電動(dòng)汽車(chē)電機(jī)控制系統(tǒng)仿真與實(shí)驗(yàn)平臺(tái)的設(shè)計(jì)與實(shí)現(xiàn)研究
2020-10-21 04:21:06段術(shù)林
汽車(chē)世界·車(chē)輛工程技術(shù)(下) 2020年2期
關(guān)鍵詞:仿真設(shè)計(jì)
段術(shù)林
摘 要:本文圍繞電動(dòng)汽車(chē)電機(jī)控制系統(tǒng)仿真與實(shí)驗(yàn)平臺(tái)的相關(guān)問(wèn)題進(jìn)行分析與探討,分別從硬件結(jié)構(gòu)以及軟件結(jié)構(gòu)兩個(gè)層面對(duì)系統(tǒng)仿真與實(shí)驗(yàn)平臺(tái)的設(shè)計(jì)要點(diǎn)進(jìn)行闡述,然后基于電機(jī)控制仿真模塊、電機(jī)控制實(shí)驗(yàn)?zāi)K、以及電機(jī)對(duì)比分析模塊這三個(gè)部分,對(duì)電動(dòng)汽車(chē)電機(jī)控制系統(tǒng)仿真與實(shí)驗(yàn)平臺(tái)相關(guān)功能的實(shí)現(xiàn)展開(kāi)分析與研究,僅供參考。
關(guān)鍵詞:電動(dòng)汽車(chē);電機(jī)控制系統(tǒng);仿真;設(shè)計(jì)
1 電動(dòng)汽車(chē)電機(jī)控制系統(tǒng)仿真與實(shí)驗(yàn)平臺(tái)設(shè)計(jì)
整套設(shè)計(jì)方案應(yīng)當(dāng)提供一個(gè)具有高度開(kāi)放性的工作環(huán)境,確保速哦構(gòu)建仿真平臺(tái)能夠具備網(wǎng)絡(luò)化、數(shù)值化以及智能化的特點(diǎn)。系統(tǒng)應(yīng)當(dāng)在支持電機(jī)控制仿真功能的同時(shí),具備進(jìn)行電機(jī)控制系統(tǒng)實(shí)驗(yàn)的能力,對(duì)兩者結(jié)果進(jìn)行分析對(duì)比,以支持仿真、控制算法、參數(shù)整定等相關(guān)功能的實(shí)現(xiàn)。在這一總體方案設(shè)計(jì)思路下,以下對(duì)電動(dòng)汽車(chē)電機(jī)控制系統(tǒng)仿真實(shí)驗(yàn)平臺(tái)硬件結(jié)構(gòu)以及軟件結(jié)構(gòu)的設(shè)計(jì)要點(diǎn)進(jìn)行逐一闡述。
1.1 硬件結(jié)構(gòu)設(shè)計(jì)
基于PC單機(jī)的PXI系統(tǒng)涵蓋了數(shù)據(jù)通信與采集功能所需要依賴(lài)的微型計(jì)算機(jī)以及高速卡板支持,通過(guò)驅(qū)動(dòng)控制信息通信功能的方式支持電機(jī)控制功能的實(shí)現(xiàn)。微型計(jì)算機(jī)作為整個(gè)控制系統(tǒng)的核心,能夠?qū)崿F(xiàn)電機(jī)控制系統(tǒng)的仿真與實(shí)驗(yàn)功能,高速采集板能夠?qū)︱?qū)動(dòng)器、電機(jī)以及電池組的電流、電壓、工作溫度等有關(guān)信息進(jìn)行實(shí)時(shí)性采集。尤其需要注意的一點(diǎn)是,對(duì)于交流電動(dòng)機(jī)而言,其具有極強(qiáng)的變性以及耦合性特點(diǎn),控制功能實(shí)現(xiàn)期間對(duì)實(shí)時(shí)性有著非常嚴(yán)格的要求,所選擇芯片應(yīng)當(dāng)具備較高計(jì)算速度,因此在處理器選擇上應(yīng)當(dāng)體現(xiàn)雙CPU的特點(diǎn),通過(guò)DSP與CPLD相結(jié)合的方式,滿(mǎn)足功能實(shí)現(xiàn)。
1.2 軟件結(jié)構(gòu)設(shè)計(jì)
為滿(mǎn)足底層軟件系統(tǒng)應(yīng)用要求,控制器所選用工作框架結(jié)構(gòu)為DSP與CPLD相結(jié)合的結(jié)構(gòu)模式。DSP主要負(fù)責(zé)電機(jī)數(shù)字控制功能的實(shí)現(xiàn),通過(guò)生成PWM格式信號(hào)的方式,對(duì)模擬信號(hào)以及編碼脈沖信號(hào)進(jìn)行采集,以支持上層軟件通信功能的實(shí)現(xiàn)。CPLD則負(fù)責(zé)實(shí)現(xiàn)故障診斷以及數(shù)據(jù)量采集處理保護(hù)功能,可面向外部執(zhí)行機(jī)構(gòu)進(jìn)行可靠控制。在此基礎(chǔ)之上,通過(guò)故障處理與保障的方式,實(shí)現(xiàn)DSP與CPLD的協(xié)同運(yùn)行。
2 電動(dòng)汽車(chē)電機(jī)控制系統(tǒng)仿真與實(shí)驗(yàn)平臺(tái)實(shí)現(xiàn)
2.1 電機(jī)控制仿真模塊
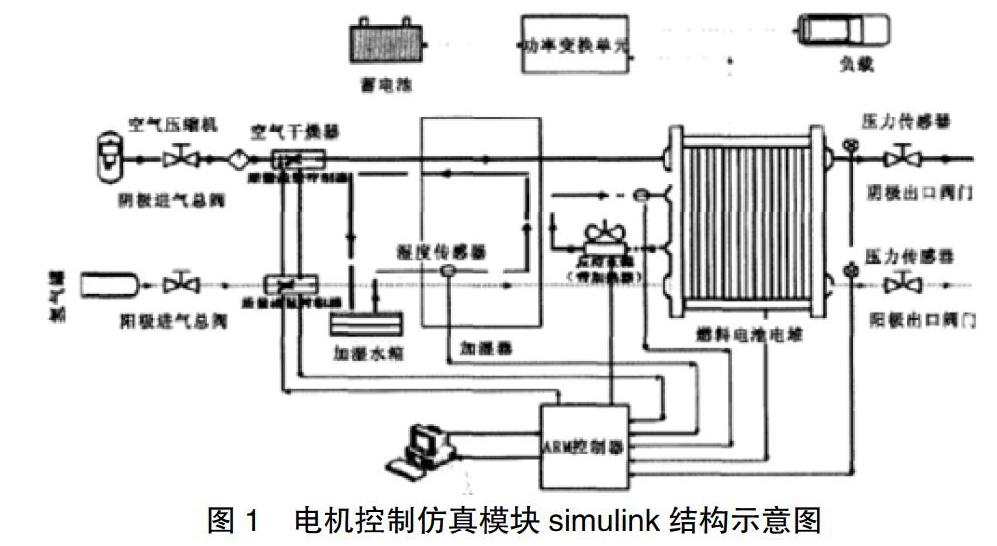
電機(jī)控制仿真模塊的實(shí)現(xiàn)依賴(lài)于混合編程、算法控制以及PI參數(shù)整定這三個(gè)方面的內(nèi)容。將電機(jī)實(shí)際控制算法導(dǎo)入其中,并基于PI整定的方式簡(jiǎn)單化系統(tǒng)參數(shù),以方便混合編程的實(shí)際應(yīng)用。以混合編程為例,simulink模型的調(diào)用應(yīng)搭載SIT工具包實(shí)現(xiàn),使其能夠在LabView環(huán)境中運(yùn)行,基于該環(huán)境構(gòu)建仿真模型并對(duì)相關(guān)變量進(jìn)行輸入,建立基于LabView的控制頁(yè)面,并通過(guò)SIT實(shí)現(xiàn)兩者控制功能的調(diào)用,以滿(mǎn)足調(diào)用同步性的要求,具體結(jié)構(gòu)如圖(見(jiàn)圖1)所示。
2.2 電機(jī)控制實(shí)驗(yàn)?zāi)K
搭載CAN總線實(shí)現(xiàn)數(shù)據(jù)采集以及通信功能,擴(kuò)展格式基于SAEJ1939協(xié)議,協(xié)議長(zhǎng)度為16字節(jié),擴(kuò)展格式為0B,通信協(xié)議中幀頭數(shù)據(jù)格式為D0-D1(2Byte),數(shù)據(jù)區(qū)格式為D2-D13(2Byte),校驗(yàn)碼格式為D14-D15(2Byte)。D0代表功能碼,D1代表數(shù)據(jù)幀編號(hào),可以對(duì)D2-D13數(shù)據(jù)進(jìn)行排序處理,在此基礎(chǔ)之上對(duì)D14-D15數(shù)據(jù)進(jìn)行CRC校驗(yàn),通過(guò)此種方式生成校驗(yàn)碼高位符合地位。在具體應(yīng)用工況中,可以對(duì)電動(dòng)汽車(chē)實(shí)際工作狀態(tài)進(jìn)行定義,電機(jī)控制數(shù)據(jù)基于16進(jìn)制編碼進(jìn)行表示,通過(guò)校驗(yàn)該數(shù)據(jù)的方式Y(jié)u對(duì)故障進(jìn)行可靠屏蔽。除此以外,電機(jī)參數(shù)被驅(qū)動(dòng)控制系統(tǒng)所收集,并搭載IO接口以及報(bào)警協(xié)議傳輸至上下層協(xié)議模塊中,轉(zhuǎn)換為表格或波形格式提供給操作用戶(hù)。
2.3 電機(jī)對(duì)比分析模塊
電機(jī)分析對(duì)比模塊涉及到子單元包括導(dǎo)入模塊、數(shù)據(jù)分析模塊以及對(duì)比模塊這三個(gè)部分。在模塊功能實(shí)現(xiàn)的過(guò)程當(dāng)中,經(jīng)自動(dòng)制動(dòng)導(dǎo)入數(shù)據(jù),支持基于數(shù)據(jù)庫(kù)對(duì)模擬以及實(shí)驗(yàn)數(shù)據(jù)的直接上傳,通過(guò)檢測(cè)數(shù)據(jù)的方式激活導(dǎo)入模塊,并利用數(shù)據(jù)分析模塊支持對(duì)性能指標(biāo)參數(shù)的選擇性分析,通過(guò)計(jì)算穩(wěn)態(tài)誤差、上升時(shí)間等參數(shù)的方式,生成相關(guān)函數(shù)并支持超量計(jì)算,合理分析計(jì)算結(jié)果,以支持對(duì)數(shù)據(jù)的選擇,生成相應(yīng)數(shù)據(jù)模型。
3 結(jié)束語(yǔ)
圍繞電動(dòng)汽車(chē)電機(jī)控制系統(tǒng)仿真與實(shí)驗(yàn)平臺(tái)的設(shè)計(jì)、實(shí)現(xiàn)問(wèn)題展開(kāi)研究,對(duì)于未來(lái)期間電動(dòng)汽車(chē)的發(fā)展有著非常重要的意義。通過(guò)可靠硬件與軟件結(jié)構(gòu)設(shè)計(jì)的方式,能夠確保整個(gè)仿真與實(shí)驗(yàn)平臺(tái)具備良好的可操作性與適用性,并通過(guò)電機(jī)控制仿真模塊、電機(jī)控制實(shí)驗(yàn)?zāi)K以及電機(jī)對(duì)比分析模塊的全面整合,保障了系統(tǒng)功能的可靠實(shí)現(xiàn)。
參考文獻(xiàn):
[1]許力,曹青松,易星.基于Z源逆變器的電動(dòng)汽車(chē)永磁同步電機(jī)驅(qū)動(dòng)控制策略[J].微電機(jī),2019,52(11):56-60.
[2]王聰慧,張臻,單棟梁等.電動(dòng)汽車(chē)直流充電機(jī)軟啟動(dòng)控制策略的研究[J].電源技術(shù),2019,43(08):1395-1396,1402.
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技資訊(2016年18期)2016-11-15 20:09:22
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 23:25:33
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
 汽車(chē)世界·車(chē)輛工程技術(shù)(下)2020年2期
汽車(chē)世界·車(chē)輛工程技術(shù)(下)2020年2期
- 汽車(chē)世界·車(chē)輛工程技術(shù)(下)的其它文章
- 協(xié)同產(chǎn)品開(kāi)發(fā)環(huán)境下項(xiàng)目管理系統(tǒng)的研究
- 淺議機(jī)械產(chǎn)品三維設(shè)計(jì)檢測(cè)與質(zhì)量管理
- 高校服務(wù)經(jīng)濟(jì)發(fā)展校企合作共筑河科夢(mèng)想
- 中職汽車(chē)應(yīng)用于維修教學(xué)中的合作學(xué)習(xí)初探
- 課程思政引領(lǐng)下高職汽車(chē)專(zhuān)業(yè)課“德技雙修”教學(xué)模式的構(gòu)建
- 淺談冶金企業(yè)檢驗(yàn)過(guò)程的質(zhì)量控制方法