電動汽車用異步電機參數辨識及優化
2014-08-08 03:17:08李強
電機與控制應用 2014年6期
李 強
(中國衛星海上測控部,江蘇 江陰 214400)
0 引 言
隨著汽車工業的發展以及世界各國汽車保有量的持續增加,能源危機和環境污染等問題日益突出。電動汽車在一定程度可以緩解傳統燃油汽車帶來的危害。電池、電機及電機控制器是電動汽車的三大關鍵技術[1]。異步電機因其費用低、可靠性高、轉矩波動小和噪聲小被廣泛應用于電動汽車驅動系統[2]。良好的電機驅動控制技術在很大程度上影響著電動汽車的運動性能,常用的異步電機控制方法有V/f控制、轉差頻率控制、直接轉矩控制、空間矢量控制等。空間矢量控制技術通過旋轉坐標變換將強耦合的交流電機等效為直流電機,可以獲得與直流電機相同的控制特性,因而在電動汽車驅動電機控制技術中獲得了廣泛應用。空間矢量控制必須依賴電機參數完成磁場定向以及磁鏈的計算,如果電機參數精確度不高,將會使矢量控制喪失優勢,造成系統動態和穩態性下降,甚至產生振蕩[3]。因此,如何精確辨識電機參數是實現矢量控制的首要問題。
本文研究了電動汽車用異步電機的矢量控制基本原理,分析了基于轉子磁場定向矢量控制系統對電機參數的依賴性及參數對整個控制系統的影響,提出了一種異步電機離線參數辨識改進算法。在文獻[5]的基礎上對電機參數進行初步辨識,通過給電機注入帶有幅值偏量的正弦信號優化電機轉子電阻Rr,通過給電機注入階躍激勵信號優化轉子時間常數Tr。最后,在7.5kW異步電機上進行了離線參數辨識,驗證了本文所提算法。
1 電動汽車用異步電機基本控制原理
基于轉子磁場定向的異步電機矢量控制原理如圖1所示。通過轉子磁場定向可以將定子電流分解為建立轉子磁場的純勵磁分量iM和平衡轉子電流的純轉矩分量iT,并實現對純勵磁分量iM和純轉矩分量iT的解耦,通過對定子電流兩個分量iM、iT的控制實現異步電機的矢量控制。在電動汽車用異步電機矢量控制系統中,通過“油門踏板”控制轉矩電流,從而控制電機電磁轉矩,進而控制電機的轉速,實現電動汽車的加速、減速行駛。
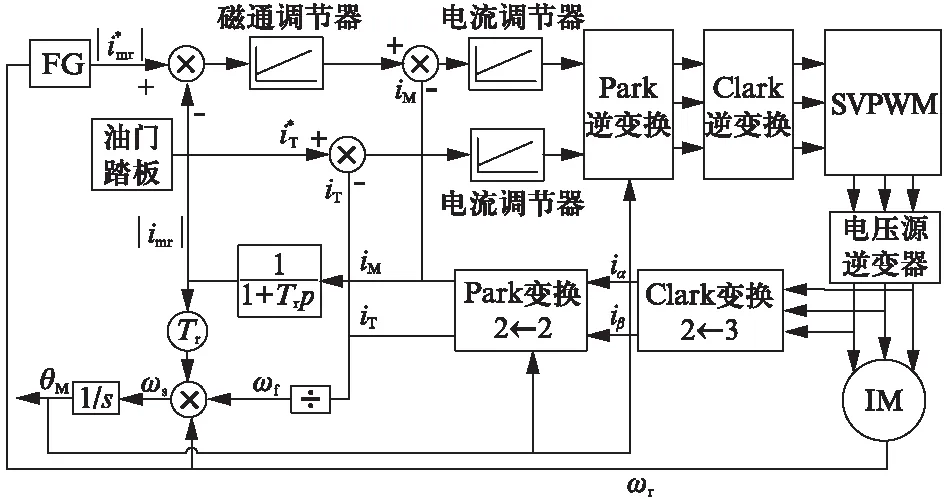
圖1 基于轉子磁場定向的異步電機矢量控制原理
在轉子磁場定向的過程中,必須知道電機的轉子電阻Rr、轉子時間常數Tr和互感Lm。轉子電阻Rr、轉子時間常數Tr是對系統影響最大、最關鍵的參數。如果電機參數與實際值不符,不僅會使矢量控制系統喪失優勢,還會對系統的穩態和動態性能產生嚴重影響,將會使電機過激勵,引起磁路飽和、功率因數下降、耗損增大、溫升變高,還會使系統產生振蕩。電動汽車在正常行駛的過程中,要求其驅動電機變頻調速范圍寬,因此獲得準確的電機參數尤為關鍵。
2 異步電機參數初步辨識
2.1 異步電機等效電路
根據文獻[4],可得異步電機的T型等效電路,如圖2(a)所示。可將T型等效電路轉換成IΓ型等效電路,如圖2(b)所示。

圖2 異步電機等效電路
T型等效電路和IΓ型等效電路之間的關系是[4]
(1)
(2)
(3)
式中:Lr=Lm+Lsr。
2.2 轉子電阻Rr、互感Lm、轉子漏感Lσr辨識
Gastli提出了通過向電機注入單相正弦信號來獲得電機參數的方法,并分析了分別在兩種不同頻率的單相正弦信號激勵下,用IΓ型等效電路辨識的電機參數精度比T型等效電路高。基于該研究,本文提出了異步電機轉子電阻Rr、互感Lm、轉子漏感Lσr辨識的實現方法和步驟。
(4)
(5)
(6)
式中:R2eq=Req-Rs,Rs為定子電阻。根據文獻[6]所提算法,通過給電機注入單相直流激勵信號辨識定子電阻Rs。
(7)
(8)
(9)
(10)
3 轉子電阻Rr及轉子時間常數Tr優化
3.1 轉子電阻Rr優化
在異步電機矢量控制系統中,將定子三相電流通過坐標變換轉換到靜止的αβ坐標系中,利用矢量控制系統,向電機α軸通入帶有幅值偏量的正弦信號,使電機的α相和β相電流滿足式(11)。異步電機α相等效電路,如圖3所示。
iαs=I0+Mhsin(ωht)
iβs=0
(11)
式中:I0——額定電流;
Mh——取額定電流的一半。
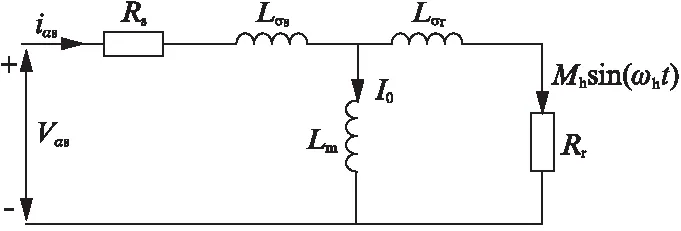
圖3 異步電機d相等效電路
當頻率ωh足夠大時,直流分量I0流過Lm,正弦分量Mhsin(ωht)通過Rr。頻率ωh可由式(12)確定。
(12)
則有
(13)
式中,Lm、Lσr、Rr的值可由式(7)~式(9)獲得。由圖3可知
Rra(Mhsinωht)
(14)
化簡式(14),并考慮到Lσs=Lσr,則有
Vαs-Rsiαs=(Rs+Rra)Mhsinωht+
2LσsωhMhcosωht=
AMhsin(ωht+αh)
(15)

由上式可得轉子電阻的優化值Rra為
Rra=2Lσsωhcotαh-Rs
(16)
式中,αh為Vαs-Rsiαs和Mhsin(ωht+αh)的相位差,可以通過AD采樣和FFT變換獲得。
3.2 轉子時間常數Tr優化
在兩相靜止αβ坐標系下,異步電機數學模型為[7]
(17)
在電機控制逆變電路中,給電機定子注入單相階躍信號,電機處于堵轉狀態,電機內部不產生旋轉磁場,即電機的轉速ωr為0,并注意到異步電機內部的轉子繞組是短接的,urα和urβ為0,則式(17)可等效為
(18)
考慮到電機的定子電流瞬態過程很短,因此可以忽略與電機定子電流相關的微分項,根據式(18)有
(19)
(20)
由式(19)、式(20)可得
(21)
根據式(21)可得,在αβ坐標系中,定子α相電壓usα在單相階躍信號激勵下按指數規律衰減,衰減的時間常數是轉子時間常數。式中,Rs、Lm為初步辨識值,usα、isα可通過測量獲得,k是與電機有關的常數。因此,根據usα的衰減規律即可確定轉子時間常數Tr。
4 試驗研究
4.1 轉子電阻Rr、互感Lm、轉子漏感Lσr初步辨識
為驗證本文所提方法的有效性,對7.5kW交流異步電機參數進行辨識。異步電機控制系統框圖如圖4所示。主控芯片選擇TI公司DSPTMS320F-2812,IGBT開關頻率為2kHz,死區時間為4.6μs,定子側直流電壓Udc為72V。
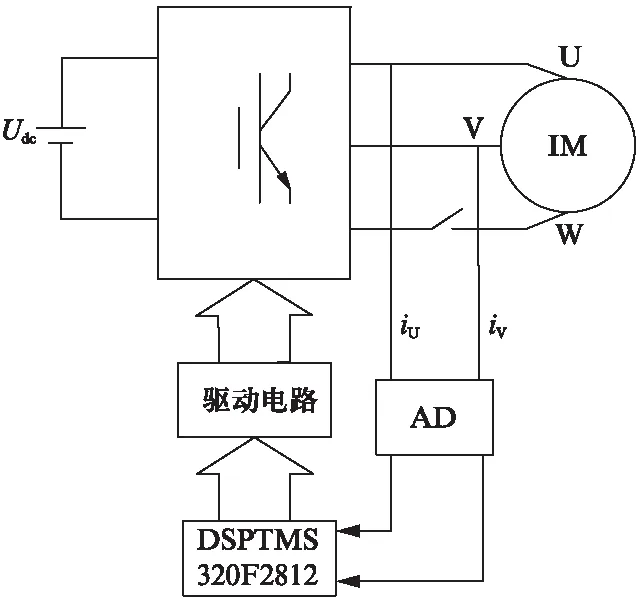
圖4 異步電機控制系統框圖
圖4中,U、V相導通,W相斷開,可得到H橋式電機控制原理電路,如圖5所示。在H橋式控制原理的基礎上,采用SPWM調制方法生成正弦信號。在正弦信號正半周期時,V相保持Sb-始終處于導通狀態,對U相進行SPWM調制;在正弦信號的負半周期時,V相則保持Sb+始終處于導通狀態,對U相進行SPWM調制。W相一直處于斷開狀態。這樣就等效向電機注入單相正弦激勵信號。電流采樣方式選擇周期中斷觸發采樣,采樣周期為167μs。
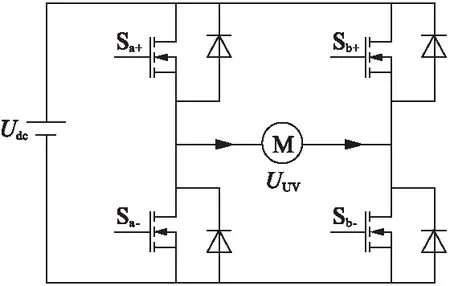
圖5 電機H橋式控制原理電路
通過調整載波比可得到不同頻率的正弦信號。圖5中,通過H橋電路給電機注入頻率分別為25Hz和50Hz的正弦電流激勵信號,在這兩種正弦信號的激勵下,通過分析其電壓、電流幅值及功率因數,根據式(7)~式(10)可獲得電機的基本參數。
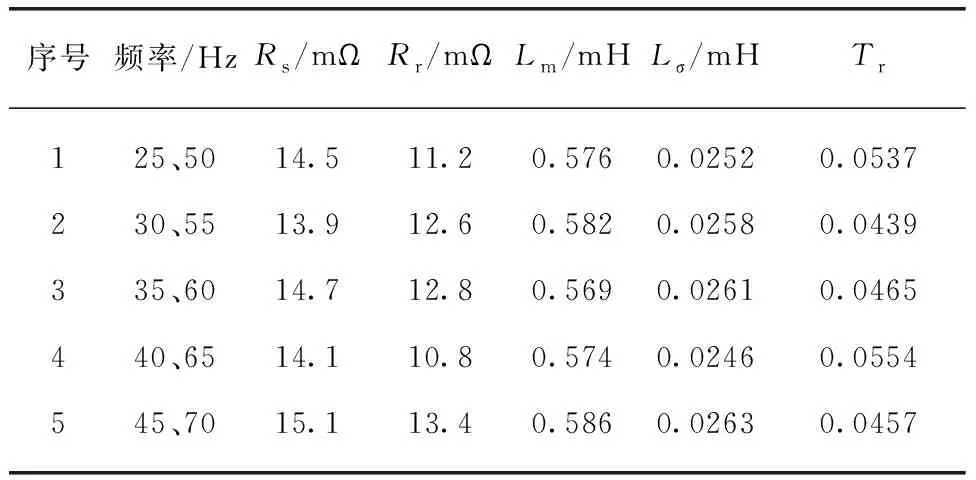
表1 電機參數初步辨識結果
由表1可看出,轉子電阻和轉子時間常數的誤差比較大,分別為12.4%和15.4%。而這兩個參數對電機空間矢量控制系統影響最大,因此需要對其進行優化和修正。
4.2 轉子電阻Rr修正
本文所選7.5kW異步電機額定電流為 80A。根據式(11),可取I0=80A,Mh=40A。根據式(13)及表1的第一組試驗數據計算可得ωh的最小值為61.3Hz,因此取ωh=65Hz。在異步電機矢量控制系統中,控制α相和β相電流滿足式(22)。注入電機的正弦激勵信號如圖6所示。
iαs=80+40sin(50t)
iβs=0
(22)
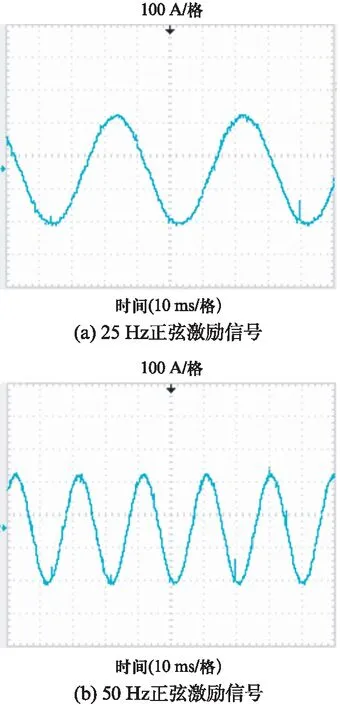
圖6 注入電機的正弦激勵信號
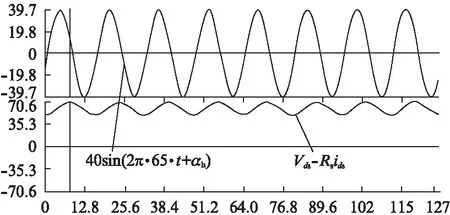
圖7 Vds-Rsids和Mhsin(ωht+αh)相位差
通過AD采樣和FFT變換可獲得兩種信號的相位差,如圖7所示。根據式(16)即可獲得轉子電阻修正值為11.3mΩ。當ωh分別取70、75、80、85Hz 時,可以得到多組試驗結果,如圖8所示。可看出修正后的轉子電阻曲線更逼近真值。
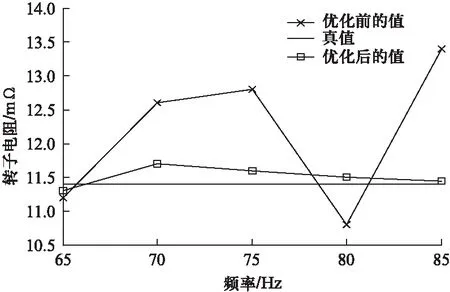
圖8 轉子電阻優化前后比較
4.3 轉子時間常數修正
在兩相靜止的αβ坐標系中,在t=0.3s時,向電機α相注入幅值為-10A的直流階躍信號,控制電機迅速進入穩定狀態,電機電壓呈指數規律衰減,電壓衰減的時間常數即為電機轉子時間常數。電機定子電壓衰減變化曲線如圖9所示,電壓衰減的指數時間為0.049s,即電機轉子時間常數為0.049。
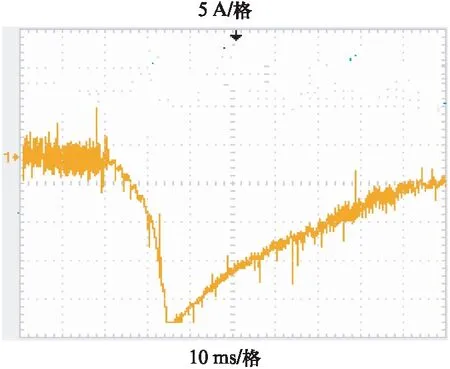
圖9 電機定子電壓衰減變化曲線
多次試驗可以獲得多組試驗結果。轉子時間常數優化前后的比較如圖10所示,可以看出修正后的轉子時間常數更接近電機的真值。
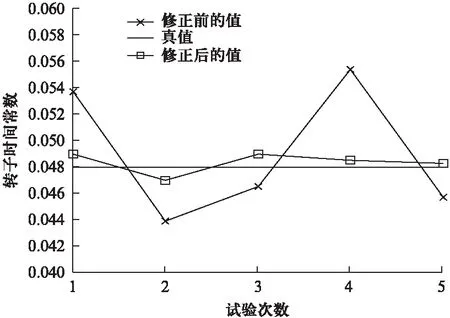
圖10 轉子時間常數優化前后的比較
5 結 語
本文對電動汽車用異步電機矢量控制系統進行研究,分析了電機參數對整個控制系統的影響,提出了一種異步電機離線參數初步辨識及優化修正算法。該算法對電機參數進行初步辨識,并在矢量控制系統中通過給電機注入不同的激勵信號對電機轉子電阻Rr和轉子時間常數Tr進行優化修正。最后在7.5kW電機上試驗,驗證了本文所提算法。參數辨識及優化過程簡單易實現、精度高,滿足矢量控制的要求,尤其可以滿足電機大范圍變頻調速控制,適用于電動汽車用異步電機參數辨識。
【參考文獻】
[1] 崔勝民.現代汽車系統控制技術[M].北京: 北京大學出版社,2008.
[2] ZERAOULIA M, BENBOUZID M E H, DIALLO D. Electric motor drive selection issues for HEV propulsion systems: a comparative study[J]. IEEE Transactions on Vehicular Technology, 2006,55(6): 1756-1764.
[3] 王成元,夏加寬,孫宜標.現代電機控制技術[M].北京: 機械工業出版社,2008.
[4] SLEMON G R . Modeling of induction machines for electric drives[J]. Industry Applications, IEEE Transactions, 1989,25(6): 1126-1131.
[5] GASTLI A. Identification of induction motor equiva-lent circuit parameters using the single-phase test [J]. Energy Conversion, IEEE Transactions, 1999,14(1): 51-56.
[6] 賀艷暉,王躍,王兆安.異步電機參數離線辨識改進算法[J].電工技術學報,2011(6): 77-84.
[7] 閻治安,崔新藝,蘇少平.電機學[M].西安: 西安交通大學出版社,2006.
