,在重力異常變化顯著區域,運載體位置誤差小于1個重力異常圖網格大小。
1 捷聯式重力無源導航系統硬件
本文提出的捷聯式重力無源導航系統的激光陀螺單軸旋轉捷聯慣性導航系統由國防科技大學研制,主要由3個90型二頻機抖激光陀螺儀、3個高精度擺式撓性加速度計和轉位機構等組成。光纖陀螺捷聯式重力儀由北京航天控制儀器研究所研制,主要由3個高精度光纖陀螺儀、3個高精度擺式撓性加速度計及精密溫控裝置等組成。計程儀和深度計是搭載船只固有的。數據采集、組合導航計算機和顯示系統由東南大學研制,數據采集系統實時記錄激光陀螺單軸旋轉捷聯慣性導航系統、計程儀、深度計、光纖陀螺捷聯式重力儀的輸出信息,導航計算機采用現場可編程門陣列(FPGA)+數字信號處理(DSP)+ARM架構,內部存貯數字重力異常圖,執行重力實時數據處理和慣性/重力匹配計算任務。數據采集、組合導航計算機和顯示系統與其他系統和傳感器的連接關系如圖1所示。

圖1 捷聯式重力無源導航系統框圖
2 重力無源導航算法
重力無源導航算法由激光陀螺單軸旋轉捷聯慣性導航系統導航算法、光纖陀螺捷聯式重力測量系統導航和重力異常算法、重力匹配算法3部分組成。
2.1 單軸旋轉捷聯慣性導航系統導航算法
激光陀螺單軸旋轉捷聯慣性導航系統的3個加速度計和3個激光陀螺儀與轉位機構固聯,加速度計和陀螺儀輸出經誤差補償后投影到載體坐標系上,轉位機構坐標系與載體坐標系的旋轉角度由轉位機構的測角轉置給出。根據陀螺儀輸出角速度、導航坐標系旋轉角速度和地球角速度計算出姿態矩陣。補償后的加速度計比力經姿態矩陣變換到導航坐標系上,消除有害加速度,再積分可得到速度和位置。激光陀螺單軸旋轉捷聯慣性導航系統導航算法流程如圖2所示。激光陀螺單軸旋轉慣性導航系統的姿態、速度和位置的計算方法,除轉位機構坐標變換外,與捷聯慣導姿態、速度和位置的計算方法相同。

圖2 激光陀螺單軸旋轉慣性導航系統導航算法流程
2.2 捷聯式重力測量系統導航與重力異常算法
要實時獲得重力異常值需實時知道重力儀的位置、速度和姿態角。光纖陀螺捷聯式重力儀主要由3個相互正交放置的高精度光纖陀螺儀和3個高精度擺式撓性加速度計組成。根據捷聯式重力儀的陀螺儀輸出角速度和加速度計輸出比力經捷聯導航算法計算,就可得捷聯式重力儀的位置、速度和姿態角。把激光陀螺單軸旋轉捷聯慣性導航系統提供的位置信息、計程儀提供的速度信息和深度計提供的水深信息作為重力測量系統的觀測量,應用擴展卡爾曼濾波計算出地理坐標系下的比力值。使用低通濾波器對重力改正后數據進行濾波得到重力異常值。光纖陀螺捷聯式重力測量系統的導航算法與捷聯慣導參考書的計算方法相同。下面只給出光纖陀螺捷聯式重力測量系統的濾波方程。
光纖陀螺捷聯式重力測量系統濾波狀態方程為
(1)
式中:Xk為系統狀態向量;Φk+1/k為狀態轉移矩陣;Γk+1為系統的噪聲轉換矩陣;Wk為噪聲矩陣。
狀態向量為
X=[δvE,δvN,δL,δλ,δh,φE,φN,φU,δGx,
δGy,δGz,δAx,δAy]T
(2)
式中:φE,φN,φU分別為捷聯慣導數學平臺的3個誤差角;δvE,δvN分別為東、北向速度誤差;δL,δλ,δh分別為經度、緯度和高度誤差;δGx,δGy,δGz分別為陀螺儀x、y、z軸的零位漂移;δAx,δAy分別為加速度計x、y軸的零位偏置。W由陀螺儀和加速度計的白噪聲組成:
W=[wgx,wgy,wgz,wax,way]T
(3)
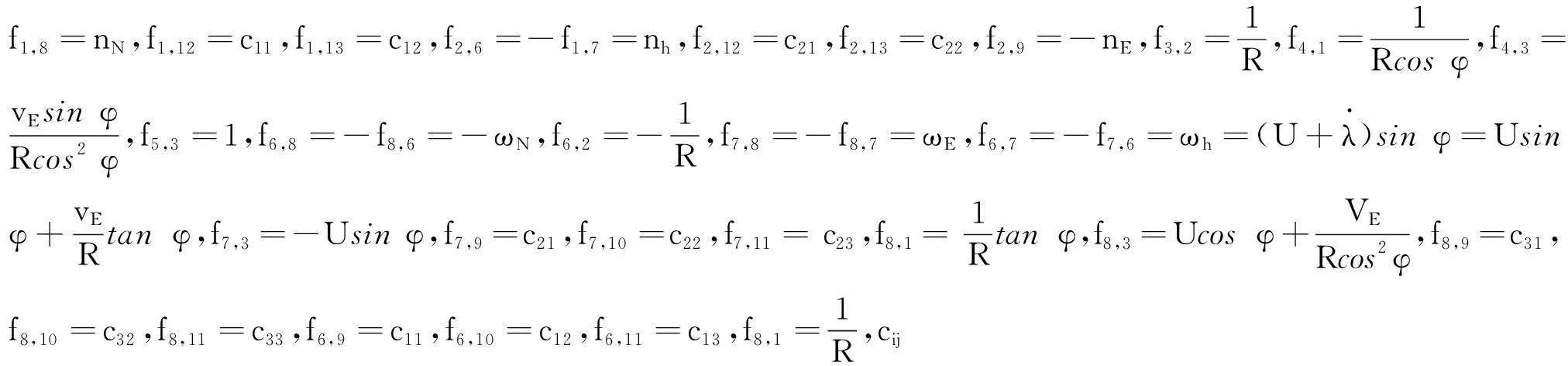
狀態轉移矩陣:
Φk+1/k≈En+Fk·Δt
(4)
光纖陀螺捷聯式重力測量系統的觀測方程為
Zk+1=Hk+1Xk+1+Vk+1
(5)
式中:Zk+1為觀測向量;Hk+1為觀測矩陣;Vk+1為觀測噪聲矩陣。具體如下:
(6)
式中:vE,I,vN,I分別為捷聯慣導計算得到的東、北向速度;vE,DVL,vN,DVL為計程儀輸出的東、北向速度;LI,λI,hI分別為旋轉捷聯慣導計算得到的經度、緯度和深度;LLG,λLG分別為激光陀螺單軸旋轉慣性導航系統給出的經度和緯度;hD為深度計輸出的深度。

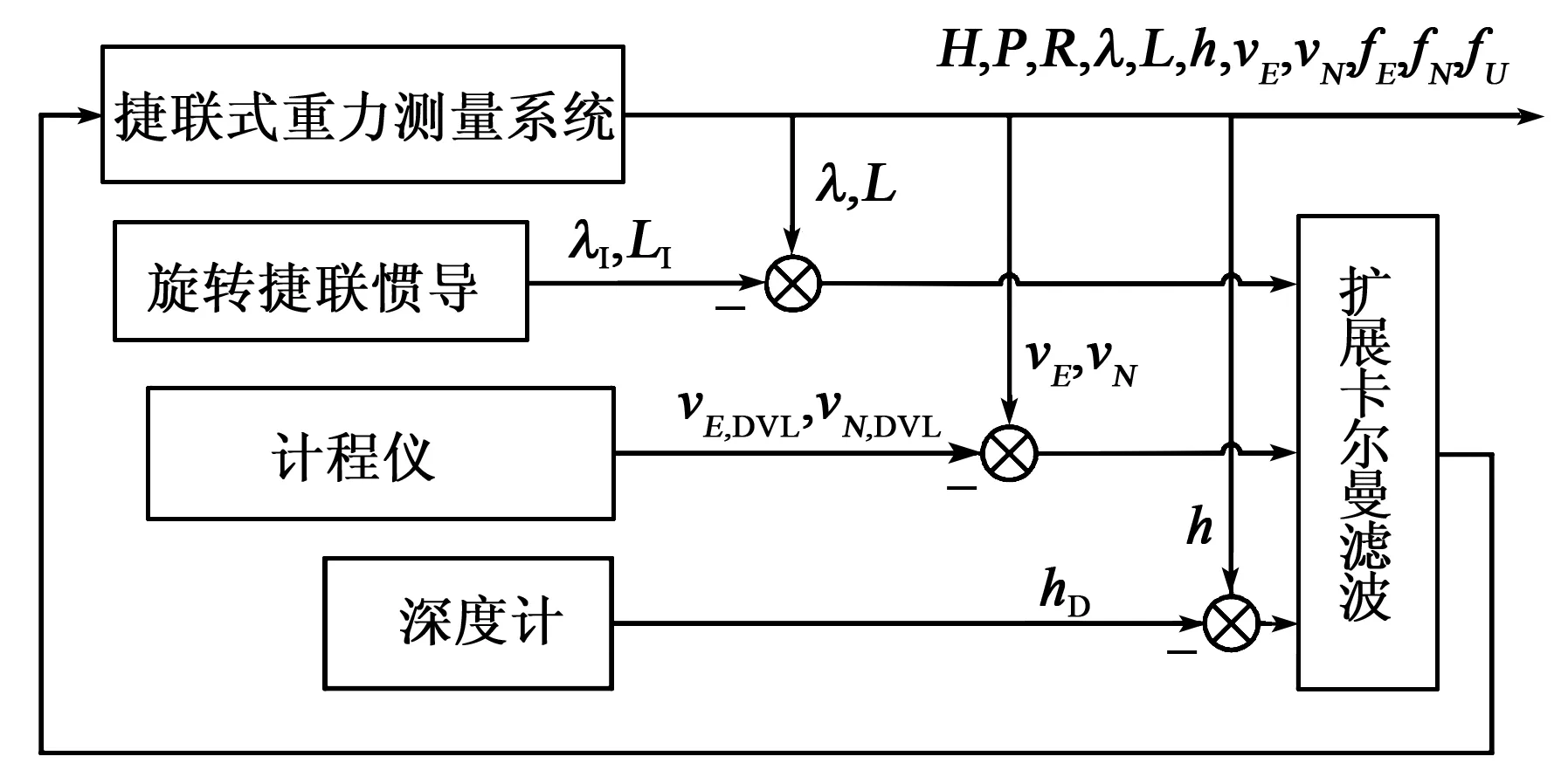
圖3 捷聯式重力測量系統觀測量與卡爾曼濾波反饋示意圖
得到東、北、天坐標系下的加速度計比力fE,fN,fU后,進行重力測量改正,如厄特弗斯改正、正常重力場改正,最后使用低通濾波消除海浪的影響,可實時獲得重力異常值。
2.3 重力匹配算法
根據捷聯式重力測量系統提供的位置信息,在計算機里的數字化重力異常圖上找到對應的重力異常值。把捷聯式重力測量系統得到的實測重力異常值與計算重力異常值做相關分析,得到相關極值點,該點所對應的位置就是匹配后的位置。
Δgt為重力測量系統實測重力異常值,Δgm為數字重力異常圖上的重力異常值,考慮到捷聯式重力測量系統加速度計零位漂移的影響,用相鄰兩點重力異常的變化量與數字重力異常圖上對應兩點的變化量作相關極值計算,即
(Δgm,i-gm,i-1)]2
(7)
式中:j表示第j路徑;N表示點數。運載體最優路徑的計算是使J(j)最小。
3 試驗結果
2019年底,捷聯式重力無源導航系統安裝在某測量船上進行了長時間的海上搭載試驗。數據采集系統記錄下了捷聯式重力無源導航系統的全程試驗數據后,對該系統試驗數據進行了離線處理,按式(1)~(7)計算方法,對某海區進行重力匹配計算。到達重力匹配區時,捷聯式重力無源導航系統已連續工作7天,位置誤差較大。采用上述重力匹配相關極值法,得到了匹配軌跡。圖4為運載體的真實運動軌跡、捷聯式重力無源導航系統指示軌跡和重力匹配軌跡。為了準確評價匹配點的位置誤差,用GPS位置信息作為參考基準。匹配點誤差為匹配點到GPS點的距離,導航系統位置誤差為導航系統指示位置點到GPS點的距離。圖5為匹配點誤差與捷聯式重力無源導航系統指示位置誤差曲線。試驗結果表明,在匹配海域,運載體位置誤差小于1個重力異常圖格網大小。

圖4 真實軌跡、導航軌跡和匹配軌跡圖

圖5 匹配點誤差與導航儀位置誤差曲線
4 結束語
捷聯式重力無源導航系統經離線船載試驗數據驗證,在匹配區域內該系統的位置誤差小于1個重力異常圖格網值。捷聯式重力無源導航系統具有長航時、高精度、成本低的優點,可作為水下自主導航設備,可廣泛應用于海洋探索和開發。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32