全承載公交客車操穩性及平順性仿真分析
2020-10-20 07:18:51朱愛榮
汽車實用技術 2020年15期
朱愛榮


摘 要:文章針對全承載公交客車,基于Adams軟件,建立客車模型,對穩態回轉、蛇形分析、轉正回正三個工況進行操作穩定性仿真分析;建立隨機不平路面模型,通過計算駕駛員處三向加速度均方根值,進行客車平順性仿真分析。
關鍵詞:全承載公交客車;操作穩定性;平順性;仿真分析
中圖分類號:U467? 文獻標識碼:A? 文章編號:1671-7988(2020)15-158-03
Abstract: In this paper, a bus model is established based on Adams software for the simulation analysis of the handling stability under three conditions, namely steady-state turning, S-shaped turning analysis, and straightening and returnability. Meanwhile, a model of random uneven road surface is established for the simulation analysis of ride comfort by calculating the root mean square value of three-direction acceleration at the driver's position.
Keywords: Monocoque-based City Bus; Handling Stability; Ride comfort; Simulation analysis
CLC NO.: U467? Document Code: A? Article ID: 1671-7988(2020)15-158-03
前言
車輛操作穩定性和平順性是評價整車性能指標中的兩個重要指標,其中,操作穩定性是影響車輛主動安全的重要因素[1],平順性則直接表現為車輛行駛過程中乘客的乘坐舒適性[2]。公交客車作為主要載運乘客的汽車,乘員人數相對較多,對整車的操作穩定性和平順性要求則更加突出。因此,在新產品的整車設計研發階段,為縮短研發周期、提高設計水平、減少研發精力和財力投入,有需要也非常有必要利用CAE仿真分析技術,對設計方案進行理論驗證。
1 客車多體模型的建立
Adams\car軟件建立模型的基本步驟為:建立硬點,建立各部件總成,建立部件總成間的約束,建立通訊器。客車結構復雜,整車建模時需進行適當的簡化[3]。各子系統模型建立完成后,根據實車的裝配關系進行整合,即為整車的多體模型[4]。
1.1 懸架模型的建立
硬點是建立仿真模型的基礎,懸架上所有的部件及其相關約束等均以硬點為基礎建立。根據硬點建立各懸架模型,轉向軸懸架為非獨立剛性軸結構,模型如圖1所示,驅動軸懸架為整體式剛性軸結構,模型如圖2所示。
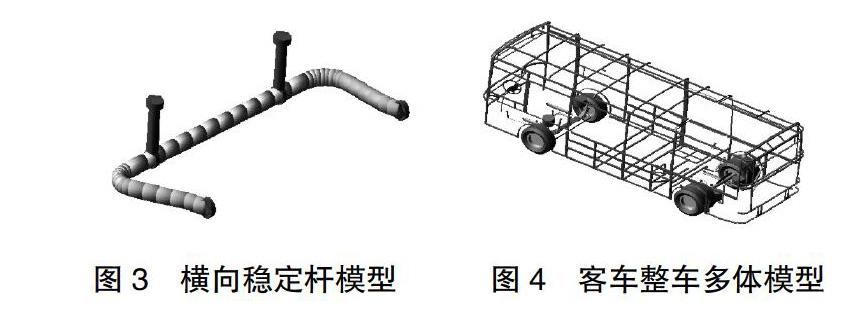
1.2 橫向穩定桿模型的建立
橫向穩定桿,是安裝在轉向軸懸架中的輔助彈性元件[5],U型金屬鋼管結構,通過彈性橡膠軸承分別與車身和懸架進行連接,模型如圖3所示。
1.3 客車整車多體模型的建立
轉向軸懸架、驅動軸懸架及橫向穩定桿等零部件模型建立后,將各零部件模型與全承載車身模型進行裝配,建立客車整車多體模型,如圖4所示。
2 客車操縱穩定性仿真分析
整車仿真分析基本流程為:打開整車總成,設定仿真參數,執行仿真分析和圖像及數據處理。
2.1 客車穩態回轉仿真分析
穩態回轉仿真分析是通過 “定轉向變車速”的模擬試驗,對客車的操作穩定性進行仿真分析的一種方法。在整個分析過程中,方向盤轉角始終保持不變,車速逐步增加,直至達到客車的側向加速度或車速的設計目標值[6]。評價指標有中性轉向點的側向加速度值、不足轉向度以及車身側傾角梯度。
以固定方向盤轉角/線性變車速輸入的穩態回轉仿真試驗,采用文件驅動(file-driven analysis)的形式完成。
仿真測試結束后,系統讀取客車如下參數:行駛速度、車身側傾角度、側向加速度、橫擺角速度以及車輛行駛軌跡,并按照GB/T 6323-2014中規定的數據處理方法,計算得到客車的轉彎半徑、轉向/驅動軸偏角差、不足轉向度以及車身側傾角梯度等數值[7]。
根據QC/480-1999標準的評價方法,對客車中性轉向點的側向加速度值、不足轉向度以及車身側傾角梯度三項指標進行評價計分[8],穩態回轉仿真測試評分結果如表1所示。
2.2 客車蛇行仿真分析
蛇行仿真分析是通過客車沿著特定的軌跡運行,獲取瞬態響應的模擬試驗,不僅可以測試車輛急劇轉向能力,而且還可以測試急劇轉向時的安全性和舒適性[9],評分指標有平均橫擺角速度峰值和平均方向盤轉角峰值。
蛇行仿真分析采用了文件驅動(file-driven analysis)的形式完成。
仿真測試結束后,系統讀取客車如下參數:方向盤轉角、車身側傾角、橫擺角速度以及側向加速度,并按照GB/T 6323- 2014中規定的數據處理方法,計算得到平均方向盤轉角峰值和平均橫擺角速度峰值。
根據QC/480-1999標準的評價方法,對客車平均方向盤轉角峰值和平均橫擺角速度峰值指標進行評價計分,蛇形仿真測試評分結果如表2所示。
2.3 轉向回正仿真分析
轉向回正仿真分析是考察車輛由彎道進入直道的響應,為常見的工況之一,分為兩個操作步驟:第一步,使車輛保持預設的側向加速度運行;第二步,開始時放開方向盤轉角,并記錄車輛的響應。評分指標有殘留橫擺角速度和橫擺角速度總方差。
轉向回正仿真分析采用文件驅動(file-driven analysis)的形式完成。
仿真測試結束后,系統讀取客車如下參數:行駛速度、車身側傾角度、方向盤轉角、側向加速度以及橫擺角速度等數值。并按照GB/T 6323-2014中規定的數據處理方法,計算得到殘留橫擺角速度和橫擺角速度總方差數值。
根據QC/480-1999標準的評價方法,對客車平殘留橫擺角速度和橫擺角速度總方差指標進行評價計分,轉向回正仿真測試評分結果如表3所示。
2.4 客車操縱穩定性分析仿真小結
通過以上標準工況仿真分析,客車操作穩定性各個指標評分均滿足要求。
3 整車平順性仿真分析
3.1 隨機不平路面生成
客車的平順性仿真分析所用隨機不平路面模型采用諧波疊加法構建,該方法理論基礎嚴密,使用范圍普遍,是路面不平度精度較高的一種頻域模型轉換方法[10]。
Adams軟件構建的隨機不平的路面是一個三維表面,三維表面由一系列呈三角形平面單元組成,三角形平面由各節點(Node)組成,隨機不平路面原理如圖5所示,圖中各節點由數字1、2、3、4等表示,每個節點均x、y、z三向坐標,其中x和y兩向坐標要滿足特定的規律,z向坐標則單純表示路面寬度;每個節點按特定規律組成路面單元(Element);然后對路面單元進行靜、動摩擦系數設置,即可得到真實路面模型。
3.2 隨機路面輸入仿真分析
考慮到公交客車一般行駛為城市道路,因此應該進行B級路面的平順性能測試。
分析采用Adams/Car自帶的分析工況進行。
分析結束后,提取駕駛員處三向加速度,計算均方根值[11],如表4所示。
3.3 整車平順性分析仿真小結
經過計算,獲得駕駛員處在不同車速下的三向加速度均方根值,通過與企標中基準車型數據進行對比分析,此款全承載公交客車的平順性指標符合設計標準的要求,可以達到預期的性能水平。
4 結束語
本文針對某款全承載公交客車,利用Adams軟件,建立各部件及整車模型,通過整車操作穩定性各工況以及平順性的仿真分析評價,對此款公交客車的產品設計進行了理論驗證,為整車的材料選擇及結構設計提供了有效的理論技術支持。
參考文獻
[1] 尹念東.汽車操縱穩定性的研究進展[J].黃石高等專科學校學報,2004,20(4):1-4.
[2] 王想亭,張瑞乾,趙峻.基于ADAMS的汽車平順性的仿真分析[J]. 汽車實用技術,2013,(12):8-14.
[3] 孫利平,李輝,金獅.空氣懸架大客車整車仿真建模:河南省汽車工程學會第八屆科研學術研討會論文集[C].河南:河南省汽車工程學會,2011.
[4] 錢德猛,陳玲琳.基于虛擬技術的空氣懸架汽車的建模及仿真[J].客車技術與研究,2006,(1):7-9.
[5] 孟杰,張凱.橫向穩定桿對汽車穩態響應性能影響的仿真分析[J].常熟理工學院學報(自然科學),2012, 26(8):70-71.
[6] 侯煒,楊亞娟,劉紅領,張德超.車輛定半徑穩態回轉仿真實驗方法研究:第三屆中國CAE工程分析技術年會論文集[C].北京:中國力學學會,2007.
[7] 全國汽車標準化技術委員會.汽車操縱穩定性試驗方法:GB/ T6323-2014[S].北京:中國標準出版社,2014:28-31.
[8] 全國汽車標準化技術委員會.汽車操縱穩定性指標限值與評價方法:QC/T480-1999[S].北京:中國標準出版社,1999:1-2.
[9] 喬邦,張才權,李靜紅.汽車操縱穩定性道路試驗研究[J].新余學院學報,2013, 18(6):79-81.
[10] 聶彥鑫,李孟良,過學迅,楊波.基于諧波疊加法的路面不平度重構[J].汽車科技,2009,(4):55-58.
[11] 穆國寶,何凱欣,李家柱.汽車行駛平順性評價方法研究及仿真分析[J].汽車科技,2012,(1):8-11.
