醫用機器人標準體系研究
2020-10-12 01:31:54張超孟祥峰王權王浩唐橋虹李佳戈
中國醫療設備 2020年9期
張超,孟祥峰,王權,王浩,唐橋虹,李佳戈
中國食品藥品檢定研究院 醫療器械檢定所,北京 102629
引言
近年來,作為一個國家科技發展和高端制造業水平的重要標志,機器人特別是醫用機器人產業發展受到了世界各國的高度關注。國務院、科技部、工信部等自2012 年開始出臺了一系列政策文件[1-4]支持醫用機器人領域的發展,科技部高技術研究發展中心從2016 年開始啟動實施的“智能機器人”重點專項[5-7]和生物中心的“數字診療裝備研發”重點專項[8-10]則提供了良好的科研環境,旨在加速推進我國醫用機器人技術與產業的快速發展。
隨著系列政策的支持引導以及科研上的大力投入,我國醫用機器人產業也取得了一定的成績,在研發方面已實現專科化發展,部分產品已經取得了醫療器械注冊證。但是,我國的醫用機器人產業在持續向好的同時依然面臨挑戰和困難,部分企業核心技術研發能力及產品質量還有待提高。以目前臨床應用較為廣泛的手術機器人為例,有研究表明,手術機器人在實際臨床使用過程中存在較大的安全風險,出現了較多的不良事件,機器人本身出現的技術問題就包括:軟件問題、器械掉落、熱灼傷、意外操作、電纜/電源問題等,對患者造成了不同程度的傷害[11]。2019 年11月份,美國FDA 發布了一則關于一款手術機器人平臺的Ⅰ類(最嚴重的級別)召回信息,召回的原因是軟件可能將機械臂驅動到錯誤的位置,對患者造成危險[12]。標準是產業發展和質量技術基礎的核心要素,在醫用機器人發展中具有基礎性和引導性的作用,因此亟需建立符合我國國情的醫用機器人標準體系,為開展全面、科學、統一的質量評價提供必要的依據,為產品的上市審批提供技術支撐,同時可以有效固化前期的研究成果,促使我國醫用機器人產業向高端化發展,提高核心競爭力。
1 標準體系的研究
1.1 標準化現狀
在國際方面, 國際標準化組織(International Organization for Standardization,ISO)和國際電工委員會(International Electrotechnical Commission,IEC)是從事機器人標準化方面工作的兩大主要組織。1983 年ISO/TC184/SC2 制造環境機器人分技術委員會成立,初期主要從事與工業安全相關的詞匯和性能方面的標準化工作,隨后為了適應機器人技術的發展,ISO/TC184/SC2 升級成為ISO/TC299 機器人技術委員會,其工作范圍除工業機器人外也包含醫用機器人等非工業領域,但是目前沒有形成專門針對醫用機器人的專用標準體系。在IEC 方面,醫用機器人的標準化工作主要由IEC/TC62 技術委員會承擔,其與ISO/TC299 組成的聯合工作組JWG35 和JWG36 在2019 年7 月份發布了IEC 80601-2-77[13]和IEC 80601-2-78[14]標準,這兩個標準是作為醫用電氣設備基本安全和基本性能通用要求標準的修改和補充,旨在明確手術機器人和康復機器人的基本安全要求和基本性能要求,有助于制造商在設計研發過程中開展更為全面的風險控制活動,同時為該類產品上市前安全性方面的質量評價提供基本依據,但是這兩個標準并未涉及有效性方面的要求。
在我國,目前已發布的整機標準、部件標準、檢測方法標準均是針對工業機器人、服務機器人等(部分已發布標準情況見表1),未涉及醫用機器人。

表1 SAC/TC159/SC2 部分已發布標準情況
為了適應醫用機器人產業的迅猛發展,2016 年由中國食品藥品檢定研究院(國家局醫療器械標準管理中心),以下簡稱:中檢院)牽頭,成立了醫用機器人標準化專項工作組,開啟了我國醫用機器人的標準化工作,對我國醫用機器人產業起到了積極的指導與促進作用,為標準預研提供前期的技術儲備工作。2020 年2 月,由中檢院等單位起草的YY/T 1686-2020《采用機器人技術的醫用電氣設備分類》標準發布,IEC 80601-2-77 和IEC 80601-2-78 標準的轉化工作也已經正式立項。2019 年8 月,國家藥品監督管理局批復同意由中檢院組織籌建醫用機器人標準化技術歸口單位,籌建方案已于2020 年4 月進行公示[15]。歸口單位的成立將有助于建設針對醫用機器人的標準體系,解決醫用機器人標準缺失問題。
1.2 標準體系的設計思路
與傳統醫療器械相比,醫用機器人是一種融合了醫學、電子、機械、光學、人機接口、模式識別等多領域的綜合性醫療器械[16-17],軟硬件層面往往包括多個組成部件[18],相互之間需要進行通訊、控制,各部件的質量會直接或者間接影響到整個機器人系統的正常運行。目前醫用機器人主要分為手術機器人和康復及功能補償類機器人兩大類,在手術機器人中又主要分為主從遙控式和圖像引導式兩個小類。本文將從如下六個方面進行設計。
1.2.1 通用定義方面
從醫用機器人整體層面分析,該類產品所涉及的領域廣泛且深入,存在學科交叉的情況,因此存在術語指向、分類定義不清晰的問題,亟需統一行業內的術語、定義、分類,便于后續工作的開展。
1.2.2 可靠性方面
目前,可靠性要求在醫療器械領域剛剛起步,但是醫用機器人通常情況下是為了替代或部分替代人進行高精度、高負荷的操作,往往存在大量的往復運動,在預期使用壽命期間機器人應當能夠保持初始設計的精度要求,因此可靠性是醫用機器人的潛在通用風險,應當充分考慮軸連續運轉、長期運轉、過度運轉以及系列可能存在的單一故障所帶來的精度及功能損失。
1.2.3 可用性方面
隨著醫療器械功能的日益復雜,醫療器械在使用過程中出現的問題也越來越多,已嚴重影響到醫療器械的安全性和有效性,其根源主要在于醫療器械可用性設計存在問題。手術機器人就是一個典型的例子,在一場手術中,手術機器人的預期使用角色可能包括主刀醫生、助手、廠家代表等,各角色都需要不同程度的操作機器人,這些操作都會影響手術的進程,進而關系著患者的安全。美國FDA在2016 年發布了一項指南草案[19],指明手術機器人需要提交可用性證明資料。康復機器人通常用于失能或部分失能患者的功能恢復與補償,這類患者的力量和反應速度都處于較低的水平,一旦出現故障而患者或操作人員無法及時停止設備則會對患者造成傷害。因此在標準體系中應當對醫用機器人的可用性作為通用要求進行考慮。
1.2.4 系統集成方面
在通訊接口方面,醫用機器人各部件間及對外界需進行數據傳輸和交換,其對外的通訊接口和通訊協議均應為通用的標準格式,以便做到互聯互通,用于保證醫用機器人與醫院已有軟硬件之間的兼容性。在機械接口方面,可更換手術附件與機器人的安裝接口應制作成便于快速更換同時具備一定機械強度的,該接口可以是無菌邊界的一部分。
1.2.5 部件級性能及測試方法方面
醫用機器人多以系統的形式出現,不同部件都有各自的技術特性以及潛在的安全風險,因此關鍵部件的性能會直接影響著整個系統的性能。以主從遙控式手術機器人為例,其3D 內窺鏡和3D 顯示裝置是最為重要的實時影像獲取裝置,如果圖像畸變、信噪比、色彩還原性等指標無法達到醫用級別的要求,3D 效果帶來的眩暈感及視覺疲勞,都有可能導致醫生的誤操作進而對患者造成危險,因此在建立各類產品專用標準前有必要對醫用機器人各關鍵部件的性能指標提出要求,對應有的特殊技術的檢測評定方法進行研究。
1.2.6 產品級性能及安全方面
作為醫療器械產品,醫用機器人須滿足安全性和有效性兩方面的要求。安全性方面,醫用機器人各組成部件間連接方式的不同可能導致漏電流、保護接地阻抗和電磁兼容方面的差異,不同的工作模式和基本性能選擇也會對其電磁兼容性造成影響[20],因此有必要對其電氣安全和電磁兼容方面進行特殊的要求。機械安全方面,在使用機器人進行手術或康復訓練時,與患者安全最為相關的是機械方面的危險,例如主從遙控式手術機器人,機械臂的末端執行器往往是鋒利的手術剪、刀,甚至是帶有高頻電的手術附件,如果手術器械穿過人體皮膚后用以支撐完成各種操作的中心點不穩定,機械臂本身到達極限位置或是主從操作映射比例不合理,都有可能造成患者的意外傷害。對于圖像引導式手術機器人,通常是在患者的術前影像上進行手術路徑的規劃,術中進行配準和導航,由機器人自行完成手術切入點的對準或是部分鉆骨、磨骨、植入的動作,在系列動作中是否加入了防碰撞或力反饋機制來保證患者安全,這都需要專用的機械安全標準來進行考量。有效性方面,除了前文提到的部件級的性能驗證,系統級的性能則與治療效果更為直接相關,例如主從遙控式手術機器人應當考慮從成像端到顯示端、從主端動作到從端動作的整體延遲,圖像引導式手術機器人應當考慮包含圖像配準和實時導航在內的系統定位精度,康復機器人應當考慮到達某一指定位姿時各軸的角度及整體的柔順性。
從技術的未來發展趨勢分析,隨著機器人技術本身的飛速發展,其在醫療器械中的應用也將逐漸深入,除了目前較為成熟的腹腔鏡手術機器人、骨科手術機器人、上下肢康復機器人外,已經有諸如經人體自然腔道的手術機器人[21-22]、膠囊檢查機器人[23-24]、穿刺活檢機器人[25-27]、具備腦機接口的康復機器人[28-29]等新型應用機器人技術的醫療器械出現,待到技術儲備成熟、已上市產品情況滿足產品標準的申報條件,即可進行產品整機標準的研制,對某一類醫用機器人產品的通用要求、技術要求、試驗方法、檢驗規則、標簽與標志、包裝、運輸等進行規范。同時可以對新技術帶來的新的潛在風險及科學的評價方法開展研究。因此標準體系需要具有一定的前瞻性。
基于以上分析,在進行標準體系設計時,總體思路是應當從部件到系統、從通用到專用、從安全到性能進行全方位的考量,既考慮當下又要做到著眼未來。針對前文所述的醫用機器人產品本身的技術特點、特殊風險以及機器人技術在醫療器械領域應用的共性關鍵問題,同時結合醫療器械標準體系的行業背景[30-31],設計制定了醫用機器人標準體系,如圖1 所示。
該標準體系包括基礎通用標準、安全和性能標準及采用機器人技術其他相關標準三部分。基礎通用標準,該部分是標準體系的基石和保障,主要包括術語和分類、可用性及可靠性、系統集成等方面的標準。安全和性能標準重點在于突出醫用機器人作為醫療器械的特點,主要包括專用要求標準、安全標準和性能標準。采用機器人技術其他相關標準,此部分為應對技術發展的預留。
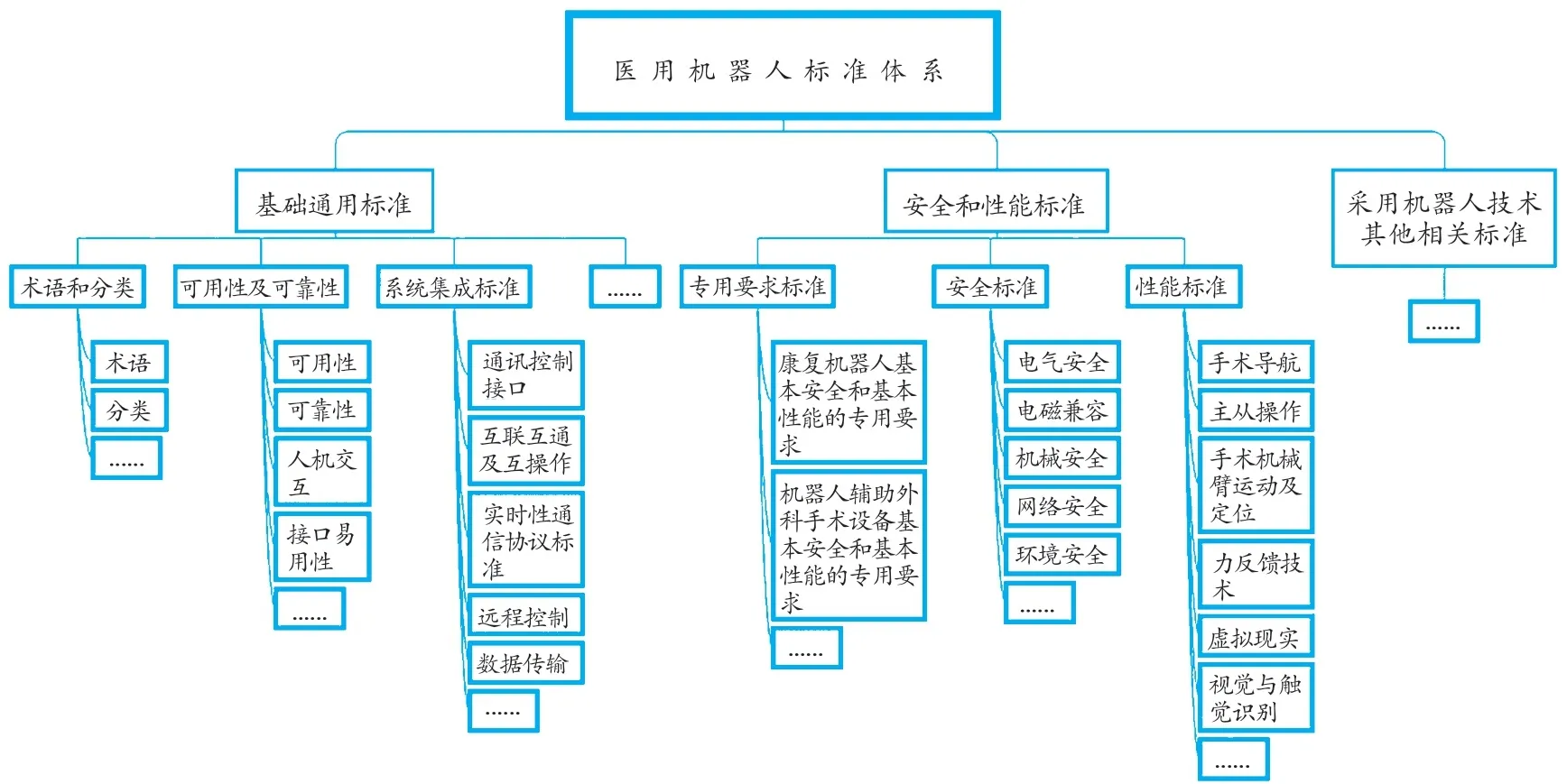
圖1 標準體系框圖
2 結論與展望
本文簡要介紹了我國醫用機器人的發展情況,較為系統的梳理了國際國內開展醫用機器人標準化的情況,針對目前尚無醫用機器人專用標準體系的現狀,從七個方面進行了分析,提出了標準體系的構建思路。所提出的標準體系包括:醫用機器人系統及部件,涉及通用要求、安全要求、性能要求和試驗方法,涵蓋手術機器人、康復機器人和正在日趨發展成熟的其他醫用機器人,覆蓋范圍全面,同時專屬性強,具有前瞻性,有助于引導醫用機器人領域標準化工作科學有序的發展,為我國醫用機器人產業的蓬勃發展保駕護航。相信隨著科技的發展,醫用機器人將作為一個載體加持越來越多,諸如5G 技術、裸眼3D、虛擬現實、腦機接口、人工智能等新技術,向著小型化、模塊化、智能化發展,自治程度將逐漸提高,人機交互的方式也將日益友好,進一步降低醫生的疲勞感和患者的潛在損傷。這些新技術的應用也將會使現有的評價體系和標準體系不斷的面臨挑戰,需要我們去不斷的完善和豐富,充分發揮標準的規范和引領作用。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
新世紀智能(數學備考)(2020年11期)2021-01-04 00:38:16
河北畫報(2020年10期)2020-11-26 07:20:50
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
專用汽車(2016年4期)2016-03-01 04:13:43
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
新高考·高一物理(2014年1期)2014-09-18 01:26:07
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:36
共產黨員(遼寧)(2011年23期)2011-10-18 09:29:10