鋼懸鏈線立管清管過程觸底段位移變化規律試驗研究
2020-10-24 02:00:44付云雷朱霄霄
海洋工程 2020年5期
付云雷,朱霄霄,陳 帥,劉 然
(1. 中國石油大學(北京) 機械與儲運工程學院,北京 102249; 2. 中石油北京天然氣管道有限公司,北京 100020 )
在浮式平臺中,輸油立管是海洋石油開發中的關鍵裝備,鋼懸鏈線立管(steel catenary riser,簡稱SCR)是一種用于水下生產系統與水面生產設施連接的輸油立管,具有成本低、無需張力補償等優點,因其較好的適應性而得到廣泛應用[1-2]。常見的簡單懸鏈線立管的形態如圖1所示。鋼懸鏈線立管隨浮體的周期性升沉運動導致立管的觸底區產生較為嚴重的疲勞破壞問題。在對深海立管的維護作業中,清管作業是一項最基本且最為重要的管道維護手段[3]。目前對于懸鏈線立管觸底區的研究主要建立在模型試驗和軟件模擬的基礎上。然而清管過程對立管觸底區的力學響應與位移變化規律影響的研究則較為少見,亟待相關理論的指導和參考。
Bridge等[4-5]在深海環境鋼立管工業聯合開發計劃 (STRIDE JIP) 中進行了全尺度的三維管—土相互作用試驗,根據測試結果,得出了土體吸力、加載速度都會影響流體、立管和土體的相互作用的結論,并提出了土體沉降的機理。Hodder等[6]在水槽中對管—土相互作用進行了試驗研究,模型管采用低剛度大直徑 PVC管,在頂端施加位移,考察觸底區彎矩隨頂端位移的變化規律以及循環加載時管道的整體變形。Clukey等[7]對土體響應及剛度進行了實驗室測量,研究了循環加載下土壤剛度的衰減。王懿等[8]建立了一套簡便易行的管—土相互作用試驗系統,提出了軟黏土條件下新的骨干曲線和吸附力預測模型。Wang等[9]開展了室內大比尺模型試驗,圍繞二維管—土相互作用,研究觸底區的埋置深度對管內應力的影響。白興蘭等[10-11]設計了一套三維管—土相互作用的試驗裝置,能夠為深水鋼懸鏈線立管觸底區管—土相互作用的試驗研究提供參考。李偉等[12]在波流水槽內開展了管—土相互作用試驗,研究了在不同流速阻尼和海床剛度下模型管觸底區的彎矩和加速度等響應。毛海英等[13]運用ABAQUS軟件考慮海床土體豎向非線性、溝槽側向作用力和溝槽回填土的影響,建立了SCR與海床土體的有限元模型,進行了立管整體動力響應分析。常爽等[14]基于動力分析程序CABLE3D通過算例分析了浮體垂蕩運動幅值、海床土剪切強度及梯度對SCR觸底點的動力響應和疲勞損失影響。李凱等[15]基于3種典型管—土作用類型,通過數值模擬研究觸底區管道的豎向運動過程并用試驗結果進行驗證。上述模型試驗均沒有考慮到清管器在清管作業過程中對鋼懸鏈線立管造成的影響,不能為清管作業下鋼懸鏈線立管的力學響應與位移變化規律的研究提供理論支持和參考。
因此設計開發了一種用于鋼懸鏈線立管清管過程分析的試驗裝置,以觸底區的管道為研究對象,通過控制滑臺的運動規律對浮動邊界進行模擬,試驗條件較容易滿足。借助該試驗裝置研究了管道上若干測點的位移運動規律,并結合軟件ABAQUS的仿真結果進行了比較分析。
1 試驗裝置及試驗設計
1.1 試驗裝置
試驗設計開發了一種用于模擬鋼懸鏈線立管在浮動邊界條件下清管行為的簡易測試試驗裝置,如圖2所示。
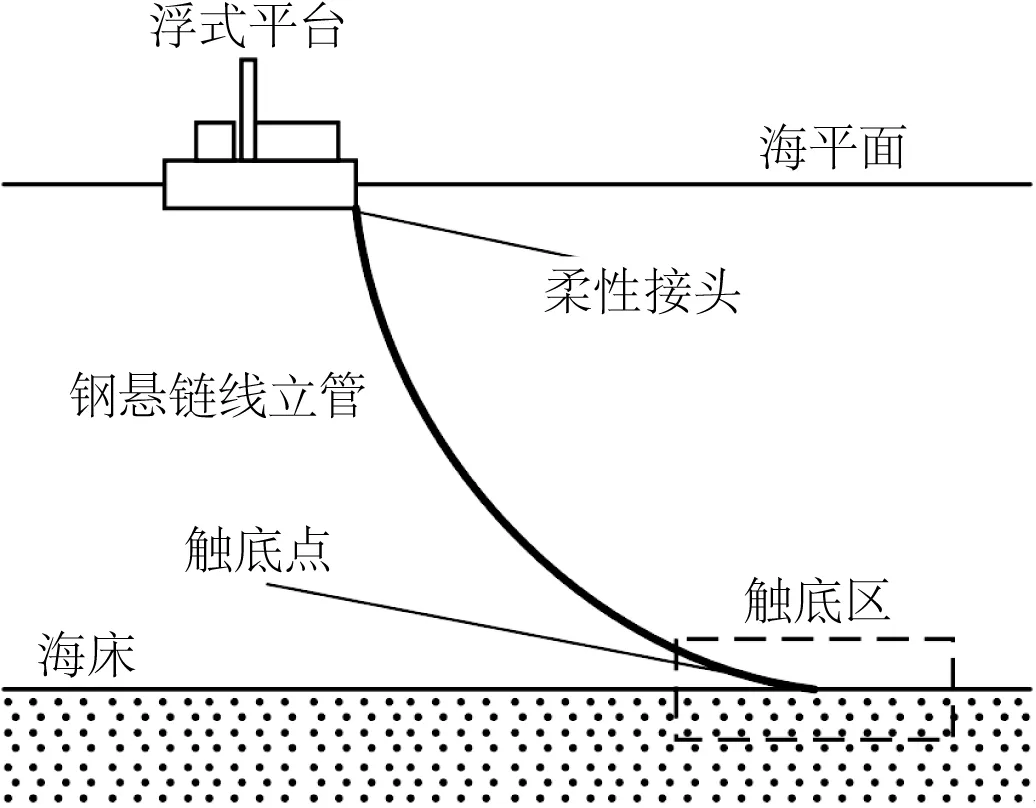
圖1 鋼懸鏈線立管結構示意Fig. 1 Schematic diagram of the steel catenary riser structure
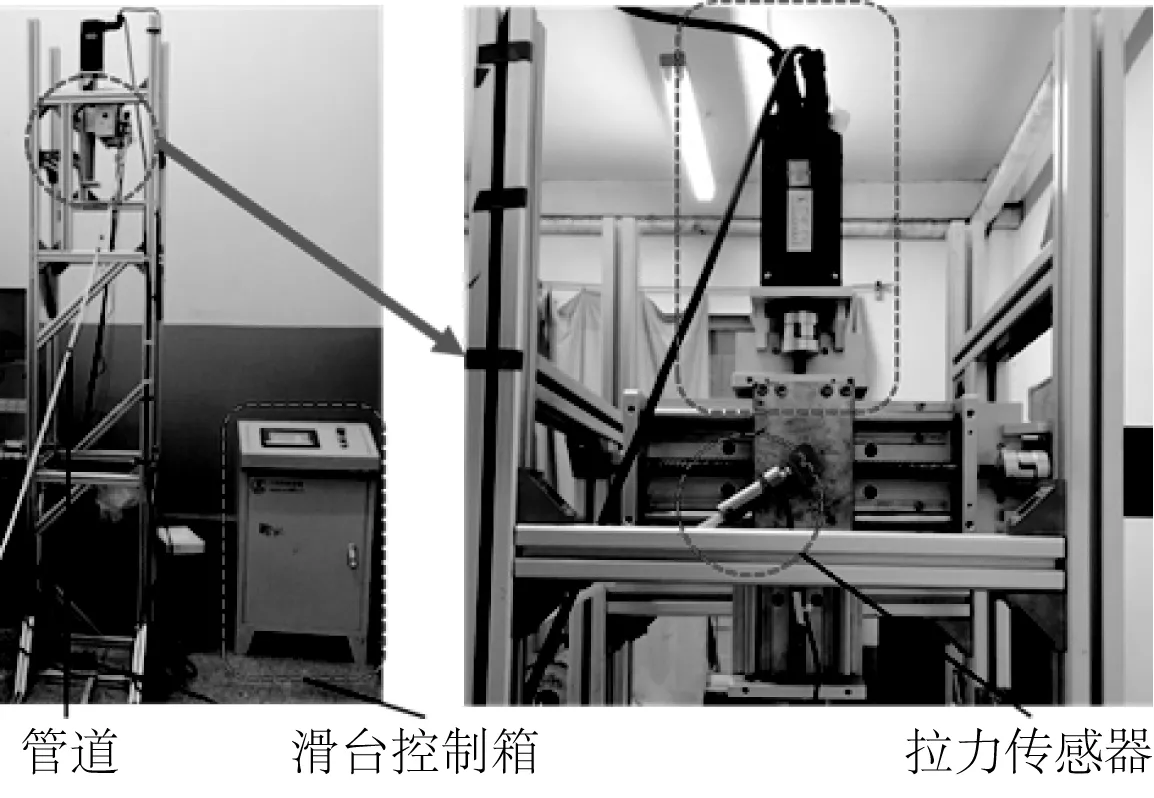
圖2 試驗裝置Fig. 2 Experimental facility
該試驗裝置主要包括4個部分,即二維加載裝置、縮比模型管道、數據采集與控制系統、高速攝像機。借助該試驗裝置可進行無水試驗。
二維加載裝置包括水平和豎直兩個方向上的伺服運動滑臺,如圖2所示。加載系統可以在滑臺控制箱的可視化屏幕中分別設置有關兩個方向的振幅與周期參數,以此用來加載試驗中所需要的立管懸掛端的位移運動規律。模型管道與加載裝置連接方式為鉸接連接。在模型管道的頂部安裝拉力傳感器,用來記錄頂部張力。立管底部與選定好的試驗材料泡棉板相互接觸,模擬立管與海床的接觸作用。試驗中準備的高速攝像機可以通過選擇不同幀數來調整視頻錄制的清晰度,記錄管道上測點的位移變化情況,如圖3所示。

圖3 高速攝像機測量管道位移裝置Fig. 3 Pictures of the measurement of pipe displacement with high-speed camera
1.2 試驗內容設計
以一條長度為1 200 m的鋼懸鏈線立管為研究對象,研究水深為850 m。首先在軟件ABAQUS中建立整個鋼懸鏈線立管模型并進行仿真計算。在此基礎上,試驗選取位于觸底段的980~1 200 m管道為對象,研究其在海洋載荷和浮式平臺的升沉運動下的位移變化規律。參照已有幾何、運動和動力相似原則[16],對試驗管道進行嚴格的縮比計算,得到如表1所示的模型管道的主要物理參數,并且根據縮比計算中楊氏模量計算結果來確定試驗中選擇尼龍管模擬鋼懸鏈線立管,管道外徑8 mm,內徑6 mm,楊氏模量為8.3 GPa,密度為1 600 kg/m3。
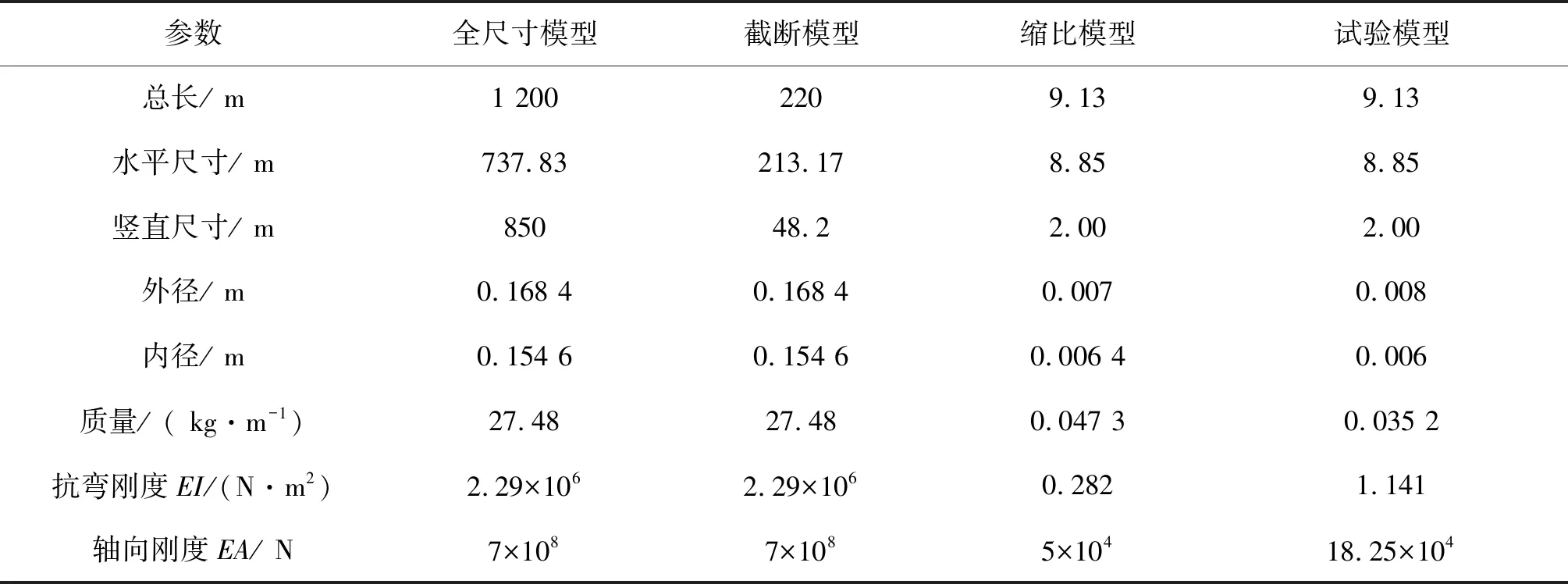
表1 試驗管道物理參數Tab. 1 Experimental physical parameters of SCR
試驗中選擇的縮比尺λ為24.1。由于波浪、洋流和浮式平臺的升沉運動主要影響鋼懸鏈線立管的頂部和中部,對立管的觸底區影響很小,因此開展無水試驗。試驗中所選擇的立管在幾何尺寸、質量、抗彎剛度、軸向剛度上都基本達到縮比模型的要求。對于管道觸底區與管道相接觸的海床的剛度,不需要進行縮比處理,試驗所選泡棉板剛度經測試為200 kPa,與數值模擬中海床剛度一致。由于試驗中模擬清管器的試驗材料選取要受到其自身質量和管道尺寸等因素的限制,同時無法在直徑如此小的管道中控制清管器的運行規律,因此綜合以上考慮,試驗中選擇兩個相同尺寸的空心半圓柱體不銹鋼拼接在一起并黏接在試驗管道外壁上用來模擬清管載荷。此外,立管中的清管器在進行清管作業時,其對立管的影響主要來源于清管器本身的重力載荷以及清管器對管道的沖擊載荷。重力載荷施加方便,而對于沖擊載荷的具體量,目前在相關領域的研究中仍不能用量化公式或理論進行確定,因此試驗中將清管器對管道的沖擊載荷等效的轉化為清管器的附加重力載荷,將原本在管道中運動的清管載荷等效為在管道相應位置處靜止的清管載荷。清管器配重的選型如表2所示。其中試驗模型與原模型之間滿足一定的縮比關系,即λ3。
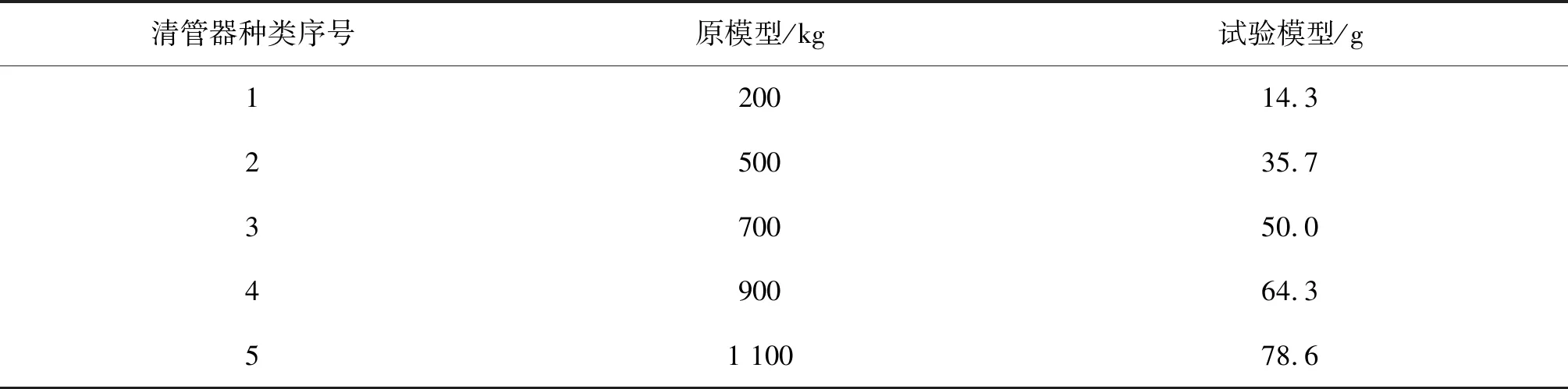
表2 試驗中用到的清管器類型Tab. 2 Type of pigs used in the experiment
1.3 數據采集與處理
二維加載裝置由滑臺控制箱內的可編輯邏輯控制器(PLC)及驅動器進行控制。在控制模塊中,二維加載裝置可以實現獨立控制,既能實現靜態的獨立控制,也能實現雙軸正弦式動態控制。在數據采集模塊中,通過高速攝像機配套的軟件實現視頻的采集與處理,如圖4所示。試驗中管道上的測點位置如圖5所示。在軟件中對高速攝像機拍攝得到的相應測點的位移運動視頻進行處理,進而獲取每個測點的位移隨時間變化的數據。試驗中每組視頻的錄制時間在16 s左右,約為滑臺運動的10個周期。

圖4 高速攝像機視頻軟件界面Fig. 4 High-speed camera video software interface
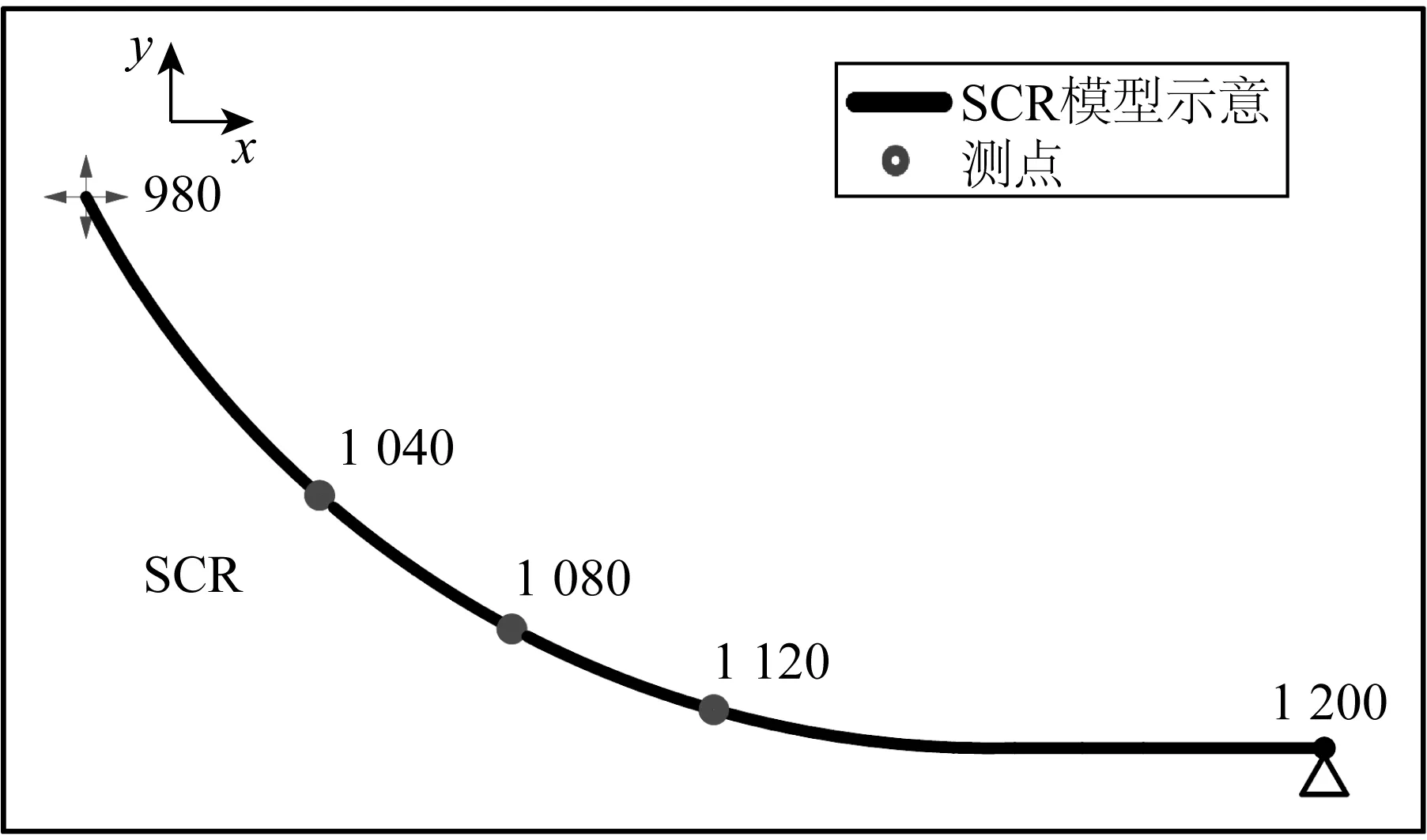
圖5 試驗管道位移測點示意Fig. 5 Schematic diagram of points for displacement measurement
2 試驗數據分析
2.1 試驗裝置可靠性驗證
為了驗證試驗模型的有效性,首先對拉力傳感器采集到的拉力數據和高速攝像機采集到的管道測點的位移數據進行處理,然后將有限元軟件中真實尺寸模型的仿真結果進行縮比后同試驗結果進行比較,拉力數據對比結果如圖6所示,測點1 040的位移數據對比結果如圖7所示。從圖中可以看出,試驗數據與仿真數據在頂部拉力以及管道測點在X與Y兩個方向的位移時程方面都表現出較好的吻合性。由此驗證了模型試驗裝置的有效性和可靠性。
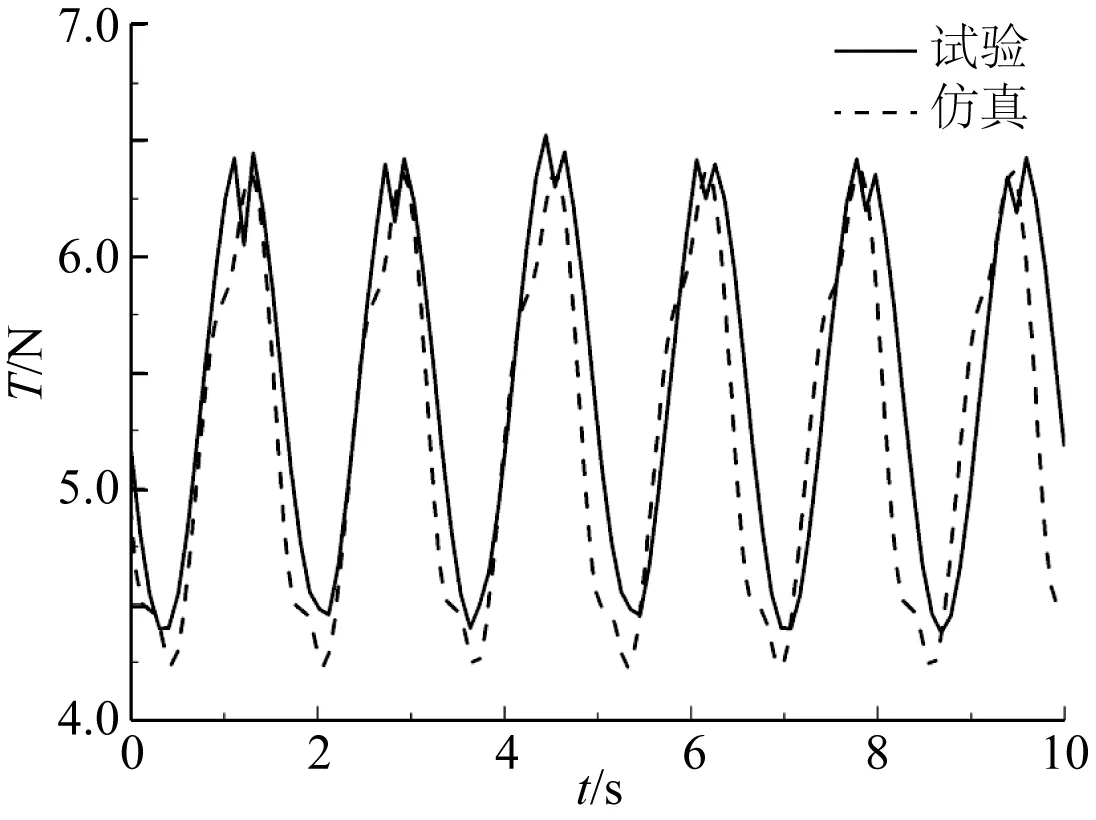
圖6 傳感器拉力測量結果與數值模擬結果比較Fig. 6 Comparison of measurement results with numerical simulation results for tension sensor
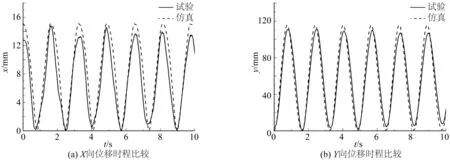
圖7 測點1 040在兩個方向上位移時程的比較Fig. 7 Comparison of displacement time history of the measuring point 1 040 in X and Y directions
2.2 同一測點施加不同清管器載荷時的位移變化規律
在驗證了試驗模型有效性的基礎上,分別從以下方面研究清管載荷對立管觸底段的位移變化的影響規律。
試驗中選取管道上節點序號分別為1 040、1 080和1 120的3個測點,測量這3個測點在施加不同清管載荷的條件下X向與Y向的位移時程曲線,并選取試驗結果中的一個完整周期(以被測點從初始位置運動至極限位置再運動回初始位置為一個周期,時間為1.63 s),分別如圖8、圖9所示。
圖8表示不同清管載荷作用下,3個測點的X向位移在一個周期內的變化規律。從圖中可以看出,隨著清管器質量的增加,3個測點的X向位移均在小范圍內波動,沒有明顯的變化規律。觀察圖9可以發現,對于3個測點來說,Y向位移隨著清管器質量的增加基本上也沒有出現變化。對比圖8和圖9可知,清管載荷的變化對于立管觸底段的X向和Y向位移影響均不明顯。
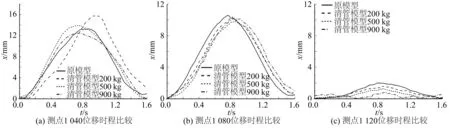
圖8 清管載荷對管道不同測點的X向位移的影響Fig. 8 Influences of pigging load on displacement in X-direction of different measuring points of the riser
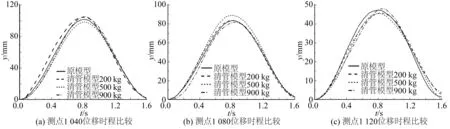
圖9 清管載荷對管道不同測點的Y向位移的影響Fig. 9 Influences of pigging load on displacement in Y-direction of different measuring points of the riser
為了進一步研究清管載荷的大小對立管X向和Y向位移的影響,分別提取不同清管載荷作用下X向位移與Y向位移的極大值并進行線性擬合,結果如圖10所示。由圖10中擬合曲線走勢可知,對于X向位移,測點1 040和測點1 120的位移極大值表現為一種隨著清管器質量的增加而緩慢衰減的趨勢,而測點1 080的位移則基本保持不變;對于Y向位移,僅測點1 040呈現小幅上升趨勢,而測點1 080和測點1 120則基本保持不變。因此可得到如下結論:清管器載荷的變化對立管觸底區3個測點在X向和Y向的位移幾乎沒有影響。
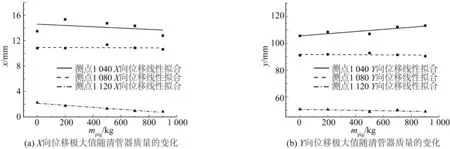
圖10 管道不同測點處位移隨清管器質量的變化Fig. 10 Variation of the displacement at different measuring points of the riser with the mass of pigs
2.3 不同測點施加同一清管器載荷時的位移變化規律
類似的,探究同一種清管器在通過管道不同測點時對該處位移的影響規律。對于管徑為0.168 4 m的管道,適用的清管器質量的范圍為50~100 kg,考慮清管器經過管道時產生的沖擊載荷為清管器質量的2~10倍,選取500 kg清管器載荷進行研究,仍選取試驗結果的一個完整周期進行分析,如圖11所示。

圖11 同一清管載荷對管道不同測點位移變化的影響Fig. 11 Influences of the same pigging load on the displacement of different measuring points of the riser
圖11表示在500 kg的清管器載荷情況下,清管器分別通過管道的3個測點時,3個測點在X向與Y向的位移變化規律。通過比較圖中不同曲線可以發現,隨著立管上測點所在位置所處水深的增加,X向和Y向位移均呈現出逐步減小的趨勢。這說明在清管載荷下隨著立管所處位置的海洋深度的增加,其X向和Y向的位移均會逐漸減小,并且可以觀察到這3個等間距分布測點的位移極大值衰減并不相同,測點越靠后,位移極大值衰減的量越大。這是因為對鋼懸鏈線立管兩端施加了鉸接的邊界條件,在對立管的懸掛端施加水平和豎直方向的正弦規律運動時,由于鋼懸鏈線的特殊幾何形狀,越靠近觸底點,被測點所處位置的曲率越大,立管上間隔等距離的3個測點的位移極大值的差值就會隨著測點靠近觸底點而增大。為了較為直觀地比較不同測點位移的極大值,提取圖11中X向和Y向的位移極大值,如表3所示。

表3 500 kg清管載荷作用下各測點X向和Y向位移極大值Tab. 3 The maximum value of displacement of the measuring points X- and Y-direction under the 500 kg-pigging load
2.4 同一清管器經過測點1 040的前后過程中測點1 040的位移變化規律
為了研究清管器在通過某一段長度的管道過程中某一位置處的位移變化規律,試驗中選擇所研究的管道段為測點1 000~1 080,同時選擇所要研究的測點為1 040。選擇管道上施加清管器的位置依次為測點1 000、1 020、1 030、1 040、1 050、1 060和1 080共七個點并以500 kg清管器載荷為例。記錄清管器在通過每個位置時測點1 040在X向與Y向的位移時程曲線。選取試驗數據中各個周期位移變化的平均值,如圖12所示。
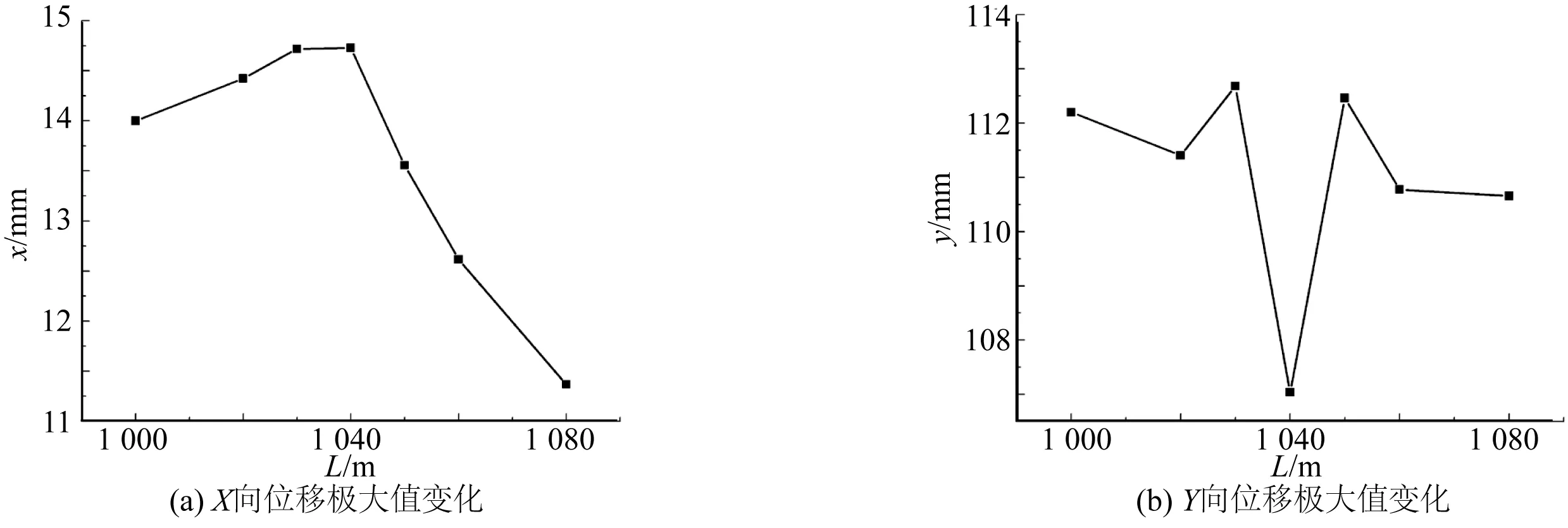
圖12 清管器通過測點1 040的過程中該處位移的變化規律Fig. 12 Variation of the displacement of measuring the point 1 040 during the pigging process
觀察圖12可以發現,在清管器逐漸接近測點1 040到逐漸遠離測點1 040的過程中,其X向位移呈現出先增大后減小的趨勢。其中,在清管器從測點1 000運動至測點1040的過程中,X向位移最多有4.94%的小幅上升,而在清管器從測點1 040運行至測點1 080的過程中,X向位移出現22.8%的顯著衰減。對于Y向位移,在清管器未經過測點1 040時,Y向位移的變化范圍均在1%以內。而當清管器通過測點1 040時,Y向位移相比于其他六點的平均值出現了4.35%的減小情況。在經過了重復性數據驗證后,發現清管載荷在通過測點1 040的過程中,測點1 040處的X、Y向位移表現出的變化規律與圖12表現出的變化規律始終相同,由此可以得出結論:在清管器通過立管某一位置的前后過程中,清管載荷會使得該處的X向位移變化產生先增大后減小的趨勢。而對于該處的Y向位移的影響則表現為僅在清管器通過該處時Y向位移會有明顯的減小。此外,相同情況下清管載荷對立管的X向位移的影響范圍更大。
3 結 語
在鋼懸鏈線立管清管模型試驗中,借助高速攝像機采集立管觸底段上若干測點的位移變化數據并從不同角度挖掘位移變化的規律,得到以下主要結論:
1) 相同條件下,對立管同一位置施加不同的清管載荷,清管器載荷的變化對立管觸底區3個測點在X向和Y向的位移幾乎沒有影響;在對立管不同位置施加同一清管載荷時,隨著立管所處位置的海洋深度的增加,其X向和Y向的位移均會逐漸減小。
2) 在清管器通過立管某一位置的前后過程中,清管載荷會使得該處的X向位移變化產生先增大后減小的趨勢。對于該處的Y向位移的影響則表現為:僅在清管器通過該處時Y向位移會出現減小。此外,相同情況下清管載荷對立管的X向位移的影響范圍更大。
3) 以高速攝像機作為測試手段,有效的觀測到了鋼懸鏈線立管縮比模型在運動過程中的位移,在未來進一步的研究中,如果對被觀測模型使用雙攝像頭組成三維光學觀測系統,則可以獲得更高的觀測精度。同時,由于篇幅限制,對于清管器對立管觸底段的應力影響將在后續的文章中進行細致闡述。
