基于PLC主控制器的多工位自動化上卸料機械臂系統(tǒng)設(shè)計研究
2020-10-20 05:35:55何克祥
粘接 2020年9期
摘要:文章研究了基于PLC主控制器的多工位自動化上卸料機械臂系統(tǒng)設(shè)計,對系統(tǒng)的整體結(jié)構(gòu)和工作流程進行分析,然后分析了機械臂結(jié)構(gòu)與控制要求,最后對機械臂控制系統(tǒng)和程序進行設(shè)計。多工位自動化上卸料機械臂系統(tǒng)具有高效性、安全性、穩(wěn)定性、智能化等特點,在工業(yè)生產(chǎn)加工中進行應(yīng)用將會有較好的效果。
關(guān)鍵詞:PLC主控制器;多工位;自動化;機械臂
中圖分類號:TP242;TP273
文獻標(biāo)識碼:A
文章編號:1001-5922(2020)09-0181-04
隨著工業(yè)化進程的不斷發(fā)展,科學(xué)技術(shù)給人類的生活帶來了翻天覆地的變化,極大的改善了人類的生活和生產(chǎn)。如今自動化技術(shù)應(yīng)用廣泛,尤其在機械中使用自動化,可以提高效率。機械手臂屬于工業(yè)自動化控制領(lǐng)域中新出現(xiàn)的技術(shù),具有體積小、動作靈敏、綠色環(huán)保等特點,其主要作用就是配合其他設(shè)備完成工件加工時的自動上卸料,能夠在工業(yè)制造生產(chǎn)中有著非常重要的作用[1-2]。當(dāng)前,機械手臂的應(yīng)用范圍較廣,如鍛造、貨物裝箱流水線、貨物搬運、機械加工等都可以使用機械手臂,從而可以達(dá)到降低勞動力、節(jié)約工人成本、提高工作效率的作用,還能夠提高加工生產(chǎn)時的安全性[3-4]。尤其使用機械手臂在易燃易爆、溫度異常、有毒等環(huán)境中進行使用時,可以降低對人類生命健康的影響。
傳統(tǒng)的機械臂在設(shè)計時不具備靈活性,使用的是一個機械臂負(fù)責(zé)一個工位的工作,于是在進行另外一個工序時,此時的機械臂就會處于等待狀態(tài),所以會降低生產(chǎn)效率,不利于節(jié)能。另外,傳統(tǒng)的機械臂使用的控制器件為繼電器、接觸器和計時器等,這樣的控制方式會影響控制精度。所以傳統(tǒng)的機械臂存在效率不夠高、精度低、智能型不高、穩(wěn)定性差、實時控制困難等問題。于是為了改善這些缺陷,將機械臂的配置方式和控制系統(tǒng)進行改進,使用多工位一機械臂的配置方式,即多工位高效自動上卸料機械臂,從而可以很大程度上提高工作效率提高對資源的利用率[5]。系統(tǒng)以機械臂PLC主控制器為主站,從而提高整個機械臂的生產(chǎn)效率,增強其協(xié)調(diào)性和穩(wěn)定性。
1 系統(tǒng)總體結(jié)構(gòu)設(shè)計
1.1 機械臂生產(chǎn)線布置
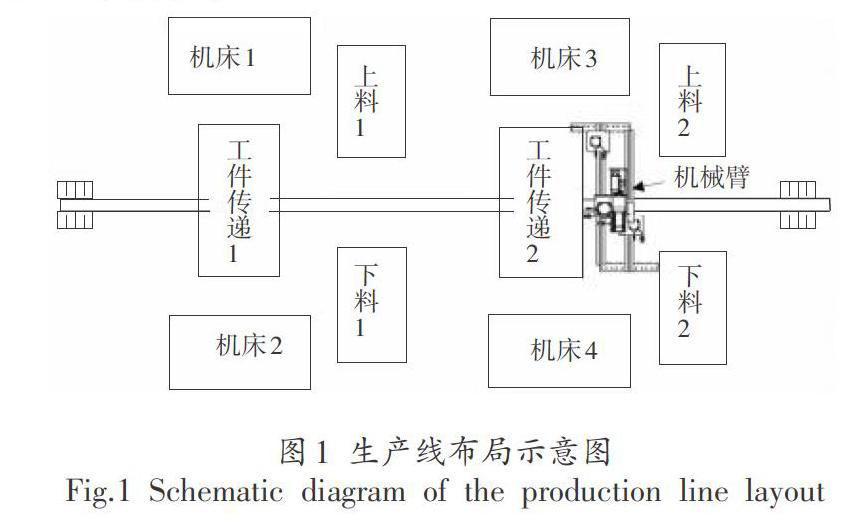
圖1即為機械臂生產(chǎn)線布置方式,其中主要的結(jié)構(gòu)有機床、上下料器、機械臂和中間傳遞組成,該生產(chǎn)線有四個工位,兩個機床1和2分別對立放置,另外兩個機床3和4也對立放置,這種方式可以節(jié)約場地,增強布局的緊湊性,從而能夠使得機械臂增加自動上卸料效率。
1.2 生產(chǎn)線網(wǎng)絡(luò)布局
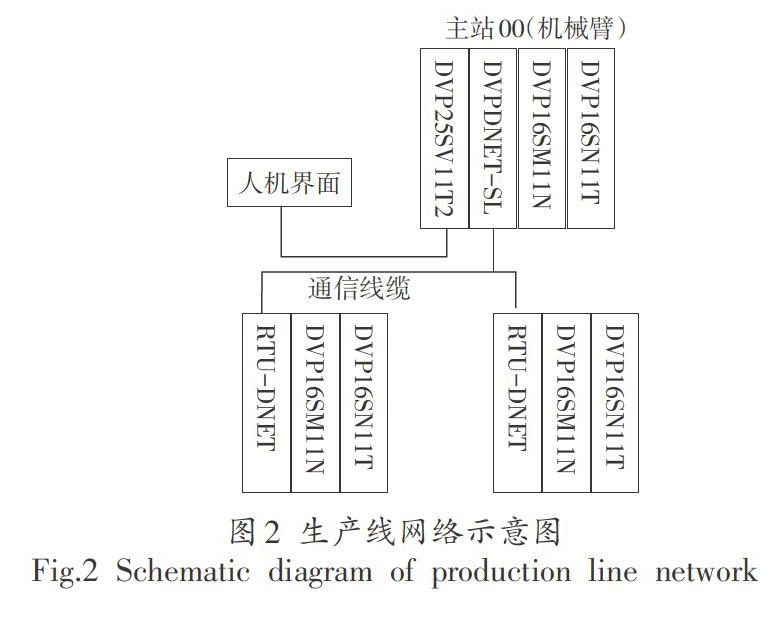
本文選擇DeviceNet現(xiàn)場總線網(wǎng)絡(luò)進行實時數(shù)據(jù)交換。DeviceNet結(jié)構(gòu)比較簡單,使用DeviceNet有利于降低成本,能夠在本文發(fā)揮良好的應(yīng)用效果,其傳輸率在125Kbitls - 500Kbitls[6]。由于DeviceNet現(xiàn)場總線網(wǎng)絡(luò)具有較好的應(yīng)用效果,在工業(yè)控制中具有廣泛的應(yīng)用[7-8]。 在生產(chǎn)線上機械臂需要控制好幾臺設(shè)備,為了能夠使之進行協(xié)調(diào)工作,并且實現(xiàn)多工位上卸料、提高工作效果,于是使用臺達(dá)系列的工控產(chǎn)品搭建,圖2即為系統(tǒng)中的網(wǎng)絡(luò)連接圖。從圖中可以看出,該主站的站號設(shè)置為00;兩個從站的站號分別為01和02,其中從站1主要有上下料器l、RTU-DNET和工件傳遞1,從站2主要有上下料器2、RTU-DNET和工件傳遞2。
1.3 機械臂工作流程
在一個工作流程中需要使用到如圖l所示的幾個構(gòu)件。然后機械臂的工作流程為如下所示:
1)機床1完成工作之后,等待在旁邊的機械臂就開始工作;
2)此時機械臂需要完成的工作就是取下機床1中的工件,然后移動機械臂將工件放到傳遞1上;
3)此時機械臂還需要繼續(xù)工作,即從傳遞1處移動到上料1處將需要加工的工件放到機床1上;
4)此時機械臂已經(jīng)完成一個重復(fù)工作,同時機床2處也已經(jīng)處于加工狀態(tài),并且快要加工好,于是機械臂完成一個重復(fù)動作之后直接去往機床2等待其加工完,然后再完成一個重復(fù)性工作。
2 機械臂結(jié)構(gòu)與控制要求
2.1 機械臂結(jié)構(gòu)
基于PLC主控制器的系統(tǒng)使用的動力設(shè)備為閉環(huán)伺服電機,機械臂的軸在運動時主要是根據(jù)齒輪帶動齒條得到的動力,從而可以使得機械臂在往返的移動過程中具有平穩(wěn)的狀態(tài),并且移動的距離也非常精確。
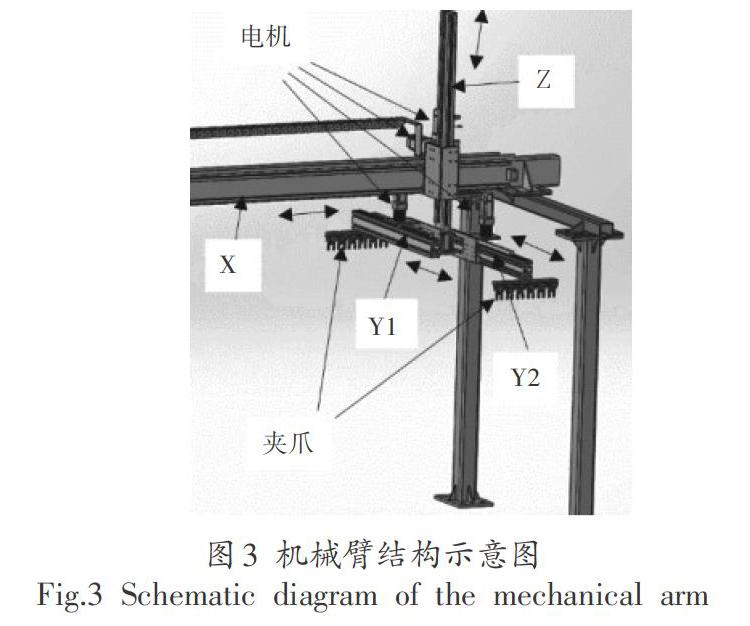
本文所設(shè)計的機械臂的結(jié)構(gòu)為四軸聯(lián)動,圖3即為該結(jié)構(gòu)的示意圖,其中有3個不同的方向,X軸使得機械臂實現(xiàn)左右移動,Z軸使得機械臂實現(xiàn)上下移動,另外一個方向使得機械臂實現(xiàn)縱向前后伸縮,在Y軸中需要配有氣動手抓,從而實驗前后伸縮運動,通過這三個方向的共同作用,機械臂可以實現(xiàn)與機床進行配合然后實現(xiàn)夾取工件的任務(wù)。
2.2 機械臂控制要求
本文所研究設(shè)計的系統(tǒng)需要能夠?qū)崿F(xiàn)多工位自動上卸料的工作目的,其中起主要作用的機械臂需要有良好的控制作用,于是對其控制提出7點要求。
1)機械臂能夠?qū)崿F(xiàn)整體的上下移動,并且能夠?qū)崿F(xiàn)位置保。
2)機械臂能夠?qū)崿F(xiàn)整體的左右移動和前后伸縮。
3)機械臂能夠?qū)崿F(xiàn)多軸聯(lián)動。
4)能夠?qū)C械臂移動的3個方向進行原點位置設(shè)置,并且發(fā)生斷電之后,之前設(shè)置的原點位置不會發(fā)生變化。
5)主站和從站之間能夠進行實時的互相通信。
6)圖3中的4個軸有正反行程極限位置保護。
7)機械臂的關(guān)鍵參數(shù)能夠?qū)崟r的顯示出來,并且能夠調(diào)整相關(guān)參數(shù),于是能夠得到更加準(zhǔn)確的參數(shù)。
3 機械臂控制系統(tǒng)設(shè)計
3.1控制系統(tǒng)的組成和原點分配
3.1.1 控制系統(tǒng)的組成
在機械臂控制系統(tǒng)設(shè)計中,電氣設(shè)備控制系統(tǒng)非常重要,直接關(guān)乎著生產(chǎn)加工的效率,而中央控制單元作為電氣設(shè)備控制系統(tǒng)中最重要的組成部分,本文選擇了基于PLC主控制器的多工位自動化上卸料機械臂系統(tǒng)設(shè)計研究。本文研究的控制系統(tǒng)的主要組成部分如圖4所示,其中主要包含9個模塊。
3.1.2原點分配
通過控制系統(tǒng)的功能分析,需要對機械臂PLC的原點進行分配,其分配方式如表1所示。
3.2控制系統(tǒng)主要器件選型
在選擇控制系統(tǒng)的主要器件時,不能僅僅考慮到器件的成本、功能等,還需要考慮到對設(shè)備功能擴充升級和與啊你單分配表點位圖,需要對預(yù)留備用原點,并且原點個數(shù)為總數(shù)的20%,于是選擇主機臺達(dá)DVP28SVIIT2,因為這種主機方便擴展,另外將臺達(dá)DVP16SNIIT作為輸出擴展模塊,然后將DVP16SMIIN作為輸入擴展模塊。
在系統(tǒng)中主站和從站之間一定要能夠?qū)崿F(xiàn)實時通信,才能實現(xiàn)多工位自動上卸料,于是DeviceNet通信網(wǎng)絡(luò)使用臺達(dá)DVPDNET-SL、RTU-DNET與PLC,能夠?qū)崿F(xiàn)較好的通信效果。為了使系統(tǒng)有更好的智能型和可控制性,加人人機交互,其中使用的人機界面為臺達(dá)DOP-BIOS411。
4 控制系統(tǒng)程序設(shè)計
4.1 PLC程序設(shè)計
控制系統(tǒng)中程序設(shè)計屬于核心部分,當(dāng)程序設(shè)置不合理時將會影響系統(tǒng)的運作。本系統(tǒng)選擇自動程序和手動程序相結(jié)合的方式。然而這種方式容易發(fā)生混亂,于是為了系統(tǒng)的安全可靠性,加入了互鎖、自鎖和報警程序。PLC程序在設(shè)計過程中,加上了適當(dāng)?shù)难訒r,從而提高設(shè)備的平穩(wěn)度和精確度。并且還對傳感器進行邏輯處理,從而提高設(shè)備的智能型。當(dāng)出現(xiàn)不符合加工要求時,從而發(fā)出警報并且停機。如圖5所示,該圖主要是機床1和2的流程,而機床3和4的程序流程與之一樣。
4.2人機界面設(shè)計
系統(tǒng)采用人機界面設(shè)計形式,能夠增加系統(tǒng)的運行穩(wěn)定性和精確性。界面采用的觸摸屏界面,使用臺達(dá)DOPSoft 2.00.07.02軟件進行開發(fā)。人機界面設(shè)計中需要包含自動操作和手動操作,還需要有伺服電機的位置和參數(shù)設(shè)定、報警信息和傳感器狀態(tài)等模塊,從而可以將各種信息顯示出來,更有利于操作者對其進行掌控。圖6和圖7即為自動界面和參數(shù)設(shè)定界面圖。
4 結(jié)語
基于PLC主控制器、利用DeviceNet網(wǎng)絡(luò),設(shè)計多工位自動化上卸料機械臂系統(tǒng)能夠?qū)崿F(xiàn)一個機械臂負(fù)責(zé)幾個工位的工作目標(biāo),從而降低機械臂閑置時間,達(dá)到節(jié)約資源的作用,并且還提高了生產(chǎn)效率,還能夠提高控制實時性。總之該系統(tǒng)具有效率高、智能化、穩(wěn)定性、實用性等優(yōu)勢,應(yīng)用于工業(yè)生產(chǎn)中將會有比較好的效果。
參考文獻
[1]高微,楊中平,趙榮飛,等.機械手臂結(jié)構(gòu)優(yōu)化設(shè)計[J].機械設(shè)計與制造,2006(01):14-16.
[2]郭斌,王彥明,陸藝,等.沖床上下料機械手臂及驅(qū)動系統(tǒng)設(shè)計[J].機械傳動,2016,40(02):150-153+157.
[3]王陽,李雷遠(yuǎn),基于Kinect的機載機械手臂抓取方法研究[J].電子設(shè)計工程,2020,28(04):147-152+157.
[4]陳金艦,工業(yè)生產(chǎn)中機械搬運手臂自動化控制研究[J].新型工業(yè)化,2019,9(08):77-78+83.
[5]王延年,丁恒,多工位沖壓生產(chǎn)線自動送料機械手控制系統(tǒng)設(shè)計[J].鍛壓技術(shù),2016,041(006):55-60.
[6]張建峰.DeviceNet現(xiàn)場總線網(wǎng)絡(luò)通信技術(shù)的研究[D].天津:天津理工大學(xué).
[7]李疆.DeviceNet現(xiàn)場總線在包裝生產(chǎn)線上的應(yīng)用[J].制造業(yè)自動化,2013,035(001):147-149.
[8]趙小剛,基于CAN總線技術(shù)的機械臂自動控制系統(tǒng)設(shè)計[J].自動化與儀器儀表,2016(10):56-58.
作者簡介:何克祥(1963-),男,漢族,陜西乾縣人,碩士研究生,副教授,研究方向:機械設(shè)計理論研究及教學(xué)。
猜你喜歡
中國科技博覽(2016年27期)2017-01-23 01:32:28
農(nóng)機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學(xué)學(xué)報·自然科學(xué)版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科技視界(2016年20期)2016-09-29 14:13:02
科技視界(2016年20期)2016-09-29 13:45:10