基于鐵路無人機通信云計算卸載優化方案
2020-10-09 11:21:48陳明陽龍時丹
鐵路通信信號工程技術 2020年9期
陳明陽,劉 霞,龍時丹
(1.北京郵電大學 信息與通信學院,北京 100876;2.國家鐵路局裝備技術中心, 北京 100070)
近年來開始使用無人機對鐵路線路、長大橋隧等基礎設施的一些維修人員難以進入的區域進行監測,特別是在缺乏通信設施的地區,無人機可用作蜂窩網絡內的飛行移動終端,比如在川藏鐵路的山區、長大鐵路隧道等區域大顯身手。由于無人機輔助的通信全方位覆蓋,并且無人機可以作為輔助,為現存通信基礎設施提供無空隙服務,這種服務在即將到來的5G時代顯得彌足珍貴,進一步研究包括優化無人機的飛行能力與路徑,結合無人機提供通信信道的特點,挖掘出無人機未來在鐵路通信領域的更大潛力尤為重要,因此,鐵路用無人機通信云計算卸載優化方案的研究勢在必行。
對于傳統云計算的架構,比如地面云計算網絡,無人機云計算結構有更加顯著的優勢。無人機可以在任意場景下提供云計算服務,比如沙漠、高原或者地理環境比較復雜多變的地方,而這些地方是不能建立地面云計算服務器的。無人機的計算能力更加優越,并具有更短的時延,因為短距離的lineof-sight更容易得到保障。無人機的軌跡可以根據不同任務進行優化,以便更好的提高計算性能,而傳統網絡的可塑性較弱。基于上述優點,國際許多科研機構已經啟動無人機云計算相關項目的研究,并將其投入使用。
基于鐵路無人機云計算卸載優化方案主要的關注點是配置一個移動無人機,并向鐵路移動設備提供計算卸載服務。本文解決一個關鍵問題,就是同時優化在上行與下行信道與無人機本地計算的字節分配,以及無人機飛行的路徑,以達到最小化能耗的目標。對于上行與下行傳輸,采用了正交與非正交頻分復用,這種技術在5G網絡中大有可為,本文解決了正交傳輸,達到時延與能量限制條件下的優化方案。
1 基于鐵路無人機通信云計算卸載優化方案
無人機云計算卸載優化方案研究包括:一是模型的建立,明確優化變量。變量主要為無人機飛行路徑、無人機接收移動用戶數據(上行數據)、無人機本地云計算數據和無人機發送給移動用戶數據(下行數據)等;二是優化無人機云計算路徑與比特分配。
1.1 建立無人機通信云計算能耗模型
本文考慮無人機云計算的3種能量損耗,分別是本地計算消耗能量,飛行所需要能量與傳輸數據消耗能量。
1)無人機本地計算消耗能量
假設無人機的CPU頻率是fc,那么執行移動用戶MUk所輸入的l bit所需要的能量:



使得總能量消耗等于:

2)無人機飛行所需能量


3)無人機傳輸數據消耗能量



其中,g0表示在1 W的傳輸能量在1 m的距離內最終的收益。傳輸信道模型假定為加性高斯白噪,能量譜密為N0。
對于非正交方式,上行傳輸能量消耗如下:
下行傳輸能量如下:
1.2 建立無人機信息傳輸模型
本文考慮兩種信道傳輸模型,一種是正交方式,另一種是非正交方式。使用頻分復用(FDD)的方式,并且分配的帶寬為B。在5G網絡中,非正交方式,也稱NOMA,被更為廣泛的使用。如圖1所示,對于正交傳輸方式,在每個時間間隔之中又等分成K個時隙。在第k個時隙中,無人機僅與第k個移動用戶進行數據交互。本文中K=3。對于移動用戶MUk,其中k∈K,輸入待處理信息為Ikbit,處理1 bit需要的CPU轉數為Ck,經過處理后輸出信息為Okbit。
對于非正交方式,在每一個時間間隔之中,無人機與全部移動用戶進行通信。對于其中的每一個移動用戶,在與無人機進行數據交換時,會受到其他數據的干擾,這使得增益減少。可以在上一部分非正交方式傳輸能量的表達式中發現,每一移動用戶傳輸能量損耗與其他移動用戶能量有關。
1.3 建立無人機通信計算優化的模型

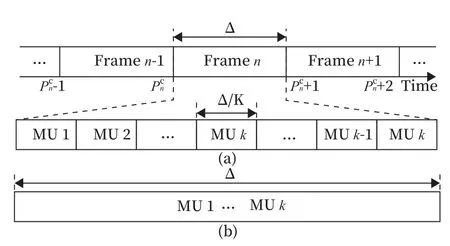
圖1 正交傳輸方式與非正交方式兩種模型Fig.1 Orthogonal and non-orthogonal transmission modes

無人機云計算模型如圖2所示,包含地面上的移動用戶,飛行的無人機,以及無人機與移動用戶進行的雙邊通信。
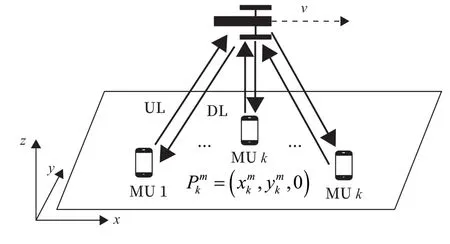
圖2 無人機云計算模型11/5000Fig.2 UAV cloud computing model

1.4 無人機通信云計算路徑與比特分配優化方案
無人機云計算路徑與比特分配優化方案是在一定邊界條件下,比如無人機飛行能力(包括距離、速度等),無人機數據傳輸能力等一系列條件下,通過優化無人機飛行軌跡與傳輸數據分配,以得到最優化。
1)對飛行速度限制的優化
由于無人機飛行技術的限制,無人機飛行速度是有限制的。所以在優化無人機軌跡的同時,要考慮相關速度限制。顯然,無人機在第n個時間間隔內的飛行速度為:

由上述無人機飛行速度限制,可以得到如下表達式:

對于無人機總體的飛行,需要在指定的時間T內完成指定路程,所以得到如下對于速度的限制:

2)對無人機數據傳輸能力限制的優化


根據上述算得無人機CPU頻率,以及在1.1節中已經推得的云計算計算能量的表達式,可以繼續推導得到計算卸載優化所需的計算能量為:

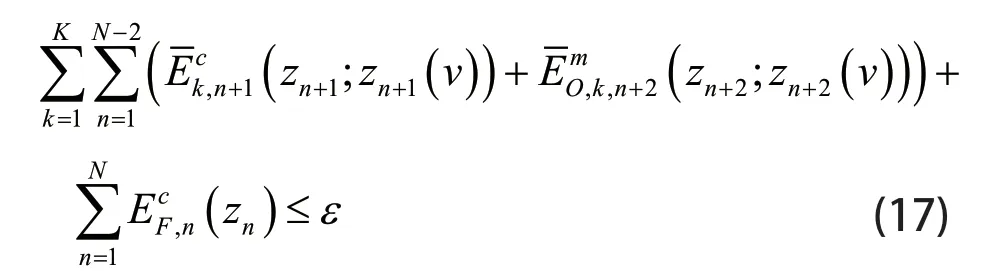
其中,上式中ln={lk,n}(k∈K),代表在第n個時間間隔內K個移動用戶需要無人機處理的全部數據。在本文中,為簡單起見,只假設3個移動用戶。無人機總體的能量限制比較簡介,只需要在全部N個時間間隔內,無人機飛行能量,無人機傳輸信息能量,與無人機本地計算能量的總和小于等于總的能量限制。于是可以得到如下優化表達式:

其中,ε代表無人機飛行過程中可得到的總能量。以上為無人機云計算能量限制。
3)對無人機傳輸信息分配限制的優化
對于無人機傳輸信息的分配,也需要滿足一系列限制條件。比如在任一時刻,無人機接收到的數據要大于等于無人機本地計算的數據。原因是無人機云計算本地處理的數據來自于移動用戶向無人機發送的數據。如果前者大于后者,將會與真實情況矛盾。

對于無人機處理完的數據限制也需要優化。無人機發送給地面移動用戶的數據要小于等于無人機CPU計算處理之后的數據。同時,幾個待優化的傳輸數據變量也要滿足限制條件。簡而言之,方案優化后,在第n+1個時間間隔無人機云計算本地計算的總數據小于等于在第n個時間間隔以及之前無人機從移動用戶接收到的總數據。在第n+2個時間間隔之中無人機向移動用戶發送的數據要不大于n+1時間間隔之前無人機已經計算處理好的數據。
2 基于正交方式優化方案的實現

1)for v in 0:iteration;其中iteration為設定的迭代次數;
2)If z(v)是原優化問題最優解,break;

介紹的步長函數;
5)v=v+1
以上為程序的簡要結構。
在偽代碼的第三步中,涉及到轉換后的凸優化問題。該問題是根據原始模型轉換而來。待優化問題如下:

新的邊界條件如下:
3 仿真結果及性能分析
3.1 基于正交傳輸的無人機云計算方案仿真結果分析
使用MATLAB仿真時,設置的數據長度為L=104,Q/N0=15.75 dB情況下的誤比特率如圖3所示。
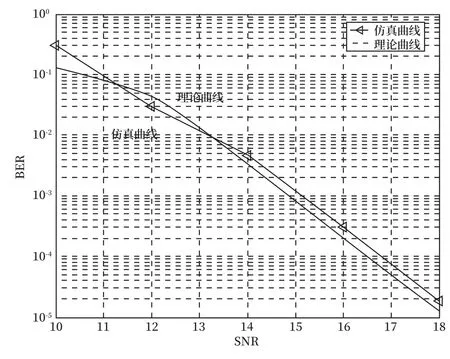
圖3 Q/N0=15.75 dB情況下的誤比特率Fig.3 Bit error rates for Q/N0=15.75 dB
3.2 未進行優化的無人機計算方案仿真
再將仿真曲線與LDPC方案的曲線相比較,如圖5所示。
從圖5可以看出,為了達到BER低于10-5的要求,TCM-DPC方案比LDPC方案的發送功率小于12 dB。
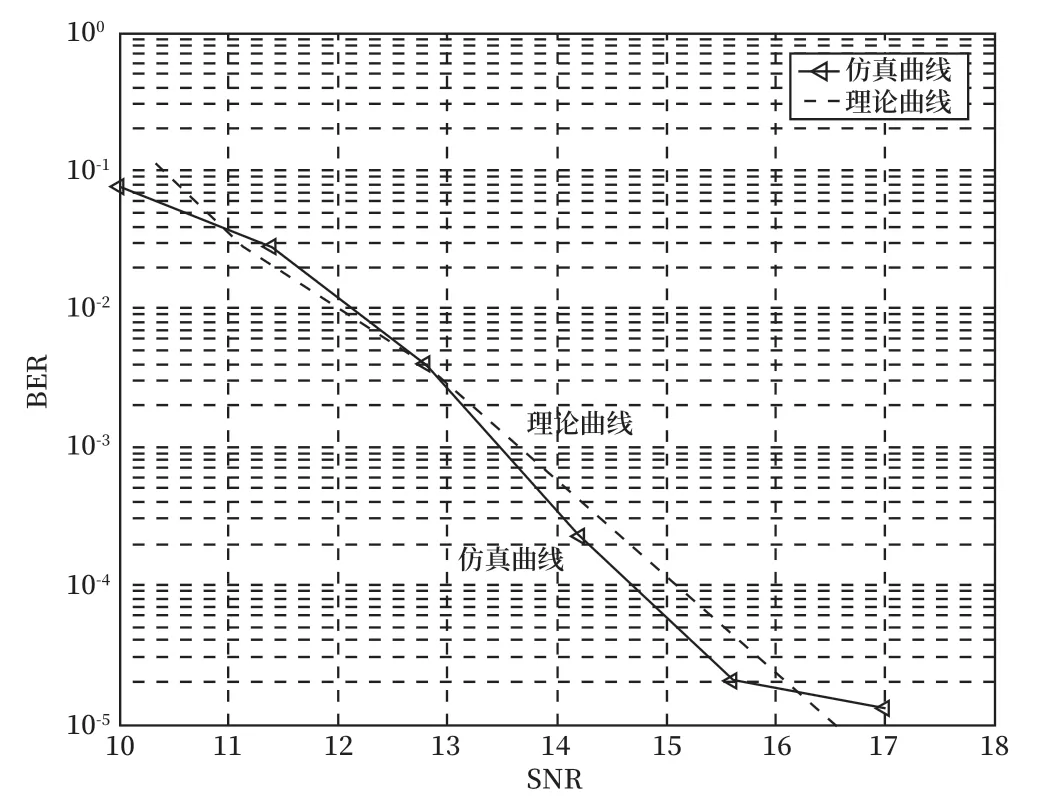
圖4 Q/N0=19.06 dB情況下的誤比特率Fig.4 A comparison between the bit error rates of two schemes for Q/N0=19.06 dB
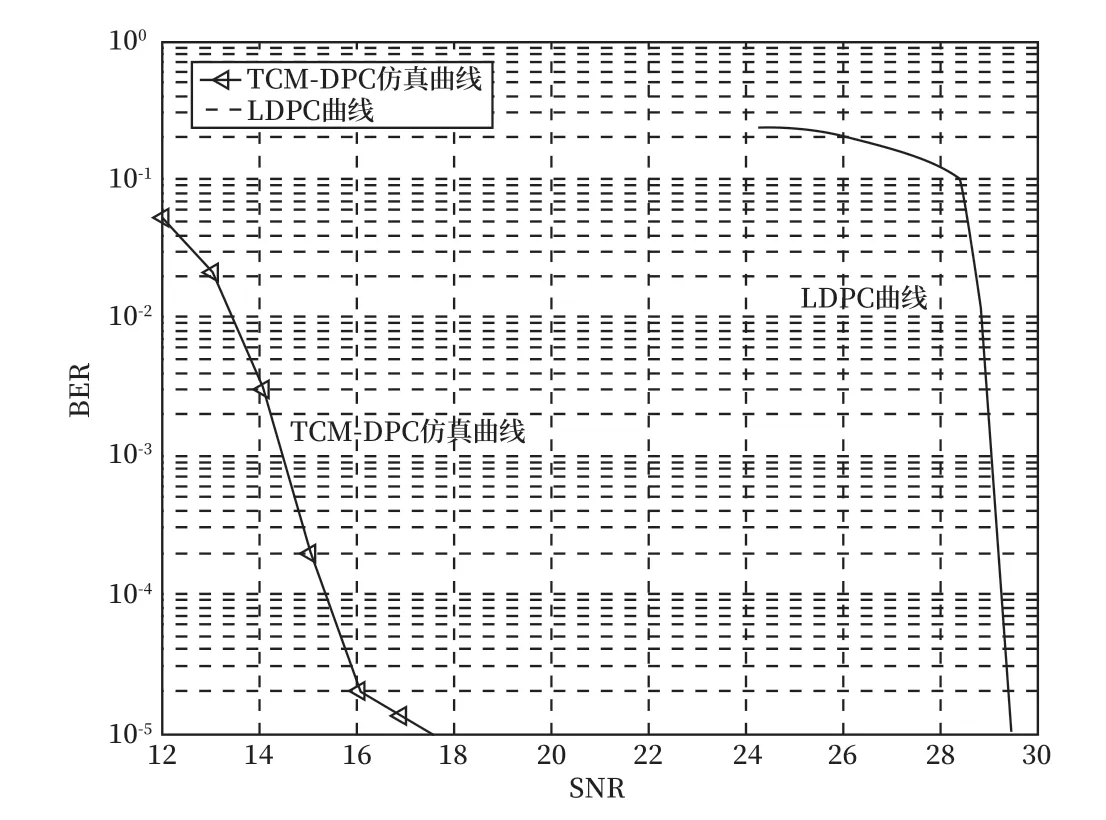
圖5 Q/N0=19.06 dB情況下兩種方案的誤比特率比較Fig.5 A comparison between the bit error rates of two schemes for Q/N0=19.06 dB
4 結論
主要研究鐵路應用無人機云計算卸載優化具體方案,給出無人機云計算卸載優化方案相關模型和仿真。本文對無人機計算卸載優化方案進行建模,明確了待優化變量,包括無人機飛行軌跡、無人機傳輸數據分配等,關于鐵路應用無人機計算卸載的優化方案的仿真是基于正交的信息傳輸方式。因為考慮程序的運行速度以及性能,本次的仿真代碼迭代次數有限,導致優化方案的精度有限,具體的優化結果有待進一步研究與具體實現。不過,鐵路用無人機云計算的研究可繼續深化,發展前景廣闊。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
云南畫報(2021年12期)2021-03-08 00:50:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
鐵道通信信號(2018年7期)2018-08-29 01:17:04
光學精密工程(2016年6期)2016-11-07 09:07:19
