基于雷達(dá)的道閘控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2020-10-24 07:59:02何桂蘭張春陽趙世麗
科學(xué)咨詢 2020年31期
何桂蘭 張春陽 趙世麗
(重慶電子工程職業(yè)學(xué)院 重慶 401331)
隨著智能識(shí)別技術(shù)的發(fā)展,現(xiàn)有停車道閘系統(tǒng)在生活中的應(yīng)用已經(jīng)非常普遍。各大小區(qū)及停車場均安裝有道閘。該停車道閘系統(tǒng)的工作過程為:當(dāng)有車輛需要通過道閘入場時(shí),與道閘連接的攝像頭會(huì)抓取車輛的圖像,接著利用圖像識(shí)別技術(shù)對(duì)該圖像進(jìn)行識(shí)別,自動(dòng)完成車輛的入場信息登記,即車輛的牌照信息、車輛入場時(shí)間和入場車輛圖像等信息,在完成之后道閘便會(huì)控制欄桿抬起,讓車輛入場[1]。
當(dāng)車輛需要通過道閘出場時(shí),停車道閘系統(tǒng)一般采用地感線圈或雷達(dá)來判斷車輛是否已經(jīng)通過欄桿,以此控制欄桿的下降。不過,地感線圈不能有效檢測車輛外的其他非金屬物體是否經(jīng)過欄桿,缺乏一定的可靠性且安裝時(shí)需要將地感線圈埋于地下,會(huì)破壞路面。因此,本文提出一種采用雷達(dá)檢測來判斷障礙物(如車輛、人員)是否離開進(jìn)而控制道閘下降的控制系統(tǒng)。采用雷達(dá)檢測可以檢測到能夠返回雷達(dá)波的障礙物,相對(duì)地感線圈的檢測方式,檢測范圍廣。與紅外雷達(dá)相比,成本低廉。
一、雷達(dá)技術(shù)概述
雷達(dá),是英文Radar的音譯,源于radio detection and ranging的縮寫,意思為“無線電探測和測距”,即用無線電的方法發(fā)現(xiàn)目標(biāo)并測定它們的空間位置。因此,雷達(dá)也被稱為“無線電定位”。雷達(dá)是利用電磁波探測目標(biāo)的電子設(shè)備。雷達(dá)發(fā)射電磁波對(duì)目標(biāo)進(jìn)行照射并接收其回波,由此獲得目標(biāo)至電磁波發(fā)射點(diǎn)的距離信息[2]。
本文采用44KHZ的雷達(dá),發(fā)射電磁波后開始計(jì)時(shí),直到接收到電磁波返回或超過一定時(shí)長后停止計(jì)時(shí)。通過所記時(shí)長與電磁波速度相乘即可測得障礙物的距離。
二、雷達(dá)道閘系統(tǒng)組成
雷達(dá)道閘系統(tǒng)主要包括六個(gè)部分:電源轉(zhuǎn)換模塊,雷達(dá)檢測模塊,讀寫控制模塊,外部信號(hào)電壓穩(wěn)定模塊,道閘電機(jī)控制模塊,聲音報(bào)警模塊。通過電源轉(zhuǎn)換模塊來為整個(gè)控制系統(tǒng)提供穩(wěn)定的電源,使用雷達(dá)檢測模塊和讀寫控制模塊檢測和存儲(chǔ)讀取距離數(shù)據(jù),外部信號(hào)穩(wěn)壓模塊用來對(duì)外部信號(hào)進(jìn)行濾波處理,使得獲取的狀態(tài)信息穩(wěn)定可靠,通過道閘電機(jī)控制模塊實(shí)現(xiàn)欄桿的下降和防砸控制。
(一)硬件電路設(shè)計(jì)
雷達(dá)道閘系統(tǒng)硬件設(shè)計(jì)主要包括六個(gè)部分:電源轉(zhuǎn)換模塊,雷達(dá)檢測模塊,讀寫控制模塊,外部信號(hào)電壓穩(wěn)定模塊,道閘電機(jī)控制模塊,聲音報(bào)警模塊。

圖1 讀寫控制模塊
讀寫控制模塊是整個(gè)系統(tǒng)的核心,是由PIC16 F721芯片構(gòu)成,擁有高性能的RISC CPU,可達(dá)4K*14字的Flash程序內(nèi)存,以及多達(dá)256字節(jié)的數(shù)據(jù)儲(chǔ)存器(RAM),同時(shí)有較多的IO口提供給系統(tǒng)使用。PIC16 F721芯模塊可對(duì)道閘進(jìn)行障礙物的距離計(jì)算,并對(duì)雷達(dá)檢測模塊、讀寫控制模塊、外部信號(hào)電源穩(wěn)定模塊、道閘電機(jī)控制模塊、信號(hào)報(bào)警模塊起控制作用。

圖2 電源轉(zhuǎn)換模塊
電源轉(zhuǎn)換模塊采用MP2451DT穩(wěn)壓器模塊,MP2451DT是一個(gè)高頻(2MHz)降壓開關(guān)調(diào)節(jié)器與集成內(nèi)部高側(cè)高電壓MOSFET功率。它提供單一的0.6A(或更少)高效輸出與電流模式控制的快速循環(huán)響應(yīng)寬3.3V到36V輸入范圍適應(yīng)各種降壓應(yīng)用輸入環(huán)境。將輸入的12V的電壓轉(zhuǎn)化為5V電路工作電壓。
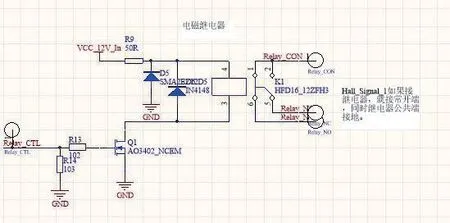
圖3 道閘電機(jī)控制模塊
道閘電機(jī)控制模塊:讀取控制模塊將從雷達(dá)讀取判斷障礙物的信號(hào)轉(zhuǎn)化為高低電平傳輸給電磁繼電器,道閘電機(jī)控制模塊根據(jù)高低電平信號(hào)來控制桿起桿落。
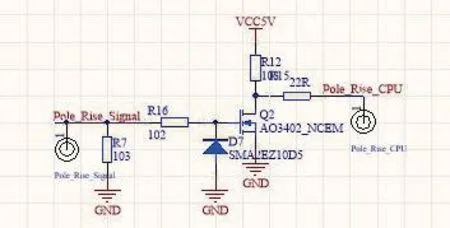
圖4 外部信號(hào)傳入模塊
外部信號(hào)傳入模塊:將外部傳輸?shù)膬蓚€(gè)霍爾信號(hào)和桿上升的信號(hào)傳輸給PIC16 F721讀寫控制芯片,由于外部電壓具有不穩(wěn)定性,該模塊的設(shè)計(jì)就是掉電多余的電壓,使外部信號(hào)的電壓以5V的穩(wěn)定電壓輸入給芯片。
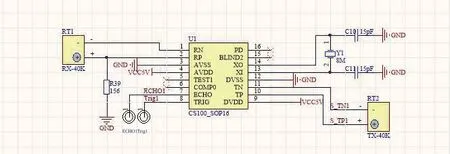
圖5 雷達(dá)檢測模塊
雷達(dá)檢測模塊將雷達(dá)感受到的障礙物信號(hào)反饋到芯片,讀取控制模塊根據(jù)雷達(dá)反饋的信號(hào)計(jì)算障礙物的距離,距離值越大就代表沒有障礙物,值越小就代表有障礙物,讀取控制模塊就根據(jù)距離值判斷有無障礙物,并根據(jù)距離值的大小發(fā)送控制桿起桿落的信號(hào)給道閘控制模塊。
整個(gè)道閘系統(tǒng)的電路設(shè)計(jì)設(shè)計(jì)了兩個(gè)雷達(dá),能更高效更準(zhǔn)確地接受外界的信號(hào)。雷達(dá)檢測模塊的Trigl信號(hào)控制雷達(dá)工作,ECHO1是雷達(dá)傳輸給讀取控制模塊的信號(hào)。
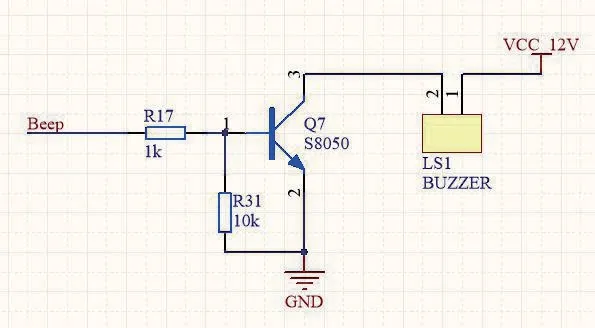
圖6 聲音報(bào)警模塊
聲音警報(bào)模塊設(shè)計(jì)為一個(gè)三極管和蜂鳴器,在道閘工作的時(shí)候發(fā)出蜂鳴提醒。
(二)軟件設(shè)計(jì)
雷達(dá)道閘系統(tǒng)軟件由三部分組成,分別是距離標(biāo)定模塊,時(shí)長標(biāo)定模塊和雷達(dá)道閘控制模塊。
距離標(biāo)定模塊用于標(biāo)定雷達(dá)判斷障礙物是否存在的使用距離。標(biāo)定時(shí),抬起道閘欄桿以免造成干擾,將欄桿誤判斷為障礙物。在雷達(dá)前方N米位置擺放一個(gè)障礙物,開啟雷達(dá)發(fā)送電磁波,同時(shí)打開計(jì)時(shí)器。雷達(dá)接收到返回的電磁波后,關(guān)閉計(jì)時(shí)器。記錄此時(shí)前后的時(shí)長,即可表示為N米的距離。在使用時(shí),若檢測到的距離大于N米,雷達(dá)道閘系統(tǒng)判斷為N米位置內(nèi)不存在障礙物,小于N米時(shí),存在障礙物,返回信號(hào)。此模塊的使用距離可由使用者任意標(biāo)定。
時(shí)長標(biāo)定模塊用于標(biāo)定欄桿抬起到不影響雷達(dá)判斷的起桿時(shí)長和下落到影響雷達(dá)判斷的落桿時(shí)長。由于部分道閘欄桿帶有廣告牌或柵欄等,因此在欄桿抬升的過程中,打開雷達(dá),雷達(dá)的電磁波會(huì)遇到柵欄后返回,使得雷達(dá)誤判斷為障礙物存在。因此,需要在欄桿抬升到不會(huì)影響雷達(dá)電磁波的時(shí)候才開啟雷達(dá)檢測,下降過程同理。
欄桿開始抬升時(shí),打開計(jì)時(shí)器,開啟雷達(dá)檢測,此時(shí)雷達(dá)會(huì)檢測到存在有障礙物。欄桿繼續(xù)抬升至某一位置時(shí),雷達(dá)檢測到障礙物消失。關(guān)閉計(jì)時(shí)器,記錄此過程的時(shí)長,即為起桿時(shí)長。
欄桿開始下降時(shí),打開計(jì)時(shí)器,開啟雷達(dá)檢測,此時(shí)雷達(dá)檢測到不存在障礙物。欄桿繼續(xù)下降至某一位置時(shí),雷達(dá)檢測到障礙物,關(guān)閉計(jì)時(shí)器,記錄此過程時(shí)長,即為落桿時(shí)長。
上述兩個(gè)過程進(jìn)行時(shí)長標(biāo)定時(shí),需在無干擾的情況下進(jìn)行,若在欄桿上升或下降的過程中有車輛經(jīng)過,此時(shí)標(biāo)定時(shí)長無法正常使用。
雷達(dá)道閘控制模塊用于控制欄桿抬起后,檢測到障礙物經(jīng)過并離開后,使得欄桿下降。接收到外部的欄桿抬桿信號(hào)后,經(jīng)過起桿時(shí)長,打開雷達(dá)開始進(jìn)行檢測障礙物是否進(jìn)來,若沒有檢測到障礙物,控制繼電器輸出低電平,返回上一步驟,繼續(xù)檢測障礙物是否進(jìn)來。檢測到障礙物后,控制繼電器輸出高電平,然后檢測障礙物是否離開。若障礙物沒有離開,繼續(xù)控制繼電器輸出高電平,返回上一步驟檢測障礙物是否離開。若障礙物離開,控制繼電器輸出低電平,此時(shí)會(huì)產(chǎn)生一個(gè)由高電平變?yōu)榈碗娖降南陆笛孛}沖信號(hào),會(huì)使得欄桿開始下落[3]。
在下落過程中,繼續(xù)使用雷達(dá)檢測障礙物是否進(jìn)來,若檢測到障礙物,控制繼電器輸出高電平,此時(shí)又會(huì)產(chǎn)生一個(gè)由低到高的上升沿脈沖信號(hào),會(huì)控制欄桿上升,以免繼續(xù)下落出現(xiàn)砸車或砸人現(xiàn)象,起保護(hù)作用,之后再重復(fù)下落過程中檢測障礙物的步驟。若沒有檢測到障礙物進(jìn)來,經(jīng)過落桿時(shí)長后,關(guān)閉雷達(dá),停止檢測。欄桿下降到底后結(jié)束一個(gè)工作周期,等待下一工作周期的開始。

圖7 雷達(dá)道閘工作流程圖
三、結(jié)束語
本文提出的雷達(dá)道閘系統(tǒng)通過獲取道閘欄桿的狀態(tài)信息,并在該狀態(tài)信息發(fā)生變化時(shí)獲取障礙物檢測的雷達(dá)信號(hào),然后利用雷達(dá)信號(hào)檢測道閘欄桿在升降過程中是否存在障礙物,據(jù)此向控制道閘欄桿升降的繼電器發(fā)送控制信號(hào),從而可以在不影響現(xiàn)有停車道閘系統(tǒng)正常功能的情況下,實(shí)現(xiàn)對(duì)道閘欄桿升降控制的升級(jí),具有與現(xiàn)有產(chǎn)品較好的兼容性與低成本性。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
