基于ADAMS的夾緊機構動態仿真
2020-10-27 08:42:22張相志王彥偉
化工裝備技術 2020年5期
張相志* 王彥偉
(武漢工程大學 機電工程學院)
0 前言
夾緊機構應能保證工件可靠地接觸相應的定位基面,夾緊后不能破壞工件的正確位置,在加工過程中,工件不能因為切削力的作用產生位移和晃動。因此,夾緊機構必須能產生足夠大的夾緊力,具有較高的剛性,還要具有自鎖性能來保證其工作可靠性。在自動夾緊或用自動扳手夾緊的夾緊機構中,通常其中間傳動機構具有自鎖性,確保夾緊動力撤除后工件不至于松開。氣動夾緊機構通常也具有自鎖性。
國內不少研究學者對夾緊機構都進行了研究。王毅亮等[1]采用ST2 軟件建立三維模型導入虛擬樣機仿真軟件ADAMS 對進料夾緊機構進行仿真模擬,從而確定進料夾緊機構中彈簧的扭矩及變形曲線,裴峻峰等[2]應用Workbench 軟件對設計的套管鉗鉗頭夾緊機構的三維模型進行了力學分析,分析了鉗頭組成部分的應力情況,并首次采用先進的壓力膠片測量方法進行了鉗頭夾緊機構的應力測試分析,驗證了設計和仿真分析的正確性。賀凱悅等[3]利用ADAMS 軟件建立了水壓機夾緊機構的三維實體模型,在仿真分析后對夾緊機構進行參數化建模并進行優化設計。席曉燕[4]也基于ADAMS 仿真軟件平臺設計了一種礦用鉸鏈夾緊機構,對鉸鏈夾緊機構進行了建模仿真,并以夾緊力最大為目標函數對系統進行了優化。ADAMS 仿真軟件平臺可用來對不同類型的夾緊機構進行仿真模擬,確定影響夾緊機構工況的最大因素,從而優化夾緊機構裝置。當然,國外也有研究學者通過ADAMS 軟件建立夾緊機構的三維模型,對其進行仿真模擬,并將仿真結果與理論計算結果進行比較,證明仿真模擬的準確性[5]。
傳統的機床夾緊機構大多采用經驗取值法或類比法來設計,限制了機床性能進一步提高。隨著計算機輔助設計技術的發展,虛擬樣機技術已廣泛應用于各個領域。本文通過ADAMS 軟件對簡單的夾緊機構進行了三維建模,并進行了三維仿真模擬,探討了夾緊機構的彈簧在運動過程中的受力情況,結合運動學理論對其受力曲線圖進行了分析。
1 夾緊機構建模
ADAMS 軟件使用交互式圖形環境和零件庫、約束庫、力庫,創建完全參數化的機械系統幾何模型。其求解器采用多剛體系統動力學理論的拉格朗日方程建立系統動力學方程,對虛擬機械系統進行靜力學、運動學和動力學分析,輸出位移、速度、加速度和反作用力曲線。ADAMS 軟件仿真可用于預測機械系統的性能、運動范圍、碰撞檢測、峰值載荷以及計算有限元的輸入載荷等。因此ADAMS 軟件具有強大的參數化建模功能,建模時根據需要確定相關的變量,并將這些關鍵變量設置為可改變的設計變量。對于夾緊機構系統而言,夾桿上作用力是影響彈簧力變化的關鍵因素,但在設計中已將其設為定值。
建模時,首先應該選擇零件庫的點(Point) ,主工具箱中顯示出點(Point)的選項, 選擇“Add to Ground”和“Don't Attach”,在工作窗口中借助工作網格創建6 個點,6 個點的坐標位置如表1 所示。然后根據6 個點的坐標,可以創建點的模型,然后根據每1 個點的位置來創建夾緊機構模型中的零件、約束副、彈性連接、應用力和驅動。
1.1 搖臂和手柄的創建
選擇 ADAMS/View 中零件庫的平板(Plate) ,主工具箱顯示出平板(Plate)的選項。選擇“New Part”,輸入平板的厚度值(Thickness)為 1,輸入平板的圓角半徑(Radius)為 1,用鼠標左鍵選擇設計點 “POINT_1”,“POINT_2”和“POINT_3”,按鼠標右鍵完成搖臂的創建工作,如圖 1 所示。主工具箱顯示出連桿(Link)的選項, 選擇“New Part”,用鼠標左鍵選擇設計點 “POINT_3”和“POINT_4”,完成手柄的創建工作,如圖 2 所示,將其重新命名為“handle”。
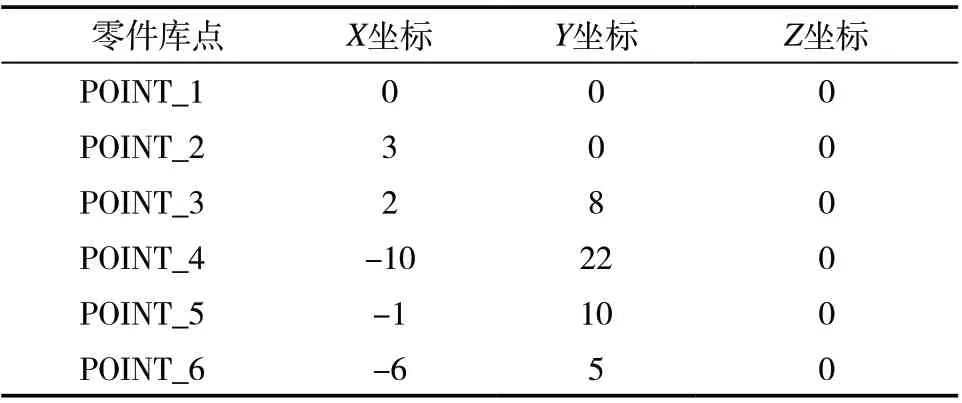
表1 點的坐標
圖1 創建搖桿
圖2 創建手柄
1.2 鎖鉤和固定體的創建
選擇 ADAMS/View 中零件庫的拉伸體(Extrusion),主工具箱顯示出拉伸體(Extrusion)的選項, 選擇“New Part”和“Closed”,將拉伸體的長度(Length)設置為 1,用鼠標左鍵選擇11 個坐標,按鼠標右鍵完成鎖鉤的創建工作,如圖3 所示,將其重新命名為“hook”。選擇 ADAMS/View 中零件庫的長方體(Box) ,主工具箱顯示出長方體(Box)的選項。選擇“On Ground”,使其與大地(Ground)固結在一起,創建固定體,如圖4 所示。
圖3 創建鎖鉤
圖4 創建固定體
2 夾緊機構模型的仿真
首先選擇 ADAMS 零件庫中的“Marker”按鈕,在位置(-18,14,0)處,創建“MAR_5”。選擇 ADAMS/View 力庫中的力(Force)按鈕 ,設置力的方向為與物體固定(Body Fixed);初始方向為選擇特征方向(Pick Feature);力的大小為常量(Constant),數值為 80。選擇ADAMS/View 力庫中的彈簧(Spring)按鈕 ,設置彈簧的剛度(K)為 800,彈簧的阻尼(C)為 0.5。選擇位置(-14,1,0)和(-23,1,0),創建鎖鉤和大地之間的彈簧,如圖5 所示。而在實際結構中并沒有這個彈簧,創建該彈簧的目的是為了獲得實際結構中的夾緊力。
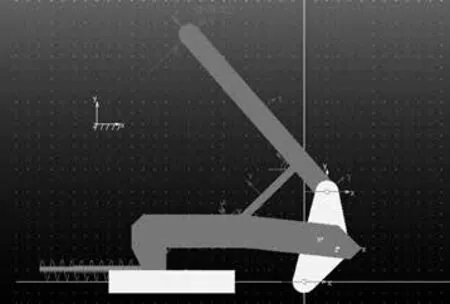
圖5 夾緊機構的模型
在仿真動畫框中設置仿真時間與步數,然后開始進行動態仿真,在這一過程中ADAMS/View 軟件會自動調用開始模擬出夾緊機構中彈簧力的變化曲線,如圖6 所示。
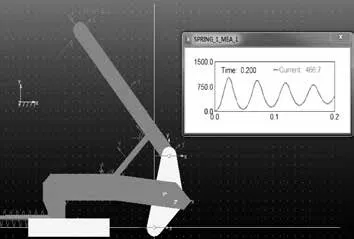
圖6 彈簧力的變化曲線
3 結論
利用ADAMS 軟件創建夾緊機構模型的,并對其進行運動學仿真,生成夾緊機構在運動過程中彈簧力隨時間變化的曲線。由于在夾緊機構中的手柄頂端施加了一個大小恒定的壓力,使手柄帶動連桿,又通過連桿推動鎖鉤,鎖鉤壓縮彈簧,使得彈力快速增加,當壓縮彈簧達到一定壓縮量時,彈簧對鎖鉤的彈力大于連桿對鎖鉤的推力,彈簧要推動鎖鉤向右側移動,彈簧壓縮量隨之減少,因此彈簧上的彈力減小,周而復始,彈簧上的彈力先增大后減小,減小到一定程度又再增大,因此就產生了形如正弦函數的彈力變化曲線。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03