足式爬行機(jī)器人研究進(jìn)展與發(fā)展趨勢(shì)
2020-10-12 08:23:02陳致遠(yuǎn)涂群章張?jiān)斊?/span>蔣成明
兵器裝備工程學(xué)報(bào) 2020年9期
陳致遠(yuǎn),涂群章,張?jiān)斊?潘 明,蔣成明,黃 皓
(陸軍工程大學(xué) 野戰(zhàn)工程學(xué)院, 南京 210007)
足式移動(dòng)機(jī)器人(以下簡(jiǎn)稱為足式機(jī)器人),有別于輪式、履帶式移動(dòng)機(jī)器人,是通過驅(qū)動(dòng)類似于腿的裝置來移動(dòng)自身的機(jī)械系統(tǒng)。自20世紀(jì)60年代Mosher等[1]研發(fā)了第一款足式機(jī)器人以來,該機(jī)器人由于對(duì)復(fù)雜地形有著良好的適應(yīng)性,受到了廣大科研工作者的關(guān)注。
如圖1所示,足式機(jī)器人根據(jù)運(yùn)動(dòng)形式可以分為足式爬行機(jī)器人和足式步行機(jī)器人。足式步行機(jī)器人的腿部機(jī)構(gòu)位于機(jī)體的下方,機(jī)體、腿、足呈豎直分布,類似于哺乳動(dòng)物;足式爬行機(jī)器人的腿部機(jī)構(gòu)安裝在機(jī)體的側(cè)面,一般來說靠近機(jī)體的腿節(jié)水平布置、靠近足端的腿節(jié)豎直布置,類似于昆蟲。與步行機(jī)器人相比,足式爬行機(jī)器人可以在更寬闊的空間中選擇落腳點(diǎn),在復(fù)雜地形上展現(xiàn)出更好的通過性。另外,較大的支撐多邊形和較低的重心使得足式爬行機(jī)器人具備較好穩(wěn)定性。因此足式爬行機(jī)器人在人道主義掃雷[2]、軍事偵察[3]、星球探索[4]等領(lǐng)域具有顯著的優(yōu)勢(shì)和廣闊的應(yīng)用前景。

圖1 步行機(jī)器人與爬行機(jī)器人的不同特征效果圖
足式爬行機(jī)器人可以按照遙控指令或自主地通過步行機(jī)器人難以通過的復(fù)雜山地陡坡,這對(duì)其運(yùn)動(dòng)的精度、穩(wěn)定性、續(xù)航能力提出了很高的要求。其腿部串并聯(lián)機(jī)構(gòu)的強(qiáng)耦合性和工作環(huán)境的復(fù)雜性導(dǎo)致足式爬行機(jī)器人運(yùn)動(dòng)穩(wěn)定性的控制是一個(gè)不易解決的問題。因此,設(shè)計(jì)出結(jié)構(gòu)精良、運(yùn)動(dòng)控制精確、能量效率高的足式爬行機(jī)器人吸引著國(guó)內(nèi)外眾多研究人員,是當(dāng)今機(jī)器人領(lǐng)域的研究熱點(diǎn)之一。
本文首先對(duì)足式爬行機(jī)器人近十年來國(guó)內(nèi)外研究進(jìn)展進(jìn)行了總結(jié),將足式爬行機(jī)器人分為仿生和非仿生兩類綜述其結(jié)構(gòu)與性能特點(diǎn);從腿臂機(jī)構(gòu)的創(chuàng)新設(shè)計(jì)、穩(wěn)定性標(biāo)定技術(shù)、爬行步態(tài)規(guī)劃與運(yùn)動(dòng)控制、機(jī)器人感知技術(shù)4個(gè)方面介紹了足式爬行機(jī)器人研究的關(guān)鍵技術(shù);并對(duì)足式爬行機(jī)器人的發(fā)展趨勢(shì)進(jìn)行了展望。
1 足式爬行機(jī)器人分類及研究進(jìn)展
1.1 非仿生足式爬行機(jī)器人
國(guó)內(nèi)外對(duì)非仿生足式爬行機(jī)器人開展研究的機(jī)構(gòu)主要有賓夕法尼亞大學(xué)[5]、日本東京工業(yè)大學(xué)[6]、北京航空航天大學(xué)[7]等。按照有無可變機(jī)構(gòu)設(shè)計(jì),將上述機(jī)構(gòu)研制的幾款非仿生足式爬行機(jī)器人分為兩類分別介紹其結(jié)構(gòu)和功能,如表1所示。
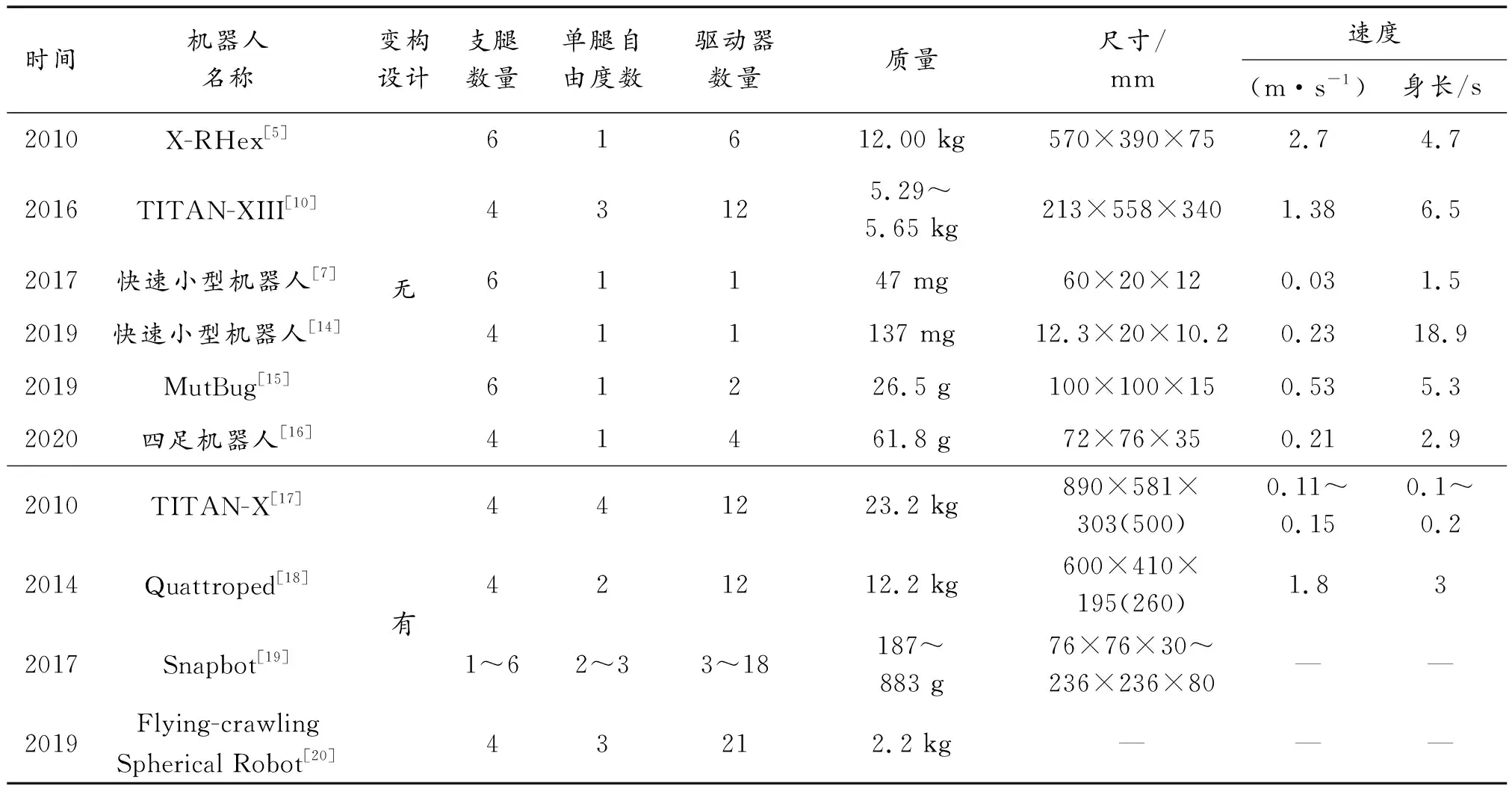
表1 非仿生足式爬行機(jī)器人列表
2010年,賓夕法尼亞大學(xué)在RHex[8]的基礎(chǔ)上研制了新一款的六足爬行機(jī)器人X-Rhex[5]。如圖2(a)所示,RHex的腿部是一個(gè)半圓形機(jī)構(gòu),通過腿部的旋轉(zhuǎn)運(yùn)動(dòng)推動(dòng)機(jī)體移動(dòng);雖然機(jī)械結(jié)構(gòu)簡(jiǎn)單,但是RHex可以實(shí)現(xiàn)爬行、前翻、爬樓梯等多種運(yùn)動(dòng)。X-RHex機(jī)體框架使用表面覆蓋碳纖維的鋁板,C型腿采用玻璃纖維,在減輕質(zhì)量的同時(shí)增加了框架剛度。機(jī)體更加輕巧堅(jiān)固,即使受到嚴(yán)重沖擊也能保證機(jī)體內(nèi)部硬件不受破壞。質(zhì)量的降低也在一定程度上優(yōu)化了機(jī)器人的機(jī)動(dòng)性能。

圖2 無變構(gòu)設(shè)計(jì)足式爬行機(jī)器人效果圖
2016年,東京工業(yè)大學(xué)研制了最新一款的TITAN系列機(jī)器人——TITAN-XIII[10],如圖2(b)所示。相較于之前版本的TITAN機(jī)器人[6],TITAN-XIII裝有新型的傳動(dòng)裝置,采用超高分子量聚乙烯纖維替代傳統(tǒng)絞線,因此有著更加緊湊的機(jī)身、更輕盈的質(zhì)量、更快的移動(dòng)速度、更高的比功率以及更強(qiáng)的續(xù)航能力。通常來說爬行機(jī)器人在能量效率、移動(dòng)速度上都不如步行機(jī)器人,但是TITAN-XIII的能量效率可以與步行機(jī)器人(StarlETH[11]等)比肩,它的弗勞德數(shù)(衡量機(jī)器人移動(dòng)速度的標(biāo)準(zhǔn)化系數(shù))與步行機(jī)器人(Cheetah Robot[12]等)大致相等。
如圖2(c)所示,北京航空航天大學(xué)研制了一款質(zhì)量?jī)H為190 mg的小型輕量化足式爬行機(jī)器人[7]。可以外接電源或機(jī)載電容通過鋁硅鍵合線給機(jī)身兩側(cè)的極板供電,在機(jī)身內(nèi)部形成電磁場(chǎng),利用機(jī)身內(nèi)部鎳鈦束的自激靜電作用驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)[13],速度可達(dá)30 mm/s(約1.5身長(zhǎng)/s)。但是機(jī)器人的運(yùn)動(dòng)穩(wěn)定性難以保證且無法控制其運(yùn)動(dòng)軌跡。在此基礎(chǔ)上,北京航空航天大學(xué)于2019年研制了一款新型的電磁驅(qū)動(dòng)的微型足式爬行機(jī)器人[14],如圖2(d)所示。總質(zhì)量?jī)H為137 mg的機(jī)器人最大爬行速度可達(dá)232 mm/s(約18.9身長(zhǎng)/s)。當(dāng)施加在電磁鐵上的交流電壓的頻率與系統(tǒng)的固有頻率相匹配時(shí),機(jī)身前側(cè)的永磁體和橫梁會(huì)在周期性電磁力的作用下激發(fā)共振,與橫梁連接的前腿會(huì)與地面產(chǎn)生向上向前的力,實(shí)現(xiàn)爬行機(jī)器人的向前躍動(dòng)。
2019年,國(guó)立首爾大學(xué)研制了一種可雙面爬行的六足機(jī)器人MutBug[15],如圖2(e)所示。MutBug結(jié)構(gòu)緊湊,高度僅有15 mm。無論是頂面朝上爬行還是底面朝上爬行,最大速度都可以達(dá)到0.53 m/s(約5身長(zhǎng)/s),即使在復(fù)雜地形上機(jī)體傾覆,也不會(huì)影響到MutBug的正常運(yùn)行。
2020年,哈爾濱工業(yè)大學(xué)研制了一種四足機(jī)器人[16],如圖2(f)所示。該機(jī)器人由機(jī)體、4個(gè)懸臂腿、4個(gè)偏心輪振動(dòng)電機(jī)等模塊組成。通過偏心振動(dòng)馬達(dá)的激勵(lì),懸臂腿與地面之間產(chǎn)生的摩擦力能夠驅(qū)動(dòng)機(jī)體向前、向后和轉(zhuǎn)彎運(yùn)動(dòng)。該機(jī)器人沒有復(fù)雜的機(jī)械傳動(dòng)裝置,運(yùn)動(dòng)靈活、速度快,具有一定的承載和越障能力。
為了提高機(jī)器人的移動(dòng)速度及對(duì)復(fù)雜地形的適應(yīng)能力,有些科研人員將足式結(jié)構(gòu)與輪式、履帶式、球式結(jié)構(gòu)相結(jié)合,設(shè)計(jì)了輪-足、履-足、球-足復(fù)合的可變腿部結(jié)構(gòu)。
2010年,東京工業(yè)大學(xué)研制了一款履-足復(fù)合的四足爬行機(jī)器人TITAN-X[17],如圖3(a)所示。TITAN-X可以根據(jù)地形選擇運(yùn)動(dòng)形式,在復(fù)雜崎嶇的地形上采用足式行走,在平坦或起伏不大的地形上采用履帶行駛。其爬行速度可達(dá)0.15 m/s,采用履帶行駛時(shí)可以穩(wěn)定不打滑地上下樓梯、順利通過400 mm寬的壕溝,履-足配合能夠翻越高度的是其1.8倍的障礙。
2014年,臺(tái)灣大學(xué)研制了一款輪-足復(fù)合的四足爬行機(jī)器Quattroped[18],如圖3(b)所示,其包含了結(jié)構(gòu)可變的輪腿機(jī)構(gòu):在崎嶇地形上采用的C型腿結(jié)構(gòu),能夠?qū)崿F(xiàn)類似于X-RHex機(jī)器人的爬行運(yùn)動(dòng);在平臺(tái)路面上采用的輪模式,則能夠?qū)崿F(xiàn)機(jī)器人的快速機(jī)動(dòng)。
2017年,豐田公司研制了一款模塊化的足式爬行機(jī)器人Snapbot[19],如圖3(c)所示。機(jī)器人有3組(翻滾-俯仰、偏航-俯仰、翻滾-俯仰-偏航)共18個(gè)模塊化的腿部機(jī)構(gòu),通過磁性聯(lián)軸器與機(jī)體連接0~6條腿,可以組成700種不同的構(gòu)型。機(jī)體可以識(shí)別出腿的配置方式進(jìn)而采用不同的步態(tài)進(jìn)行運(yùn)動(dòng)。
2019年,北京航空航天大學(xué)設(shè)計(jì)了一種將球形無人機(jī)與足式機(jī)器人相結(jié)合的混合式運(yùn)動(dòng)機(jī)器人[20]如圖3(d)所示。通過1個(gè)旋翼和8個(gè)尾翼可以實(shí)現(xiàn)空中飛行。在地面運(yùn)動(dòng)時(shí),可以將4條3自由度腿部機(jī)構(gòu)伸展在崎嶇地面上爬行,也可以將腿部機(jī)構(gòu)蜷縮在地面上滾動(dòng)。此外,4條腿部機(jī)構(gòu)還可以用于搬運(yùn)物體,輔助飛行著陸。目前該機(jī)器人的研制處于模擬仿真階段,尚未研制出原理樣機(jī)。
1.2 仿生足式爬行機(jī)器人
自然界中存在多種足式爬行生物,為研究仿生足式爬行機(jī)器人在運(yùn)動(dòng)機(jī)理和行為方式、感知模式和信息處理、協(xié)調(diào)控制和計(jì)算推理、能量代謝和材料結(jié)構(gòu)等多方面提供了參考。本研究按照仿生原型對(duì)國(guó)內(nèi)外研制的仿生足式爬行機(jī)器人進(jìn)行分類總結(jié),如表2所示。圖4展示了這些機(jī)器人與其仿生原型。
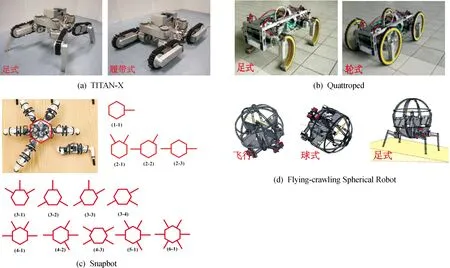
圖3 變構(gòu)設(shè)計(jì)足式爬行機(jī)器人效果圖

表2 仿生足式爬行機(jī)器人列表
2012年,南京林業(yè)大學(xué)以甲蟲為仿生原型,設(shè)計(jì)了仿生甲蟲六足機(jī)器人[21]。軀體呈橢圓形結(jié)構(gòu),六條腿分布在機(jī)體兩側(cè)。采用關(guān)節(jié)電機(jī)驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng),并且規(guī)劃了機(jī)器人的直行和定點(diǎn)轉(zhuǎn)彎步態(tài)。為減輕機(jī)器人質(zhì)量提高移動(dòng)速度,機(jī)體采用鋁合金材料,腿部采用高強(qiáng)度塑料。
2013年,哈爾濱工程大學(xué)研制了一款六足仿蜘蛛機(jī)器人[22]。機(jī)器人每條腿有3個(gè)自由度,能夠采用三角步態(tài)實(shí)現(xiàn)直行、橫行和定點(diǎn)轉(zhuǎn)彎。設(shè)計(jì)了中樞模式發(fā)生器,控制機(jī)器人的步態(tài)切換以提高對(duì)復(fù)雜環(huán)境的適應(yīng)性。
2015年,新加坡科技設(shè)計(jì)大學(xué)以一種棲息在沙漠中的獵食性蜘蛛Cebrennus rechenbergi為仿生原型研制了一款自重構(gòu)的仿生機(jī)器人Scorpio[23]。正常情況下,蜘蛛采用八條腿爬行運(yùn)動(dòng)。然而,如果受到外界刺激或威脅,蜘蛛可以快速地翻滾以規(guī)避潛在的危險(xiǎn)。基于此,Scorpio有兩種基本構(gòu)型,可以實(shí)現(xiàn)四足爬行和環(huán)形滾動(dòng)。2017年,Scorpio又被賦予了爬墻的能力用以城市環(huán)境下的偵察與搜尋任務(wù)[25]。
2015年,凱斯西儲(chǔ)大學(xué)研制了一款仿生螳螂機(jī)器人MantisBot[26]。通過分析螳螂肢節(jié)的活動(dòng)形式和關(guān)節(jié)轉(zhuǎn)動(dòng)范圍,Nicholas為MantisBot設(shè)計(jì)了28個(gè)自由度來盡可能地模擬螳螂的運(yùn)動(dòng)。

圖4 仿生足式爬行機(jī)器人及其仿生原型效果圖
2016年德國(guó)人工智能研究中心研制的仿生螳螂機(jī)器人MANTIS[27]旨在實(shí)現(xiàn)非結(jié)構(gòu)化地形上的高機(jī)動(dòng)性以及操作能力。類似于螳螂,MANTIS有四足爬行和六足爬行兩種基本運(yùn)動(dòng)姿勢(shì),其中兩條前腿可以作為手臂,通過配備的夾持器使得其能夠執(zhí)行雙臂操作。電池以及控制器等電子設(shè)備安裝在機(jī)器人機(jī)體后部類似于螳螂腹部的位置,可以平衡上半身的重量。
為了讓機(jī)器人具備水陸兩棲的運(yùn)行能力,哈爾濱工程大學(xué)于2017年研制了一款新型仿生蟹機(jī)器人[28,29]。該機(jī)器人擁有6條三自由度的爬行腿和兩條三自由度的劃槳,可以在陸地和海床爬行,也可以利用兩支劃槳在水中游動(dòng),腿槳復(fù)合驅(qū)動(dòng)拓寬了機(jī)器人的運(yùn)動(dòng)形式。實(shí)驗(yàn)結(jié)果表明,相較于傳統(tǒng)的波浪步態(tài),機(jī)器人在水中運(yùn)行時(shí)采用腿槳復(fù)合步態(tài)能夠提高54%的移動(dòng)速度并且降低45.6%的總運(yùn)輸成本(total cost of transport,TCoT)。
2018年,印度理工學(xué)院設(shè)計(jì)并制作了一款仿鱷魚機(jī)器人,Alli-bot[30]。該機(jī)器人以短吻鱷為仿生原型,有四條二自由度的爬行腿。機(jī)體軀干軸上共有4個(gè)轉(zhuǎn)動(dòng)關(guān)節(jié)可以有效模仿短吻鱷擺動(dòng)爬行。Agrawal 采用貝葉斯方法優(yōu)化了步態(tài)參數(shù),使得機(jī)器人的平均移動(dòng)速度提高了93%。
2019年,Xing等[31]研制了一種新型小型海龜式水陸兩棲機(jī)器人ASRobot,可用于執(zhí)行海底復(fù)雜環(huán)境下的探測(cè)任務(wù)。特別的,Xing設(shè)計(jì)了一種腿式多矢量水射流復(fù)合推進(jìn)機(jī)構(gòu)(Legged Multi-Vectored Water-Jet Composite Propulsion Mechanism,LMVWCPM)。該機(jī)構(gòu)由一個(gè)水射流推進(jìn)器和3個(gè)轉(zhuǎn)動(dòng)關(guān)節(jié)、3個(gè)連桿組成。利用該機(jī)構(gòu),機(jī)器人能夠在路面地形爬行,在水下環(huán)境游動(dòng)。
國(guó)內(nèi)外學(xué)者的研究探索下,仿生多足移動(dòng)機(jī)器人在仿生機(jī)構(gòu)設(shè)計(jì)與運(yùn)動(dòng)控制等方面都取得了長(zhǎng)足的進(jìn)展,并初步具有了高級(jí)生命形態(tài)特征。
2 靈巧機(jī)構(gòu)的創(chuàng)新設(shè)計(jì)
機(jī)械結(jié)構(gòu)設(shè)計(jì)是開展機(jī)器人運(yùn)動(dòng)和控制研究的前提和基礎(chǔ)。巧妙的機(jī)構(gòu)設(shè)計(jì)能夠有效地提高機(jī)器人的運(yùn)動(dòng)能力,降低對(duì)驅(qū)動(dòng)器、控制器的性能需求,拓展機(jī)器人的功能,減少機(jī)器人的能源消耗。
KeisIuke[32]為TTAN-IX設(shè)計(jì)了足端執(zhí)行器更換裝置,通過更換搭載在機(jī)體上的掃雷探測(cè)器、鏟型爪具等排雷工具,使得機(jī)器人可以應(yīng)用于人道主義掃雷行動(dòng)。當(dāng)然,如果更換其他工具,機(jī)器人還可以執(zhí)行另外的任務(wù)。四條腿采用模塊化設(shè)計(jì),當(dāng)掃雷過程中某條腿發(fā)生損壞時(shí)可以進(jìn)行替換。同時(shí),考慮到工作環(huán)境的復(fù)雜性,Keisuke在膝關(guān)節(jié)處添加一對(duì)連接大腿和小腿的子連桿擴(kuò)大了膝關(guān)節(jié)的運(yùn)動(dòng)范圍,如圖5所示。

圖5 TITAN-IX腿部機(jī)構(gòu)示意圖
2016年,Satoshi[10]為最新一代的TITAN-XIII設(shè)計(jì)了一個(gè)內(nèi)部安裝了張緊螺栓的傳動(dòng)帶輪以便于調(diào)節(jié)纖維絞線張緊力,如圖6所示,有效解決了纖維的變形伸長(zhǎng)問題。

圖6 TITAN-XII張緊裝置示意圖
設(shè)計(jì)機(jī)器蟹時(shí),陳東良[33]創(chuàng)新性地將應(yīng)變梁結(jié)構(gòu)應(yīng)用于機(jī)器蟹足端的力覺檢測(cè)與反饋系統(tǒng),這能夠極大程度地簡(jiǎn)化機(jī)構(gòu)。實(shí)驗(yàn)結(jié)果表明:系統(tǒng)測(cè)量精度高,響應(yīng)時(shí)間短,能夠有效地感知障礙物情況,提高了機(jī)器蟹對(duì)復(fù)雜障礙環(huán)境的適應(yīng)性。王立權(quán)[34]在通過蝸輪蝸桿減速器將轉(zhuǎn)矩從嵌入在肢節(jié)中的電機(jī)傳遞到關(guān)節(jié)處。利用蝸輪蝸桿傳動(dòng)的自鎖特性保證機(jī)器人在突然斷電的情況下能夠保持姿態(tài)避免傾覆損壞。
對(duì)于復(fù)合移動(dòng)機(jī)器人,Ryuichi[17]在研制腿-履復(fù)合移動(dòng)機(jī)器人TITAN-X時(shí)將履帶驅(qū)動(dòng)系統(tǒng)集成在爬行驅(qū)動(dòng)系統(tǒng)中,克服了傳統(tǒng)復(fù)合移動(dòng)機(jī)器人驅(qū)動(dòng)復(fù)雜的問題。小型輕量化的運(yùn)動(dòng)模式變換機(jī)構(gòu)克服了傳統(tǒng)復(fù)合移動(dòng)機(jī)器人質(zhì)量重、體積大的問題,能有效發(fā)揮足式和履帶式運(yùn)動(dòng)的優(yōu)勢(shì)。
在驅(qū)動(dòng)器方面,Meng[35]設(shè)計(jì)了一種由形狀記憶合金(Shape Memory Alloys,SMA)制成的彈簧驅(qū)動(dòng)的爬行機(jī)器人。該機(jī)器人通過存儲(chǔ)和釋放形狀記憶合金的彈性能量來驅(qū)動(dòng)機(jī)器人內(nèi)部的滑塊進(jìn)行往復(fù)運(yùn)動(dòng),進(jìn)而帶動(dòng)機(jī)體向前運(yùn)動(dòng)。機(jī)器人內(nèi)部機(jī)構(gòu)示意圖如圖7所示。更特別的,Alexander[36]和Kim[37]使用折紙來構(gòu)造機(jī)器人的驅(qū)動(dòng)機(jī)構(gòu),如圖8所示。折紙塔類似于彈簧可以伸長(zhǎng)和壓縮,左右兩個(gè)直流電機(jī)分別驅(qū)動(dòng)左右兩個(gè)折紙塔的伸縮,實(shí)現(xiàn)向前運(yùn)動(dòng)和轉(zhuǎn)向。紙張質(zhì)量輕的特點(diǎn)為輕型機(jī)器人的研制提供了新思路。
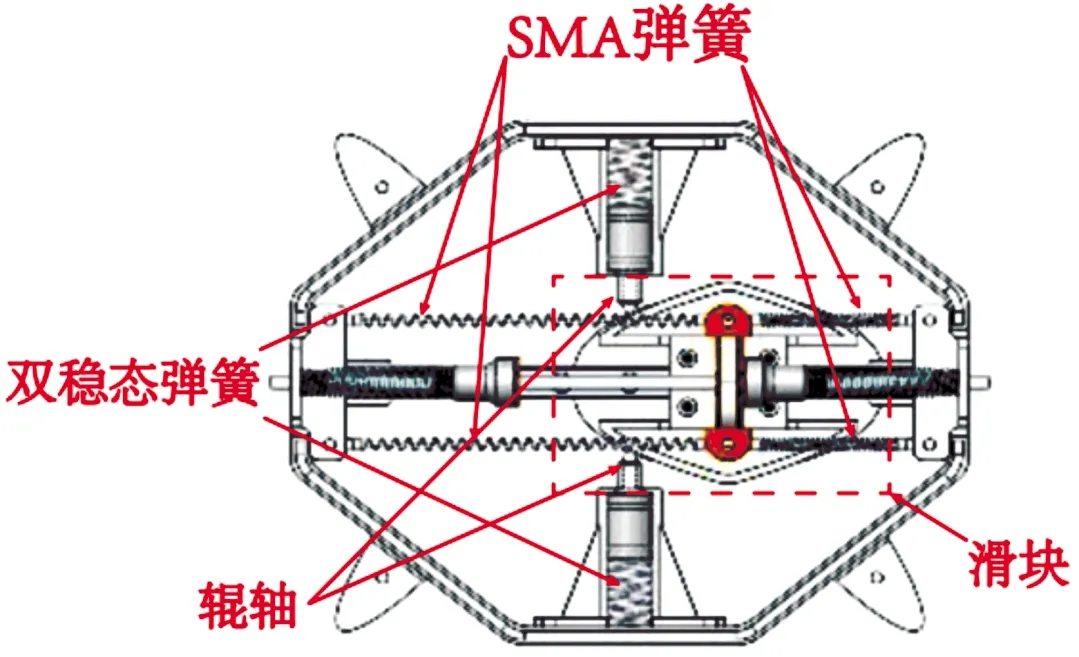
圖7 SMA彈簧驅(qū)動(dòng)機(jī)器人機(jī)構(gòu)示意圖

圖8 折紙塔驅(qū)動(dòng)機(jī)器人示意圖
正如上文所討論的,創(chuàng)新性的機(jī)構(gòu)設(shè)計(jì)能夠有效提高機(jī)器人性能,研究爬行生物的結(jié)構(gòu)機(jī)理將進(jìn)一步推進(jìn)足式爬行機(jī)器人的發(fā)展。
3 穩(wěn)定性標(biāo)定技術(shù)
足式爬行機(jī)器人的主要功能是提供穩(wěn)定的運(yùn)動(dòng),特別是在崎嶇的山地環(huán)境下不發(fā)生跌倒,因此穩(wěn)定性分析對(duì)多足機(jī)器人的控制是非常重要的。目前學(xué)者們提出了多種衡量運(yùn)動(dòng)穩(wěn)定性的判據(jù),通常分為靜態(tài)穩(wěn)定性標(biāo)準(zhǔn)和動(dòng)態(tài)穩(wěn)定性標(biāo)準(zhǔn)。本文依據(jù)判定指標(biāo)進(jìn)一步將穩(wěn)定性判據(jù)分為四類:基于距離、角度、能量、力的穩(wěn)定性判據(jù),如圖9所示。

圖9 運(yùn)動(dòng)穩(wěn)定性判據(jù)分類框圖
基于距離的穩(wěn)定性標(biāo)準(zhǔn)關(guān)注重心投影與支撐多邊形之間的距離。通過確定機(jī)器人重心的水平投影位置是否在機(jī)器人足端構(gòu)成的支撐多面體內(nèi)部來判斷其穩(wěn)定與否,并將重心的水平投影距支撐多邊形的最短距離定義為穩(wěn)定裕度(Stability Margin,SM),如圖10所示。
SSM=minLi,i=1,2,…,n
其中:n為支撐腿的數(shù)量;Li為重心水平投影位置到第支撐多邊形第i邊的距離。
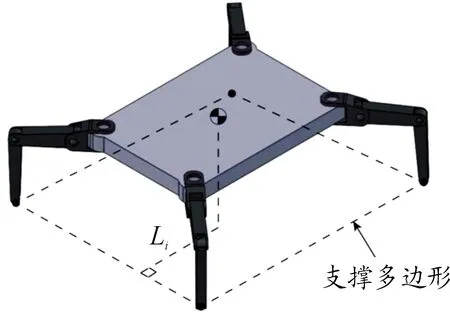
圖10 SM計(jì)算示意圖
基于角度的穩(wěn)定性標(biāo)準(zhǔn)采用作用在重心上的合力矢與支撐多邊形之間的角度作為衡量穩(wěn)定性的標(biāo)準(zhǔn)。在這類穩(wěn)定性標(biāo)準(zhǔn)中被廣泛使用的是力角穩(wěn)定裕度(Force Angle Stability Margin,FASM)[38],當(dāng)在重心上的合力矢FR與豎直方向之間的角度α的乘積為零時(shí)系統(tǒng)被判定為不穩(wěn)定,合力矢與最小角度的乘積即為FASM。然而,力角測(cè)量需要精確的接觸點(diǎn)位置和矢量計(jì)算,在不規(guī)則地形上的使用是一個(gè)嚴(yán)峻的挑戰(zhàn)。
SFASM=||FR||·min(αi)
考慮到重心高度和機(jī)器人質(zhì)量的影響,Hirose[39]和Garcis[40]分別將機(jī)器人繞支撐多邊形邊界發(fā)生側(cè)翻的最小勢(shì)能的能量穩(wěn)定裕度ESM和考慮外力以及慣性負(fù)載影響下的動(dòng)態(tài)能量穩(wěn)定裕度DESM進(jìn)行了標(biāo)準(zhǔn)化,提出了標(biāo)準(zhǔn)化能量穩(wěn)定裕度(Normalized Energy Stability Margin,NESM)和標(biāo)準(zhǔn)化動(dòng)態(tài)能量穩(wěn)定裕度(Normalized Dynamic Energy Stability Margin,NDESM)。
其中:i為支撐多邊形作為傾覆軸的邊;Δhi表示以i邊傾覆時(shí)COG高度的變化;Ei表示i邊的穩(wěn)定性度量。
當(dāng)機(jī)器人發(fā)生側(cè)翻時(shí),除了組成側(cè)翻軸的支腿,其他支腿的足端力將變?yōu)榱恪;诹Φ姆€(wěn)定性標(biāo)準(zhǔn)通過考察機(jī)器人足端接觸力的情況來判斷機(jī)器人的穩(wěn)定性。MAHDI[41]提出了一個(gè)能夠度量足端力穩(wěn)定性的判據(jù)——足端力穩(wěn)定裕度(Foot Force Stability Margin,FFSM),并基于此推導(dǎo)了適用于在線和實(shí)時(shí)控制器的改進(jìn)足端力穩(wěn)定裕度(Modified Foot Force Stability Margin,MFFSM)。
其中:fi表示第i個(gè)支撐腿足端力的豎直分量;hi為COG高度;Pi為由重心位置指向重心在支撐面投影點(diǎn)到傾覆軸垂足的向量,如圖11所示。
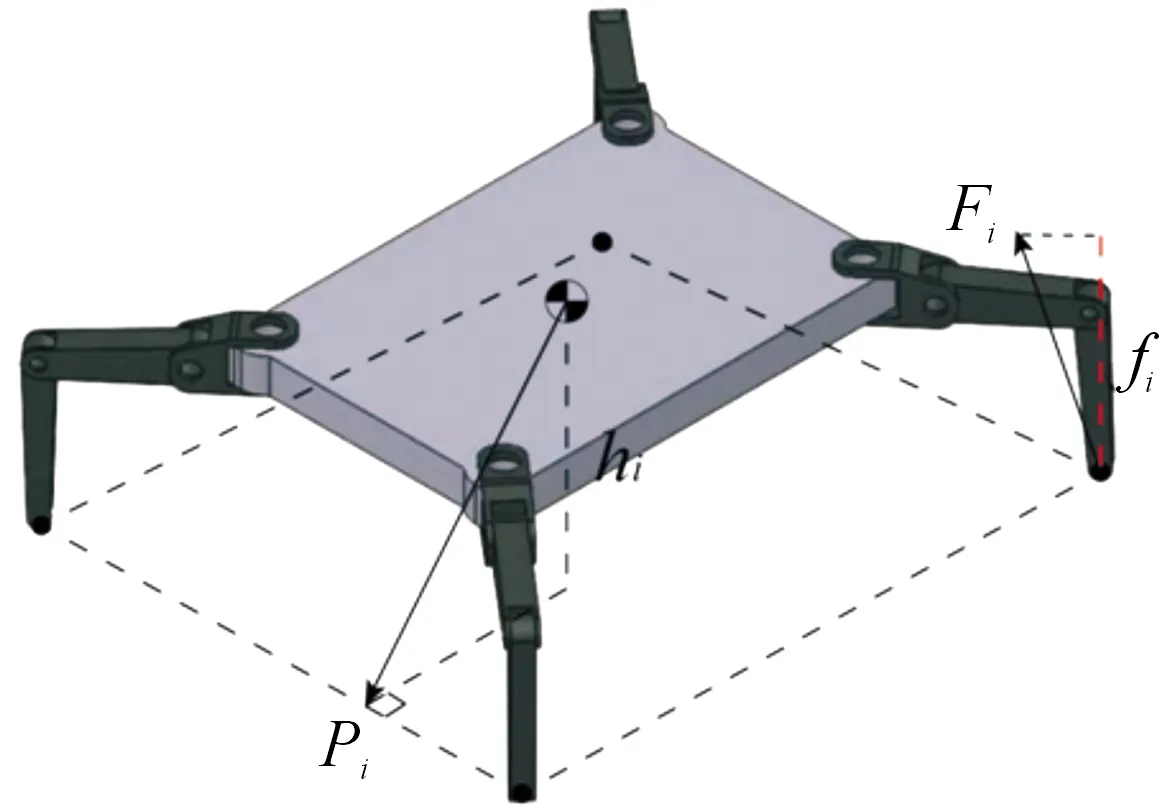
圖11 FFSM和MFFSM計(jì)算示意圖
Elena[42,43]基于SOIL4在6種不同地形上的運(yùn)動(dòng)計(jì)算了SM、FASM、NESM等穩(wěn)定裕度;Mahdi[44]對(duì)比了FASM、FFSM、MFFSM。實(shí)驗(yàn)結(jié)果均表明,應(yīng)根據(jù)機(jī)器人的應(yīng)用場(chǎng)景采用合適的穩(wěn)定判據(jù)來控制機(jī)器人的步態(tài),否則可能會(huì)影響機(jī)器人的工作性能,尤其是在不規(guī)則地形上考慮慣性力和外力影響的情況下,不存在最優(yōu)標(biāo)準(zhǔn)。
4 爬行步態(tài)規(guī)劃與運(yùn)動(dòng)控制
步態(tài)規(guī)劃的主要參數(shù)包括腿的運(yùn)動(dòng)順序和時(shí)間,以及支撐階段和運(yùn)動(dòng)階段的比例。足部爬行機(jī)器人的步態(tài)可分為周期步態(tài)和非周期步態(tài),其中周期步態(tài)可分為連續(xù)步態(tài)和非連續(xù)步態(tài)。適當(dāng)?shù)牟綉B(tài)規(guī)劃可以提高機(jī)器人的運(yùn)動(dòng)速度,增加穩(wěn)定性裕度,降低機(jī)器人的能量消耗。在步態(tài)規(guī)劃的基礎(chǔ)上,運(yùn)動(dòng)控制是設(shè)計(jì)一個(gè)有效的控制器使得機(jī)器人達(dá)到預(yù)期的運(yùn)動(dòng)。國(guó)內(nèi)外學(xué)者提出了多種足式爬行機(jī)器人的步態(tài)規(guī)劃和運(yùn)動(dòng)控制策略。本文將這些控制策略分為三類:基于模型的控制策略、自適應(yīng)控制策略和仿生控制策略。
4.1 基于動(dòng)力學(xué)模型的控制技術(shù)
Loeffler[45]提出了一種3層架構(gòu)控制器,如圖12所示。上層基于3種基本的運(yùn)動(dòng)形式(站立、行走、小跑)規(guī)劃?rùn)C(jī)器人的運(yùn)動(dòng),這3種行走模式的最優(yōu)軌跡都是離線計(jì)算好的,可以在運(yùn)行時(shí)直接訪問;中層是建立在Pentium III芯片上的動(dòng)力學(xué)模型,通過來自傳感器的數(shù)據(jù)計(jì)算關(guān)節(jié)狀態(tài);底層采用PID控制器控制關(guān)節(jié)運(yùn)動(dòng)。

圖12 3層架構(gòu)控制器框圖
GO[46]同樣采用運(yùn)動(dòng)學(xué)模型控制六足機(jī)器人,列出約束條件求解機(jī)器人逆運(yùn)動(dòng)學(xué)。但是算法假設(shè)機(jī)體坐標(biāo)系始終與地面平行,不能用于非均勻地形。為了解決在線計(jì)算量大的問題,Loc[47]提出了一個(gè)基于三維幾何分析的算法,該算法使得機(jī)器人在執(zhí)行下一個(gè)步態(tài)時(shí)不需要進(jìn)行復(fù)雜的逆運(yùn)動(dòng)學(xué)計(jì)算就獲得穩(wěn)定的姿態(tài)空間,提高了機(jī)器人在復(fù)雜地形條件下的通行效果和效率,并基于MRWALLSPECT IV機(jī)器人進(jìn)行了仿真和實(shí)驗(yàn)驗(yàn)證,試驗(yàn)表明機(jī)器人能夠有效克服跨度是其腿長(zhǎng)70%的障礙。Satoshi[48]基于縱向加速軌跡算法(longitudinal acceleration trajectory,LAT)提出了LA-不連續(xù)對(duì)角步態(tài)并將其應(yīng)用于TITAN-XIII,實(shí)驗(yàn)表明機(jī)器人能夠保持動(dòng)態(tài)穩(wěn)定性。
文獻(xiàn)[49]中針對(duì)液壓驅(qū)動(dòng)機(jī)器人提出了一種結(jié)合剛度控制和阻尼控制的基于位置的阻抗控制方法。該方法可以有效地解決傳統(tǒng)位置/力控制中位置控制和力控制之間的切換導(dǎo)致關(guān)節(jié)電機(jī)速度快速變化的問題。基于六足機(jī)器人簡(jiǎn)化模型,文獻(xiàn)[50]中提出了一種包括位置PID閉環(huán)控制和姿態(tài)PID閉環(huán)控制的閉環(huán)控制策略。仿真和樣機(jī)實(shí)驗(yàn)結(jié)果表明,該六足機(jī)器人在非均勻地形下具有良好的適應(yīng)性。
由于機(jī)器人系統(tǒng)以及運(yùn)行環(huán)境越來越復(fù)雜,難以對(duì)機(jī)器人在其環(huán)境中的行為進(jìn)行準(zhǔn)確建模,控制器的參數(shù)需要在線更新,不利于進(jìn)行實(shí)時(shí)控制。
4.2 地形-步態(tài)自適應(yīng)控制技術(shù)
由于機(jī)器人的參數(shù)不能精確已知,且模型參數(shù)與實(shí)際系統(tǒng)參數(shù)不符將會(huì)產(chǎn)生伺服誤差。因此,采用自適應(yīng)控制方法,有望通過學(xué)習(xí)算法不斷更新模型參數(shù)以消除誤差提高控制精度。
Kirchner[51]基于六足機(jī)器人SIR ARTHUR,采用分層Q-學(xué)習(xí)法使得機(jī)器人能夠?qū)崿F(xiàn)目標(biāo)導(dǎo)向的行走行為。該自適應(yīng)算法具有三層學(xué)習(xí)性能:第一階段是基本動(dòng)作的學(xué)習(xí),如單腿的擺動(dòng)和站姿動(dòng)作,目標(biāo)是在狀態(tài)空間中盡可能地尋找和跟蹤最優(yōu)軌跡;第二層是按一定的時(shí)間序列激活基本動(dòng)作以執(zhí)行運(yùn)動(dòng)行為,如整個(gè)機(jī)器人的向前移動(dòng);第三層學(xué)習(xí)如何采用第二層的復(fù)雜行為實(shí)現(xiàn)給定環(huán)境和外部刺激下的目標(biāo)行為。控制原理如圖13所示。
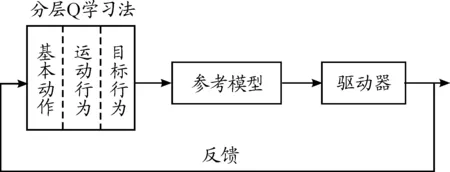
圖13 分層Q-學(xué)習(xí)法控制原理框圖
Elena[52]受到動(dòng)物在外力干擾后步態(tài)調(diào)整方式的啟發(fā),提出了一個(gè)能最大限度提高動(dòng)態(tài)能量穩(wěn)定裕度的步態(tài)參數(shù)適應(yīng)算法,并基于此算法設(shè)計(jì)了一個(gè)能夠補(bǔ)償穩(wěn)定性變化的自適應(yīng)控制器,從而使得機(jī)器人能夠在面對(duì)外力干擾時(shí)做出穩(wěn)定的反應(yīng),并將控制器應(yīng)用于其研發(fā)的SILO4,實(shí)驗(yàn)表明機(jī)器人的移動(dòng)速度提升了15%,對(duì)外力干擾的魯棒性提高了70%。Uluc[5]提出了一個(gè)多點(diǎn)碰撞模型用于表征RHex的翻轉(zhuǎn)運(yùn)動(dòng),并基于此運(yùn)動(dòng)模型設(shè)計(jì)了一個(gè)自適應(yīng)控制器。實(shí)驗(yàn)結(jié)果顯示,機(jī)器人在泥土、瀝青以及地毯上能夠成功實(shí)現(xiàn)傾覆后的自動(dòng)恢復(fù)。
4.3 仿生控制技術(shù)
仿生控制試圖將生物控制理論應(yīng)用于工程,通過模仿生物神經(jīng)系統(tǒng)建立數(shù)學(xué)模型或進(jìn)行工程模擬。中樞模式發(fā)生器(Central Pattern Generation,CPG)是生物控制和產(chǎn)生節(jié)律性運(yùn)動(dòng)的低級(jí)神經(jīng)中樞。Wilson[53]指出CPG的活動(dòng)既不依賴高級(jí)神經(jīng)中樞的指令也不需要感覺反饋就能使生物體做出適應(yīng)外界環(huán)境的活動(dòng)。
Bernhard[54]提出了一種基于生物應(yīng)激反應(yīng)的運(yùn)動(dòng)控制方法。CPG根據(jù)外界刺激把基本運(yùn)動(dòng)庫以及基本姿態(tài)庫中一種或幾種運(yùn)動(dòng)進(jìn)行組合,形成目標(biāo)運(yùn)動(dòng)模式。控制原理如圖14所示。機(jī)器人可以在沒有高級(jí)的運(yùn)動(dòng)規(guī)劃和復(fù)雜的外部傳感器的情況下穿越崎嶇陡峭的地形。

圖14 CPG控制原理框圖
Liu[55]將CPG用于四足機(jī)器人AIBO的運(yùn)動(dòng)控制,實(shí)現(xiàn)了機(jī)器人四種步態(tài)的平滑轉(zhuǎn)換。WANG[56]提出了一種由CPG和工作空間軌跡規(guī)劃器組成的四足機(jī)器人運(yùn)動(dòng)控制框架。利用CPG對(duì)不同步態(tài)產(chǎn)生不同的節(jié)律信號(hào),軌跡規(guī)劃器計(jì)算足部期望位置。這種運(yùn)動(dòng)控制框架兼具仿生控制和模型控制的優(yōu)勢(shì),仿真結(jié)果表明了該方法的實(shí)用性和簡(jiǎn)單性。Espinal[57]提出了一種尖峰神經(jīng)網(wǎng)絡(luò)(spiking neural network,SNN)用于控制四足機(jī)器人運(yùn)動(dòng)。SNN作為一種CPG可以通過配置突觸權(quán)重和拓?fù)浣Y(jié)構(gòu)等參數(shù)產(chǎn)生不同的運(yùn)動(dòng)模式,該系統(tǒng)已在兩個(gè)機(jī)器人平臺(tái)上進(jìn)行了實(shí)現(xiàn)和驗(yàn)證。同樣基于生物CPG,Liu[58]提出了一種由耦合振蕩器組成的對(duì)稱CPG結(jié)構(gòu),它可以生成穩(wěn)定、自然的步態(tài)模式。通過引入旋轉(zhuǎn)矩陣作為耦合項(xiàng),實(shí)現(xiàn)了平穩(wěn)快速的步態(tài)切換。此外,將機(jī)體姿態(tài)信息作為CPG網(wǎng)絡(luò)的反饋進(jìn)行傳輸,提高了系統(tǒng)在斜坡等不平坦地形中的適應(yīng)性。仿真和實(shí)物樣機(jī)試驗(yàn)結(jié)果驗(yàn)證了該控制策略的可行性。Szczencinski[59]基于昆蟲神經(jīng)系統(tǒng)自適應(yīng)控制,考慮到控制28自由度的MantisBot各關(guān)節(jié)需要大量計(jì)算,為機(jī)器人設(shè)計(jì)了四種基本反射行為。該機(jī)器人可以通過神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)產(chǎn)生的局部反射來實(shí)現(xiàn)機(jī)動(dòng),而無需進(jìn)行步態(tài)規(guī)劃或大量計(jì)算。Li[60]提出了一種采用通用內(nèi)部模型(General Internal Models,GIMs)的學(xué)習(xí)方法。采用GIMs,仿生機(jī)器人可以學(xué)習(xí)和模仿動(dòng)物運(yùn)動(dòng)。在蛇形機(jī)器人和魚形機(jī)器人上的實(shí)驗(yàn),驗(yàn)證了該方法的有效性。此外,Li指出GIM具有通用性,利用仿生神經(jīng)網(wǎng)絡(luò)可以學(xué)習(xí)任何類動(dòng)物的運(yùn)動(dòng)模式。
5 機(jī)器人感知技術(shù)
隨著視覺傳感器技術(shù)的發(fā)展進(jìn)步,足式移動(dòng)機(jī)器人能夠“看到”周圍環(huán)境,有利于提高復(fù)雜路面上的避障、越障能力。
X-RHex[9]擁有良好的負(fù)載能力,能夠搭載諸如GPS、激光雷達(dá)、網(wǎng)絡(luò)攝像頭、無線適配器等模塊,具備在野外山地和室內(nèi)樓梯間環(huán)境下對(duì)目標(biāo)位置實(shí)現(xiàn)自主導(dǎo)航的能力,在軍事偵察和城市搜救方面具有很大的實(shí)用價(jià)值。Scorpio[24]利用慣性測(cè)量單元能夠在跌倒后自主恢復(fù)到站立步態(tài)并且能夠通過感知地形選擇合適的形態(tài)和運(yùn)動(dòng)方式。MANTIS[27]各條支腿的末端都搭載了豐富的傳感器,頭部搭載了立體攝像系統(tǒng)、慣性測(cè)量單元以及激光雷達(dá)傳感器,機(jī)器人能夠全方位地獲取自身運(yùn)動(dòng)以及環(huán)境數(shù)據(jù)。
紅外線、激光或超聲波傳感器常用于測(cè)量距離數(shù)據(jù)以識(shí)別路況,劉宇飛等[61]在用于月球探測(cè)的六足機(jī)器人上搭載激光測(cè)距儀,如圖15(a)所示,基于測(cè)量信息對(duì)環(huán)境地形建模,進(jìn)而規(guī)劃運(yùn)動(dòng)軌跡實(shí)現(xiàn)自主避障。但是這種通過接受光信號(hào)或聲音信號(hào)用于數(shù)字計(jì)算的方法容易受到周圍環(huán)境的干擾不利于精確建模,進(jìn)而限制機(jī)器人的移動(dòng)能力。
另一種方案則是采用視覺傳感器,通過處理攝像機(jī)捕捉到的圖像數(shù)據(jù),將其解釋為機(jī)器人路徑規(guī)劃的有用信息。Acevedo[62]提出了一個(gè)新型的采用靜態(tài)單目攝影機(jī)的全方位360度視覺系統(tǒng)來導(dǎo)航機(jī)器人移動(dòng)。該系統(tǒng)由單目靜態(tài)攝像機(jī)、凹面反射面和處理器單元以及機(jī)器人本體組成,如圖15(b)所示。攝像機(jī)通過仰視凹面反射面的焦點(diǎn)可以360°全方位地觀察機(jī)器人周圍的環(huán)境。使用處理器單元進(jìn)行圖像處理,形成以機(jī)器人為中心的模擬環(huán)境。

圖15 視覺傳感器在機(jī)器人上的應(yīng)用效果圖
另一方面,雙目視覺能夠獲得三維的場(chǎng)景信息,能夠更好地感知環(huán)境。對(duì)此,宋海濤等[63]提出了一種雙目立體視覺系統(tǒng),通過引入尺度不變特性變換算法有效地解決了雙目視覺的立體匹配問題。實(shí)驗(yàn)結(jié)果表明,搭載了該系統(tǒng)的移動(dòng)機(jī)器人能夠完成自動(dòng)入庫任務(wù)。
隨著傳感技術(shù)的發(fā)展進(jìn)步,多足移動(dòng)機(jī)器人實(shí)現(xiàn)了從模仿爬行動(dòng)物的簡(jiǎn)單移動(dòng)到擁有外界環(huán)境感知力和智能運(yùn)動(dòng)控制的跨越式發(fā)展。
6 足式爬行機(jī)器人發(fā)展趨勢(shì)
在國(guó)內(nèi)外學(xué)者的研究探索下,足式爬行機(jī)器人在機(jī)構(gòu)設(shè)計(jì)與運(yùn)動(dòng)控制等方面都取得了長(zhǎng)足的進(jìn)展。足式爬行機(jī)器人已經(jīng)能夠?qū)崿F(xiàn)在復(fù)雜地形上穩(wěn)定行走,但機(jī)動(dòng)性和靈活性遠(yuǎn)不如足式爬行生物,存在移動(dòng)速度低,能量效率低等問題。結(jié)合以上對(duì)該領(lǐng)域研究成果的總結(jié),本文預(yù)測(cè)未來足式爬行機(jī)器人的研究和發(fā)展將針對(duì)以下幾個(gè)方面展開。
1) 運(yùn)動(dòng)機(jī)理仿生化。目前已經(jīng)有很多學(xué)者研制了多種仿生足式爬行機(jī)器人,但是存在模型建立不夠精確的問題。一方面,對(duì)足式爬行生物生理結(jié)構(gòu)的深入揭示將給足式爬行機(jī)器人機(jī)構(gòu)設(shè)計(jì)帶來新的啟發(fā)。另一方面,從爬行昆蟲的運(yùn)動(dòng)控制中汲取靈感,在現(xiàn)有研究基礎(chǔ)上進(jìn)一步探索生物神經(jīng)控制系統(tǒng)提高足式爬行機(jī)器人的運(yùn)動(dòng)精度和靈活性。
2) 能量利用高效化。搭載大容量的電池在提高機(jī)器人運(yùn)行時(shí)間的同時(shí)降低了能量利用效率,因?yàn)轭~外的電池增加了機(jī)器人的負(fù)載。Aarom[64]通過調(diào)整機(jī)器人靜止站立時(shí)機(jī)體的姿態(tài)優(yōu)化了腿部關(guān)節(jié)的輸出轉(zhuǎn)矩,顯著減小了站立姿態(tài)驅(qū)動(dòng)器的輸出功率。Hirone[65]通過優(yōu)化機(jī)器人步長(zhǎng)、跨寬、機(jī)體仰角、運(yùn)動(dòng)速度和足端輸出力5個(gè)參數(shù),有效地提高了機(jī)器人的能量效率。如何協(xié)調(diào)運(yùn)動(dòng)性能和能量損耗提高能量利用率是足式爬行機(jī)器人的發(fā)展趨勢(shì)之一。
3) 結(jié)構(gòu)材料新型化。新型材料的運(yùn)用能進(jìn)一步提高機(jī)器人的運(yùn)動(dòng)性能。例如,TITAN-XIII[10]采用超高分子量聚乙烯纖維制成的絞線在保證傳動(dòng)性能的前提下減輕了整機(jī)質(zhì)量,有效地提高了機(jī)器人的比功率;X-RHex[5]機(jī)體框架使用表面覆蓋碳纖維的鋁板,在減輕質(zhì)量的同時(shí)增加了框架剛度,機(jī)體更加輕巧堅(jiān)固;德國(guó)人工智能中心在2016年研制的MANTIS[27]機(jī)身結(jié)構(gòu)是由鑄鋁部件和用碳纖維加固的塑料管組成的。足式爬行機(jī)器人的結(jié)構(gòu)材料將采用新型材料而不是鋼材、塑料等傳統(tǒng)材料,從而提高能量利用效率、增強(qiáng)環(huán)境適應(yīng)性。
4)運(yùn)動(dòng)模式復(fù)合化。例如,TITAN-X[17]集履帶、腿足于一體在復(fù)雜地形上有很強(qiáng)的通過性;Quattroped[18]采用結(jié)構(gòu)可變的輪腿機(jī)構(gòu)兼具輪式機(jī)器人的移動(dòng)速度和足式機(jī)器人越障能力。多種運(yùn)動(dòng)模式的有效結(jié)合將全方位地提高機(jī)器人的運(yùn)動(dòng)能力。
5)感知技術(shù)多模化。視覺傳感器和SLAM技術(shù)[66-67]的發(fā)展讓機(jī)器人擁有“眼睛”成為現(xiàn)實(shí)。觸覺可以提高機(jī)器人對(duì)外界的認(rèn)知,增強(qiáng)對(duì)外界的交互性。現(xiàn)階段機(jī)器人觸覺的發(fā)展主要分為觸覺傳感器[68-70]和新型電子皮膚觸覺傳感器陣列[71-73]的研制,由于制作工藝、成本和能耗的問題尚未大面積應(yīng)用于實(shí)踐[74]。嗅覺[75]可以讓機(jī)器人應(yīng)用于災(zāi)害搜救、污染物排查等特殊領(lǐng)域[76-77]。多感官感知技術(shù)的融合或是足式爬行機(jī)器人智能化發(fā)展的方向。
7 結(jié)論
本文首先對(duì)近十年足式爬行機(jī)器人研究成果進(jìn)行綜述,分非仿生和仿生兩類介紹若干足式爬行機(jī)器人結(jié)構(gòu)與性能特點(diǎn),并總結(jié)歸納了該領(lǐng)域的關(guān)鍵技術(shù):機(jī)器人機(jī)構(gòu)的創(chuàng)新設(shè)計(jì),穩(wěn)定性標(biāo)定技術(shù),爬行步態(tài)規(guī)劃與運(yùn)動(dòng)控制以及視覺感知技術(shù)。隨著該領(lǐng)域加入了越來越多的科研團(tuán)隊(duì),足式爬行機(jī)器人的發(fā)展也是日新月異,未來的足式爬行機(jī)器人將實(shí)現(xiàn)運(yùn)動(dòng)機(jī)理仿生化、能量利用高效化、結(jié)構(gòu)材料新型化、運(yùn)動(dòng)模式復(fù)合化和感知技術(shù)多模化。
