基于粒子群算法的CFB機(jī)組協(xié)調(diào)系統(tǒng)模型辨識(shí)
2020-10-09 02:55:16白建云
自動(dòng)化與儀表 2020年9期
白建云,邵 茹
(山西大學(xué) 自動(dòng)化與軟件學(xué)院,太原030013)
隨著新能源發(fā)電在電網(wǎng)占比的逐年增加,火力發(fā)電的地位因此面臨著變化,由之前提供電能的主體性電源向提供可靠電力和輔助電網(wǎng)調(diào)峰調(diào)頻的基礎(chǔ)性電源轉(zhuǎn)變。由于供給側(cè)跟需求側(cè)雙側(cè)均具有間歇性,電網(wǎng)日負(fù)荷高峰與低谷差增大,這就對火電機(jī)組提出了調(diào)峰調(diào)頻的要求,以維持電網(wǎng)的穩(wěn)定。機(jī)組在AGC/ACE 模式下,電網(wǎng)通過Kp 值對機(jī)組進(jìn)行考核并作出相應(yīng)的補(bǔ)償,這就需要火電機(jī)組擁有快速的負(fù)荷響應(yīng)速度和控制效果,從而獲得更高的經(jīng)濟(jì)效益[1]。
機(jī)爐協(xié)調(diào)控制系統(tǒng)是機(jī)組AGC 模式下的核心,其通過鍋爐主控跟汽輪機(jī)主控,使鍋爐跟汽輪機(jī)的動(dòng)態(tài)特性與負(fù)荷要求相匹配,鍋爐確定相應(yīng)的給煤量、給水量、一次風(fēng)量、二次風(fēng)量,汽輪機(jī)高壓缸進(jìn)汽調(diào)門開度產(chǎn)生相應(yīng)的變化,共同滿足電網(wǎng)對機(jī)組負(fù)荷的需求。對多輸入多輸出系統(tǒng)進(jìn)行模型辨識(shí)的傳統(tǒng)方法是系統(tǒng)在開環(huán)狀態(tài)下,將階躍擾動(dòng)加在其中一個(gè)調(diào)節(jié)量上,通過觀察每個(gè)被控量產(chǎn)生的變化從而得到該調(diào)節(jié)量到每個(gè)被控量通道的傳遞函數(shù)[2]。這種方法對現(xiàn)場條件有很高的要求,不易于實(shí)施。本文采用標(biāo)準(zhǔn)粒子群智能算法對某電廠超臨界350 MW 循環(huán)流化床機(jī)組協(xié)調(diào)系統(tǒng)進(jìn)行閉環(huán)辨識(shí),并且證實(shí)了該算法建模的可行性。
1 協(xié)調(diào)控制系統(tǒng)介紹
1.1 被控對象介紹
在協(xié)調(diào)控制系統(tǒng)中,有功功率是機(jī)組的外部參數(shù),對其要求是能夠盡快與電網(wǎng)調(diào)度指令相一致。主蒸汽壓力是機(jī)組的內(nèi)部參數(shù),衡量著鍋爐側(cè)產(chǎn)生合格的蒸汽量與進(jìn)入汽輪機(jī)做功的蒸汽量之間是否平衡及機(jī)組的蓄熱能力。對主蒸汽壓力的要求是當(dāng)機(jī)組負(fù)荷穩(wěn)定時(shí),主蒸汽壓力也保持穩(wěn)定;當(dāng)機(jī)組負(fù)荷跟蹤目標(biāo)負(fù)荷時(shí),主蒸汽壓力在給定值附近允許的范圍內(nèi)波動(dòng)[3]。
單元機(jī)組協(xié)調(diào)控制系統(tǒng)是很具有代表性的多變量系統(tǒng)。其中,總給煤量u1和汽輪機(jī)高調(diào)門開度u2分別是系統(tǒng)的兩個(gè)輸入,有功功率y1與主蒸汽壓力y2分別是系統(tǒng)的兩個(gè)輸出。被控對象的系統(tǒng)結(jié)構(gòu)如圖1所示。
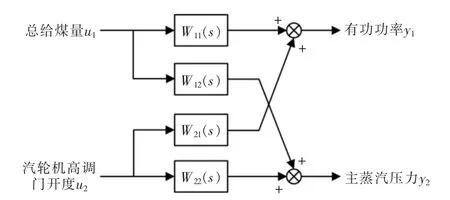
圖1 協(xié)調(diào)控制系統(tǒng)結(jié)構(gòu)Fig.1 Coordination control system structure
該系統(tǒng)可用式(1)所示的傳遞函數(shù)矩陣來表示:

1.2 被控對象動(dòng)態(tài)特性
鍋爐燃料量μB、汽輪機(jī)高調(diào)門開度μT階躍擾動(dòng)下協(xié)調(diào)控制系統(tǒng)被控對象的動(dòng)態(tài)特性如圖2所示。
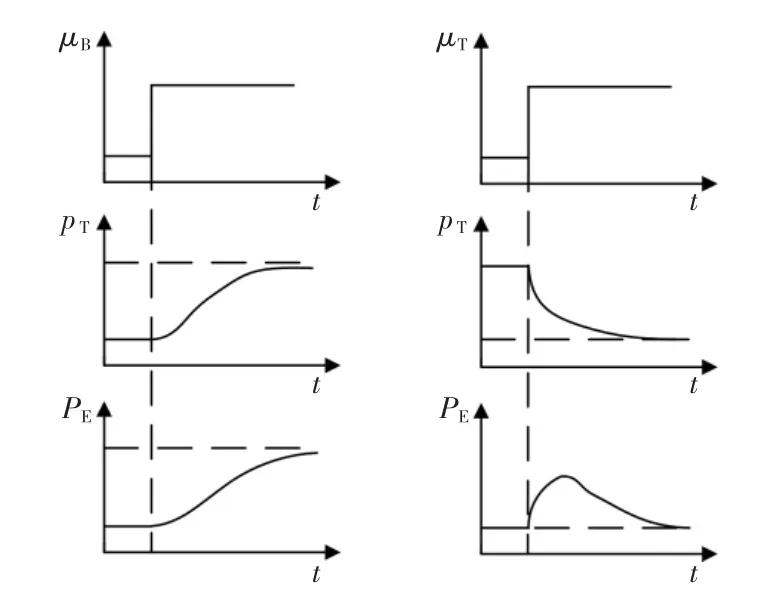
圖2 協(xié)調(diào)控制系統(tǒng)被控對象的動(dòng)態(tài)特性Fig.2 Dynamic characteristics of controlled object of coordinated control system
1.2.1 鍋爐燃料量階躍擾動(dòng)下的動(dòng)態(tài)特性
當(dāng)給煤量階躍增加時(shí),布置在爐膛與尾部煙道的受熱面吸收的熱量增加,主蒸汽壓力經(jīng)過一定時(shí)間的遲延之后逐漸升高[4-6]。由于汽輪機(jī)高壓缸進(jìn)汽調(diào)門開度保持不變,蒸汽流量因此增加,帶來有功功率增加的同時(shí)限制主蒸汽壓力的繼續(xù)提高。當(dāng)蒸汽流量與給煤量達(dá)到動(dòng)態(tài)平衡時(shí),主蒸汽壓力與機(jī)組實(shí)發(fā)功率穩(wěn)定在較高水平。
1.2.2 汽輪機(jī)高調(diào)門開度擾動(dòng)下的動(dòng)態(tài)特性
當(dāng)汽輪機(jī)高調(diào)門開度階躍增加時(shí),蒸汽流量立刻增加,從而帶來機(jī)組出力的增加,與此同時(shí)主蒸汽壓力立刻下降。由于燃料量并未增加,因而蒸發(fā)量保持不變,機(jī)組出力增加的原因是釋放出來的一部分鍋爐蓄熱。最終,主蒸汽壓力將穩(wěn)定在一個(gè)較低水平,實(shí)發(fā)功率也會(huì)恢復(fù)到汽輪機(jī)進(jìn)汽調(diào)門開度擾動(dòng)之前的數(shù)值。
根據(jù)對系統(tǒng)被控對象動(dòng)態(tài)特性的分析,可以看出從燃料量改變到主蒸汽壓力和機(jī)組實(shí)發(fā)功率變化的過程響應(yīng)時(shí)間均很慢;但是當(dāng)汽輪機(jī)高調(diào)門開度變化時(shí),主蒸汽壓力跟機(jī)組實(shí)發(fā)功率的變化是很快的。因此,當(dāng)機(jī)組負(fù)荷跟隨AGC 指令變化時(shí),如果僅僅依靠鍋爐側(cè)通過調(diào)節(jié)給煤量來調(diào)節(jié)有功功率的話,就不能獲得快速的負(fù)荷響應(yīng)速度。相反,如果僅僅依靠汽輪機(jī)側(cè)通過調(diào)節(jié)高調(diào)門開度來調(diào)節(jié)有功功率的話,雖然負(fù)荷響應(yīng)速度很快,但是由于鍋爐側(cè)燃料量的增加不能及時(shí)帶來蒸發(fā)量的變化,會(huì)造成主蒸汽壓力產(chǎn)生較大程度的波動(dòng)。因此,在負(fù)荷變化時(shí),可以通過適當(dāng)?shù)恼{(diào)節(jié)汽輪機(jī)高調(diào)門開度,提高負(fù)荷響應(yīng)速度。同時(shí),鍋爐側(cè)通過改變給煤量滿足負(fù)荷的變化,使鍋爐側(cè)跟汽輪機(jī)側(cè)能量供需相匹配。當(dāng)鍋爐側(cè)控制器入口檢測到主蒸汽壓力偏差過大,就會(huì)向汽輪機(jī)側(cè)控制器發(fā)出指令,限制高調(diào)門的進(jìn)一步開大,保證機(jī)組安全運(yùn)行。這就是機(jī)組協(xié)調(diào)控制的根本原則。
2 機(jī)爐協(xié)調(diào)控制系統(tǒng)模型辨識(shí)
2.1 粒子群算法原理介紹
基本粒子群算法中粒子速度更新公式為

式中:i=1,2,…,m;j=1,2,…,N;t 為當(dāng)前位置時(shí)刻;t+Δt 為下一時(shí)刻;r1(r2)=rand(0,1);c1,c2為粒子向自身最優(yōu)值與全局最優(yōu)值靠近的權(quán)值。
標(biāo)準(zhǔn)粒子群算法中粒子速度更新公式是在式(2)的基礎(chǔ)上引入慣性權(quán)重ω,即:

慣性權(quán)重ω 代表著粒子當(dāng)前時(shí)刻的速度在下一時(shí)刻所占的比例[7]。ω 值較大,代表著全局搜索能力較強(qiáng);ω 值較小,代表著局部搜索能力較強(qiáng)。因此,一般采用慣性權(quán)重遞減的策略,起初選取較大的ω值,以增強(qiáng)搜索速度,后期起初選取較小的ω 值,有利于算法的收斂[8]。
慣性權(quán)重遞減公式為

式中:ωmin,ωmax是慣性權(quán)重的最小與最大值;Tmax為迭代次數(shù);t 為當(dāng)前已走過的步數(shù)。
標(biāo)準(zhǔn)PSO 算法流程如圖3所示。
2.2 系統(tǒng)辨識(shí)原理
對MIMO 系統(tǒng)進(jìn)行辨識(shí)跟SISO 系統(tǒng)辨識(shí)的實(shí)質(zhì)相同,辨識(shí)方法都是依據(jù)電廠運(yùn)行過程中系統(tǒng)的輸入輸出數(shù)據(jù),尋找目標(biāo)函數(shù)達(dá)到最小值時(shí)所對應(yīng)的數(shù)學(xué)模型,此時(shí)數(shù)學(xué)模型與系統(tǒng)特性等價(jià)[9-10]。
對于圖4 有r 個(gè)輸入q 個(gè)輸出的MIMO 系統(tǒng),就需要建立r×q 個(gè)傳遞函數(shù)表達(dá)r 個(gè)輸入與q 個(gè)輸出之間的對應(yīng)關(guān)系[11-12]。對機(jī)組協(xié)調(diào)系統(tǒng)進(jìn)行模型辨識(shí)的關(guān)鍵在于辨識(shí)出兩輸入兩輸出系統(tǒng)的W11(s)、W12(s)、W21(s)和W22(s)這4 個(gè)傳遞函數(shù)。
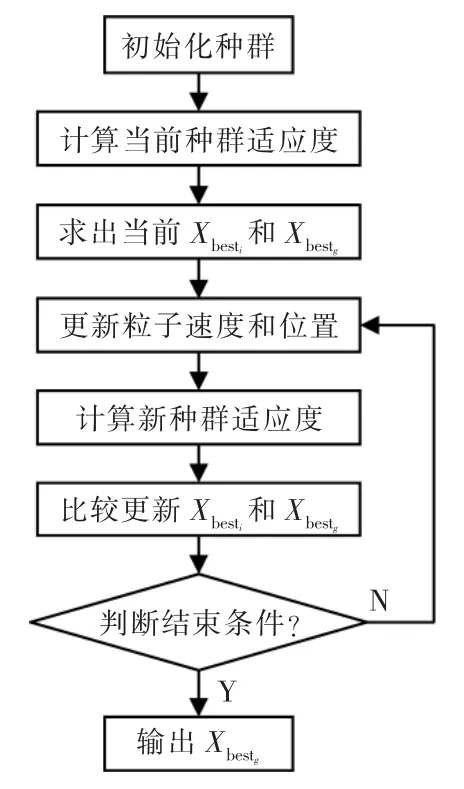
圖3 標(biāo)準(zhǔn)PSO 算法流程Fig.3 Flow chart of standard PSO algorithm
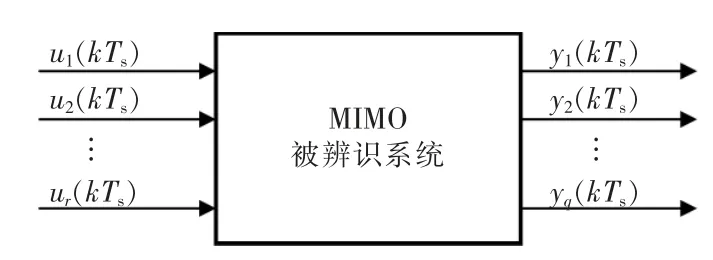
圖4 r 個(gè)輸入q 個(gè)輸出的MIMO 系統(tǒng)Fig.4 MIMO system with r inputs and q outputs
對MIMO 系統(tǒng)進(jìn)行模型辨識(shí)時(shí),選取目標(biāo)函數(shù)為

式中:q 為輸出變量個(gè)數(shù);m 為采樣點(diǎn)數(shù);Ts為采樣周期;γl為各個(gè)輸出在目標(biāo)函數(shù)中所占的比例,它是為了平衡每個(gè)輸出在目標(biāo)函數(shù)中所占的比例。
然而,大多數(shù)情況下,各輸出的幅值相差較大,并不在同一個(gè)數(shù)量級(jí)上,很難確定合適的γl[13]。這時(shí)就需要對每個(gè)輸出分別進(jìn)行辨識(shí),此時(shí)選取目標(biāo)函數(shù)為

系統(tǒng)辨識(shí)的方法是根據(jù)采集到的輸入輸出數(shù)據(jù),運(yùn)用辨識(shí)方法對參數(shù)進(jìn)行尋優(yōu),確定一種跟實(shí)際系統(tǒng)特性一致的模型[14]。首先根據(jù)系統(tǒng)的動(dòng)態(tài)特性,選擇適合的估計(jì)模型,接下來將輸入分別施加到待辨識(shí)系統(tǒng)跟估計(jì)模型上,計(jì)算得到兩個(gè)輸出的差值,優(yōu)化算法根據(jù)差值對估計(jì)模型參數(shù)進(jìn)行優(yōu)化,待辨識(shí)系統(tǒng)跟估計(jì)模型的輸出差達(dá)到最小時(shí),表明估計(jì)模型能最好地接近實(shí)際過程的輸出,此時(shí)的估計(jì)模型就是辨識(shí)出來的系統(tǒng)模型。這一過程可用圖5 來表示。
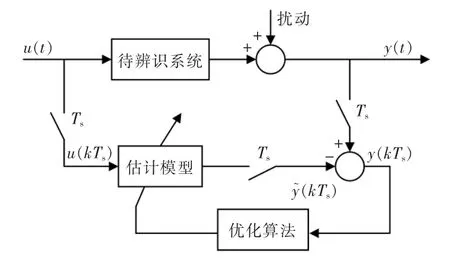
圖5 系統(tǒng)辨識(shí)結(jié)構(gòu)圖Fig.5 System identification structure
2.3 辨識(shí)數(shù)據(jù)篩選
從山西某電廠350 M W 循環(huán)流化床機(jī)組采集2020年3月1日至3月2日機(jī)爐協(xié)調(diào)系統(tǒng)的歷史數(shù)據(jù),采樣周期為10 s,共計(jì)8641 個(gè)數(shù)據(jù)點(diǎn),機(jī)爐協(xié)調(diào)系統(tǒng)歷史數(shù)據(jù)為圖6所示。
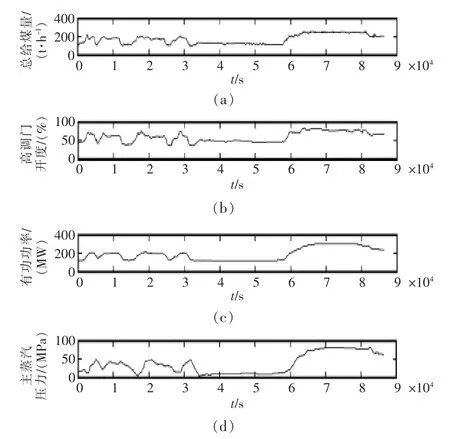
圖6 機(jī)爐協(xié)調(diào)系統(tǒng)歷史數(shù)據(jù)Fig.6 Historical data of boiler turbine coordination system
用于模型辨識(shí)的數(shù)據(jù)應(yīng)采用從一個(gè)穩(wěn)定工況開始終止于另一穩(wěn)定狀態(tài),通過對歷史數(shù)據(jù)的分析,選擇57000 s~72000 s 時(shí)間段的數(shù)據(jù)共計(jì)1500個(gè)數(shù)據(jù)作為辨識(shí)數(shù)據(jù),并對數(shù)據(jù)進(jìn)行零初始值處理。圖7 為零初始值處理后的模型辨識(shí)所用數(shù)據(jù)曲線。
2.4 估計(jì)模型的選擇
模型結(jié)構(gòu)的選擇需要以對被辨識(shí)系統(tǒng)的認(rèn)識(shí)為基礎(chǔ),使模型可以準(zhǔn)確地反應(yīng)控制系統(tǒng)的特性。估計(jì)模型的選擇是模型辨識(shí)過程中至關(guān)重要的一步,它直接決定著辨識(shí)結(jié)果的可用性與準(zhǔn)確性。數(shù)學(xué)模型與系統(tǒng)之間并不是一一對應(yīng)的關(guān)系,因此,在選擇模型結(jié)構(gòu)時(shí),只需要選擇適合的即可[15-16]。根據(jù)文章前半部分對系統(tǒng)被控對象動(dòng)態(tài)特性的分析,四個(gè)通道傳遞函數(shù)均選擇為帶有純遲延的高階慣性環(huán)節(jié)。
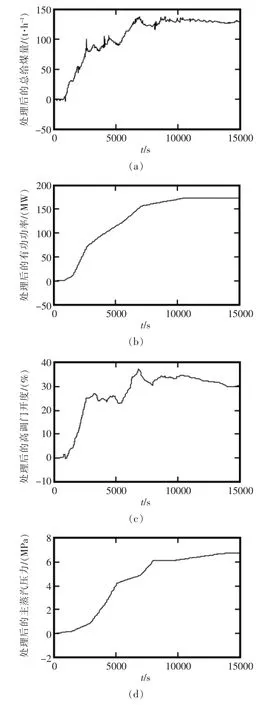
圖7 零初始值處理后的辨識(shí)數(shù)據(jù)曲線Fig.7 Identification data curve after zero initial value processing

2.5 系統(tǒng)辨識(shí)
觀察圖7,發(fā)現(xiàn)有功功率與主蒸汽壓力兩個(gè)輸出的幅值相差很大,不在同一個(gè)數(shù)量級(jí)上,因此選擇式(6)作為目標(biāo)函數(shù),對兩個(gè)輸出分別進(jìn)行辨識(shí)。
根據(jù)圖6 歷史數(shù)據(jù)曲線中輸入與輸出幅值的比較以及對350 MW 循環(huán)流化床機(jī)組協(xié)調(diào)系統(tǒng)特性的了解,選取一組較大的初始參數(shù)區(qū)間進(jìn)行辨識(shí)。當(dāng)?shù)玫揭唤M辨識(shí)參數(shù)之后,觀察實(shí)測數(shù)據(jù)與辨識(shí)結(jié)果曲線是否達(dá)到了可接受的誤差范圍之內(nèi)。一般情況下,第一次辨識(shí)的結(jié)果達(dá)不到所希望的要求,此時(shí),對已經(jīng)到達(dá)區(qū)間邊界的參數(shù)區(qū)間進(jìn)行擴(kuò)大、調(diào)整,再次進(jìn)行辨識(shí),直到得到一組令人可以接受的參數(shù)。在多次辨識(shí)之后,辨識(shí)參數(shù)區(qū)間選擇如下:
K(1~4)∈[0.1 0.1 0 -1]~[2 2 1 -0.01]
T(1~4)∈[100 500 100 10]~[300 1500 500 100]
n(1~4)∈[2 2 2 2]~[4 4 4 4]
τ(1~4)∈[50 50 10 10]~[200 200 100 200]
采用標(biāo)準(zhǔn)PSO 算法對模型參數(shù)進(jìn)行尋優(yōu),粒子個(gè)數(shù)M=60,進(jìn)化代數(shù)S=80,遺忘因子ω∈[0.8 1.2],學(xué)習(xí)因子c=[1.2 1.2]。利用標(biāo)準(zhǔn)PSO 算法進(jìn)行尋優(yōu)時(shí),由于粒子速度更新公式與初始化種群位置都是不確定的,因而每運(yùn)行一次程序結(jié)果都不會(huì)完全一致,經(jīng)過多次運(yùn)行程序,選取一組較好的運(yùn)行結(jié)果。該系統(tǒng)的辨識(shí)結(jié)果如圖8所示,各通道的傳遞函數(shù)見表1。
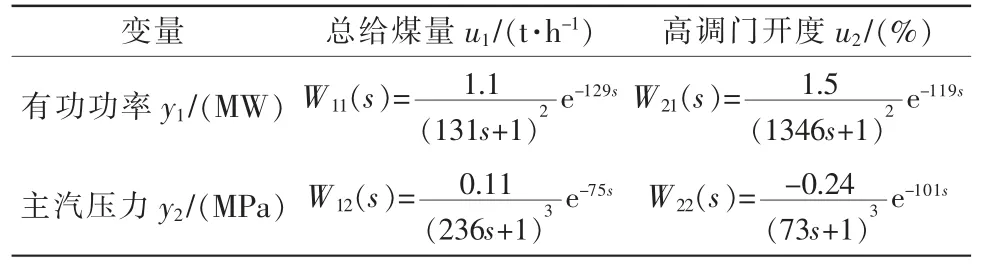
表1 傳遞函數(shù)模型表Tab.1 Transfer function model
從辨識(shí)結(jié)果來看,辨識(shí)的結(jié)果較好,要對協(xié)調(diào)系統(tǒng)進(jìn)行控制還需要對所辨識(shí)的模型進(jìn)一步驗(yàn)證,驗(yàn)證辨識(shí)結(jié)果是否與系統(tǒng)特性相一致。
2.6 模型驗(yàn)證
選取其他時(shí)間段的900 組采樣數(shù)據(jù)作為模型驗(yàn)證數(shù)據(jù),證實(shí)利用標(biāo)準(zhǔn)PSO 算法對多變量系統(tǒng)建模的準(zhǔn)確性。從圖9 中可以看出,模型輸出與系統(tǒng)實(shí)際輸出的曲線擬合的結(jié)果較好,達(dá)到了令人接受的程度,證實(shí)了利用標(biāo)準(zhǔn)PSO 算法對多變量系統(tǒng)建模的準(zhǔn)確性與可靠性。
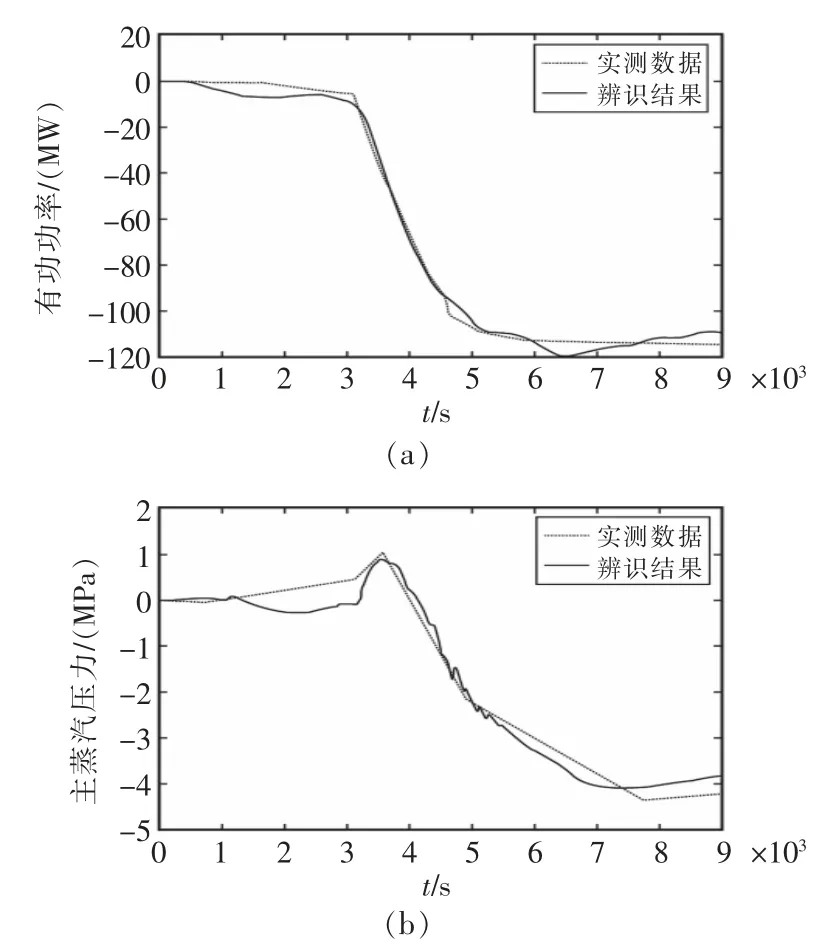
圖9 模型驗(yàn)證結(jié)果Fig.9 Model validation results
3 結(jié)語
為了更好地消納風(fēng)光等新能源,火電機(jī)組在運(yùn)行時(shí)必須進(jìn)行深度調(diào)峰,這就要求機(jī)組在保證安全的前提下具有較好的負(fù)荷響應(yīng)能力。對多變量系統(tǒng)進(jìn)行模型的建立是對其進(jìn)行控制的前提。本文利用標(biāo)準(zhǔn)PSO 智能算法對山西某電廠350 MW 循環(huán)流化床機(jī)組機(jī)爐協(xié)調(diào)系統(tǒng)進(jìn)行模型辨識(shí),得到總給煤量-有功功率、高調(diào)門開度-有功功率、總給煤量-主蒸汽壓力、高調(diào)門開度-主蒸汽壓力四個(gè)通道的傳遞函數(shù)。對辨識(shí)結(jié)果進(jìn)行驗(yàn)證之后,證實(shí)了利用標(biāo)準(zhǔn)PSO 算法對多變量系統(tǒng)建模的準(zhǔn)確性。本文所建立的協(xié)調(diào)系統(tǒng)模型對之后進(jìn)行機(jī)爐協(xié)調(diào)控制方案的設(shè)計(jì)及改進(jìn)提供了模型基礎(chǔ)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年5期)2021-01-04 01:29:00
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
廣西電力(2016年4期)2016-07-10 10:23:38