免像控?zé)o人機(jī)高清傾斜攝影三維建模精度分析
2020-10-12 04:36:38羅楓
鐵道勘察 2020年5期
關(guān)鍵詞:模型
羅 楓
(中鐵二院工程集團(tuán)有限責(zé)任公司,四川成都 610031)
1 概述
無人機(jī)傾斜攝影測量技術(shù)顛覆了以往只能從垂直角度拍攝的局限。該方法可從多個視角采集影像,更加真實(shí)地反映地物情況和地理信息,包括外觀、位置、高度等屬性,彌補(bǔ)了傳統(tǒng)二維制圖的不直觀、人工建模仿真度低的缺陷[1-2]。然而,對于地形落差較大的區(qū)域,常規(guī)無人機(jī)傾斜攝影難以獲取高分辨率的影像數(shù)據(jù),為滿足工程需求,通常需要布設(shè)大量的地面控制點(diǎn),并將模型轉(zhuǎn)換為鐵路工程所需坐標(biāo)系,這將大大增加航測工作量和延長生產(chǎn)周期。
以下探索單鏡頭無人機(jī)在不同航高模擬傾斜攝影[3],輔以人工細(xì)節(jié)拍攝,并利用網(wǎng)絡(luò)RTK(Real-time kinematic)的方式獲取曝光點(diǎn)高精度大地坐標(biāo),再對其三維坐標(biāo)進(jìn)行轉(zhuǎn)換,以實(shí)現(xiàn)采用免刺像控點(diǎn)的方式進(jìn)行工程所需坐標(biāo)系的模型重建。
2 無人機(jī)傾斜攝影測量作業(yè)流程
圖1為無人機(jī)傾斜攝影測量技術(shù)流程,無人機(jī)傾斜攝影測量主要包括航飛前準(zhǔn)備工作、外業(yè)航飛作業(yè)、內(nèi)業(yè)數(shù)據(jù)處理3方面。其中,關(guān)鍵步驟為外業(yè)航線設(shè)計(jì)和內(nèi)業(yè)空三加密[4]。所使用的免像控方法無需進(jìn)行像控點(diǎn)布設(shè)、GPS差分?jǐn)?shù)據(jù)處理及像控點(diǎn)量刺,能極大地節(jié)省內(nèi)外業(yè)時間,為搶險(xiǎn)救援贏得寶貴時間。

圖1 無人機(jī)傾斜攝影技術(shù)流程
3 實(shí)例分析
3.1 項(xiàng)目簡介
2019年7月底至8月中旬,受持續(xù)強(qiáng)降雨影響,四川涼山州地區(qū)發(fā)生數(shù)次山體崩塌等地質(zhì)災(zāi)害,致使西南山區(qū)某鐵路部分段落沖毀,被掩埋線路長達(dá)70 m。為及時開展搶險(xiǎn)救災(zāi)工作[5],需要對受災(zāi)區(qū)域進(jìn)行快速三維地形重建。
測區(qū)位于牛日河峽谷區(qū)域,東西長0.5 km,南北長約1 km,覆蓋面積約0.5 km2;測區(qū)地形高差約400 m,地形等級為Ⅳ級[6]。
3.2 免像控傾斜攝影無人機(jī)系統(tǒng)
無人機(jī)傾斜攝影通常采用五鏡頭或者多角度兩鏡頭,為增加續(xù)航減輕重量,工業(yè)級無人機(jī)通常不配備避障模塊。但測區(qū)內(nèi)現(xiàn)場交通中斷,地災(zāi)體隨時有二次崩塌的危險(xiǎn),常規(guī)地面測量和控制點(diǎn)布設(shè)難以進(jìn)行。因此,使用帶避障功能的大疆Phantom 4 RTK版無人機(jī)。該無人機(jī)是一款小型多旋翼高精度航測無人機(jī),主要面向低空攝影測量,具備厘米級導(dǎo)航定位系統(tǒng)和高性能成像系統(tǒng),可以實(shí)現(xiàn)免像控傾斜攝影數(shù)據(jù)的采集,數(shù)據(jù)生產(chǎn)符合《低空數(shù)字航空攝影規(guī)范》、《三維地理信息模型數(shù)據(jù)產(chǎn)品規(guī)范》的相關(guān)要求[7-8]。
為實(shí)現(xiàn)免像控三維重建,首先應(yīng)提升曝光點(diǎn)的坐標(biāo)精度。 Phantom 4 RTK集成全新RTK 模塊,可通過4G無線網(wǎng)卡或 WiFi 熱點(diǎn)與 NTRIP(Networked Transport of RTCM via Internet Protocol)連接,提供實(shí)時厘米級定位數(shù)據(jù)。該無人機(jī)基本參數(shù)如表1所示。

表1 Phantom 4 RTK無人機(jī)基本參數(shù)
其次,應(yīng)修正曝光時間延遲及天線相位中心偏置。Phantom 4 RTK可實(shí)現(xiàn)飛控、相機(jī)與 RTK 的時鐘系統(tǒng)微秒級同步,相機(jī)成像時刻毫秒級誤差。此時,應(yīng)對相機(jī)鏡頭光心位置和 RTK 天線中心點(diǎn)位置進(jìn)行補(bǔ)償,以減少位置信息與相機(jī)時間誤差,為影像提供更精確的位置信息。相機(jī)基本參數(shù)如表2所示。

表2 相機(jī)參數(shù)
3.3 傾斜攝影航線設(shè)計(jì)
常規(guī)無人機(jī)傾斜攝影測量一般設(shè)計(jì)為定高航線,通過單向飛行即可獲取多角度影像紋理數(shù)據(jù)。但在大落差山區(qū),特別是山腳等重點(diǎn)關(guān)注區(qū)域,其分辨率往往較差。
Phantom 4 RTK無人機(jī)為單鏡頭,通過調(diào)整云臺角度和航向角即可進(jìn)行五向飛行,以模擬常規(guī)傾斜攝影[9]。
由于滑坡和崩塌所在位置落差較大,常規(guī)的傾斜攝影航線難以顧及山體側(cè)面尤其是山腳處。因此,決定采用“模擬傾斜攝影”及“地質(zhì)災(zāi)害部位高清補(bǔ)拍”的航線設(shè)計(jì)方案進(jìn)行航飛作業(yè)。航線敷設(shè)示意如圖2,具體方案如下。
(1)傾斜航線
綜合考慮測區(qū)地形高差與起飛點(diǎn)高度,采用角度30°、相對起飛點(diǎn)航高400 m、井字形的傾斜航線,航向重疊度為75%,旁向重疊度為70%,以獲取整個區(qū)域的傾斜影像數(shù)據(jù)。
(2)手動拍攝
為提升地質(zhì)災(zāi)害體重點(diǎn)關(guān)注部位的光學(xué)分辨率,滿足高分辨率三維模型重建,采用手動模式,距離被拍攝物約30 m對山體崩塌部位及鐵路線位置進(jìn)行多角度拍攝,以獲取分辨率優(yōu)于2 cm 影像數(shù)據(jù)。
(3)中間高度航線
由于手動拍攝的影像分辨率與固定航高的正射影像分辨率相差較大,在采用免刺控制點(diǎn)時,空三容易分層,而采用手工添加連接點(diǎn)的方式又會極大增加內(nèi)業(yè)工作量[10]。因此,決定添加相對航高300 m、200 m、150 m,航向重疊度70%,旁向重疊度60%的航線,以獲取測區(qū)的正射影像數(shù)據(jù)。
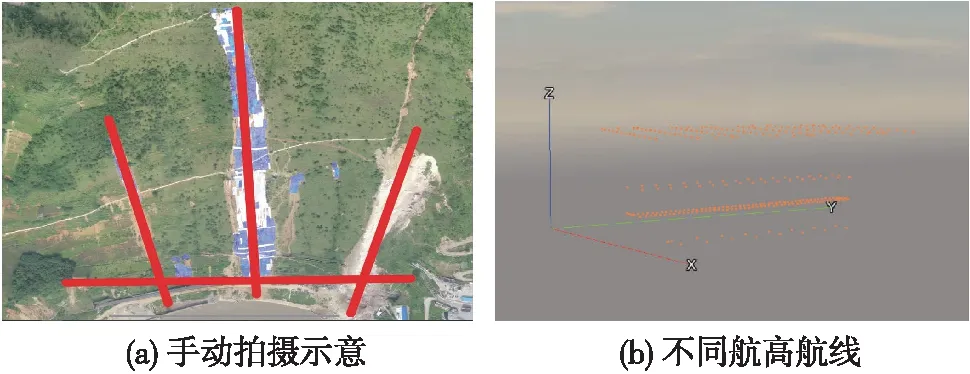
圖2 航線敷設(shè)示意
3.4 內(nèi)業(yè)空三及建模處理
(1)曝光點(diǎn)坐標(biāo)轉(zhuǎn)換
傳統(tǒng)的傾斜攝影測量曝光點(diǎn)坐標(biāo)精度較低,為獲取高精度模型成果,將成果轉(zhuǎn)為工程獨(dú)立坐標(biāo)系,通常需要布設(shè)大量可靠的像控點(diǎn),但是對于搶險(xiǎn)項(xiàng)目,像控點(diǎn)往往無法布設(shè)。通過網(wǎng)絡(luò)RTK可獲取曝光點(diǎn)的高精度三維坐標(biāo),平面坐標(biāo)可直接利用Global Mapper軟件,將經(jīng)緯度坐標(biāo)投影轉(zhuǎn)換為工程所需的平面投影坐標(biāo)。然而,使用Phantom 4 RTK進(jìn)行影像數(shù)據(jù)采集時,獲取的曝光點(diǎn)高程坐標(biāo)是大地高系統(tǒng),而一般鐵路工程制圖采用正常高系統(tǒng)。因此,需要對曝光點(diǎn)坐標(biāo)的高程系統(tǒng)進(jìn)行轉(zhuǎn)換。
為了實(shí)現(xiàn)轉(zhuǎn)換,可將測區(qū)高程異常值看作常數(shù)[11],采用求取測區(qū)平均高程異常值的方法進(jìn)行高程異常改正,具體方法如下:在測區(qū)內(nèi)的鐵路干線線位附近,選取適量具有大地高和正常高2套坐標(biāo)系成果的已有控制點(diǎn)數(shù)據(jù),計(jì)算測區(qū)平均高程異常值[12]。
(2)三維場景重建
外業(yè)數(shù)據(jù)整理后,使用Context Capture Center軟件進(jìn)行空三計(jì)算和模型重建。傳統(tǒng)傾斜攝影測量需要在獲取影像中進(jìn)行像控點(diǎn)量刺,再進(jìn)行空三計(jì)算。免像控方法則無需量刺,自動空三處理后,即可開始模型生產(chǎn),較傳統(tǒng)方式可節(jié)省1/3的內(nèi)業(yè)工作量。最終獲得如圖3所示三維實(shí)景模型。

圖3 三維模型效果
如圖4所示,在添加了手動拍攝的山體側(cè)面、重點(diǎn)工點(diǎn)細(xì)節(jié)影像后,可以清楚地辨別山體細(xì)微裂縫、鐵路及其附屬設(shè)施重要細(xì)節(jié)構(gòu)造等,使得基于實(shí)景三維模型的細(xì)微地理量測和監(jiān)控成為可能,可為應(yīng)急災(zāi)害搶險(xiǎn)工作提供可靠的基礎(chǔ)地理數(shù)據(jù)。
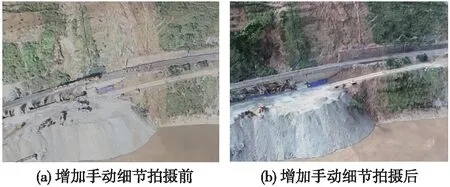
圖4 三維模型增加細(xì)節(jié)拍攝前后對比
3.5 測區(qū)三維重建模型應(yīng)用
三維模型重建不僅可以展示測區(qū)地形情況,還能進(jìn)一步生產(chǎn)多種形式的數(shù)字地形產(chǎn)品,輔助相關(guān)工作人員決策、展開搶險(xiǎn)和施工工作,包括地形圖繪制、滑坡體斷面采集和塌方量計(jì)算等[13]。若需進(jìn)行周期性傾斜攝影及建立每期的三維模型,則可在地質(zhì)災(zāi)害區(qū)布設(shè)監(jiān)測點(diǎn),以監(jiān)測災(zāi)害體的變形趨勢等[14-15]。
3.6 免像控精度驗(yàn)證
為驗(yàn)證三維模型的精度,將實(shí)測三維坐標(biāo)與模型三維坐標(biāo)進(jìn)行比較,結(jié)果如表3所示(平面中誤差為0.246 m,高程中誤差為0.220 m)。

表3 模型三維精度統(tǒng)計(jì) m
由《三維地理信息模型數(shù)據(jù)產(chǎn)品規(guī)范》的相關(guān)內(nèi)容(如表4、表5所示)可知[7],采用該方法可滿足1∶1 000比例的三維精度要求。

表4 平面精度要求 m

表5 高程精度要求 m
4 總結(jié)
采用不同航高航線設(shè)計(jì)、手動操控細(xì)節(jié)補(bǔ)拍的方法,可以清晰捕獲地質(zhì)災(zāi)害體的細(xì)節(jié)紋理,解決常規(guī)無人機(jī)傾斜攝影對于大落差山體無法獲取高分辨率圖像的問題,以及影像分辨率差異過大導(dǎo)致空三計(jì)算容易分層的問題。使用網(wǎng)絡(luò)RTK無人機(jī)進(jìn)行傾斜攝影,可以精確記錄曝光點(diǎn)位置;在小范圍內(nèi),通過既有鐵路控制點(diǎn)的大地高和水準(zhǔn)高求取測區(qū)平均高程異常值,并將其作為常數(shù)對曝光點(diǎn)三維坐標(biāo)進(jìn)行轉(zhuǎn)換,最終在免刺控制點(diǎn)條件下實(shí)現(xiàn)“正常高系統(tǒng)”的高分辨率三維模型重建,該模型成果可直接用于二維、三維地形圖生產(chǎn)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19