緊湊型自行車立體車庫結構設計及控制系統研究
2020-09-29 02:55:34祁宇明蘇衛華劉朝華
工程設計學報 2020年4期
祁宇明,謝 兵,,王 剛,蘇衛華,劉朝華
(1.天津職業技術師范大學機器人及智能裝備研究所,天津300222;2.天津(濱海)人工智能創新中心,天津300222)
在綠色、低碳、共享理念的大力宣傳下,電動車、自行車已成為市民出行必不可少的交通工具。據不完全統計,兩輪電動車的社會保有量已達2.9億輛[1],共享單車的投放量達2 300萬輛[2]。自行車作為一種低碳環保的交通工具備受大眾青睞,可用作公交車站、地鐵站間的接駁工具,從而減少交通擁堵和環境污染現象的發生[3-4]。然而,杜絕自行車被盜丟失、防止自行車亂停亂放等問題亟待解決。
對于汽車的存放,國內外學者已設計了多種停車庫[5-8],主要分為升降、橫移、堆垛及循環等9種方式,但汽車停放姿態固定,其停車庫不適用于自行車。自行車數量龐大且可自由停放,如何擴大自行車存放空間和提高車庫空間的利用率十分關鍵。上海電機學院的劉俊等[9]基于 PLC(programmable logic controller,可編程邏輯控制器)設計了一種多層循環式自行車庫,其占地面積小,充分利用了立體空間,但該車庫仍處于理論研究階段,暫未投產使用;天津職業技術師范大學和天津遠卓科技發展有限公司共同研發了國內第1個自行車智能存取系統[10-12],該系統一次可存放240輛自行車,但其占地面積相對較大且需改變地形地貌;Springer等[13]介紹了日本工程公司研發的Eco-Cycle自行車存放系統,其深度約為11 m,直徑約為9 m,可容納200輛自行車,但該系統造價昂貴。
為解決現有自行車立體車庫存在的問題,筆者設計了一種緊湊型自行車立體車庫,改變了自行車傳統固定姿態停放的方式。首先,對緊湊型自行車立體車庫的整體結構和工作原理進行介紹,并利用D-H法計算推拉夾持機構的可達工作空間范圍;然后,對緊湊型自行車立體車庫的關鍵機構進行設計;接著,從硬件及軟件兩方面對緊湊型自行車立體車庫的控制系統進行設計;最后,通過搭建樣機對緊湊型自行車立體車庫的可行性進行驗證。
1 緊湊型自行車立體車庫的整體結構與工作原理
1.1 整體結構
本文所設計的緊湊型自行車立體車庫主要分為出入庫子系統、控制子系統和人機交互子系統三個部分。為滿足緊湊型的設計要求,實現全方位存車,同時增加自行車存放數量,采用六自由度并聯機構來設計出入庫子系統,使其在規定的工作空間內完成自行車的存取;為保證良好、穩定、快速的動態響應,控制子系統采用西門子PLC對出入庫子系統進行邏輯控制;人機交互子系統用于實現自行車存取的自助操作。
緊湊型自行車立體車庫的結構如圖1所示,其主要由夾持推拉機構、旋轉升降機構(包括旋轉機構和升降機構)、聯動機構和載車架組成,其中載車架采用拼接組合模式。

圖1 緊湊型自行車立體車庫的結構示意圖Fig.1 Structure diagram of compact bicycle stereo garage
為保證自行車立體車庫的緊湊性,需充分利用空間及合理布置載車架,因此應對推拉夾持機構的可達工作空間范圍進行分析計算。本文基于D-H法,通過位姿變換來求解夾持推拉機構的運動學正解,以得到其可達工作空間范圍與初始位姿參數的關系。為準確描述緊湊型自行車立體車庫各連桿的運動情況,需要建立多個坐標系。如圖2所示,在底座中心o1(即聯動機構中心)處建立固定坐標系o1-x1y1z1,即基坐標系o0-x0y0z0,其中,z1軸垂直于固定底座向上,y1軸沿導軌方向;在旋轉機構質心o2處建立坐標系o2-x2y2z2,旋轉機構繞z2軸旋轉θ后,坐標系o2-x2y2z2變為o2-x′2y′2z′2;在升降機構質心o3處建立坐標系o3-x3y3z3;在夾持推拉機構質心o4處建立坐標系o4-x4y4z4。
由圖3可知,緊湊型自行車立體車庫各坐標系間的變換矩陣如下:
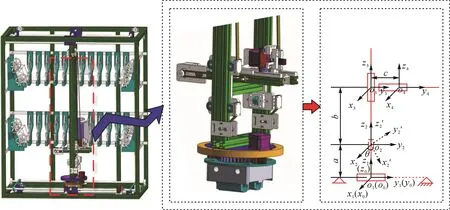
圖2 緊湊型自行車立體車庫的D-H坐標系Fig.2 D-H coordinate system of compact bicycle stereo garage
式中:cθ表示cosθ,sθ表示sinθ;Δx、Δy表示機構相對原點的x、y方向的移動量;θ表示旋轉機構的旋轉角度;a表示聯動機構中心與旋轉機構質心之間的距離,為常數;b表示升降機構質心與旋轉機構質心之間的距離,為變量;c表示夾持推拉機構質心與升降機構質心之間的距離,為變量。
則夾持推拉機構的正運動學解為:
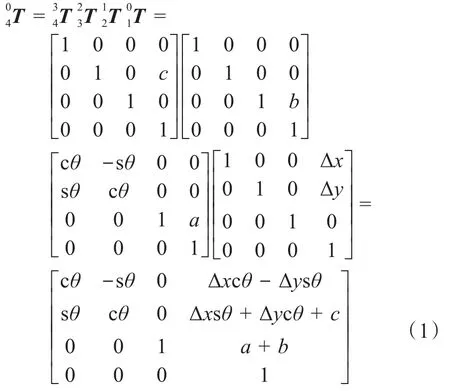
根據式(1)可知,夾持推拉機構的位姿取決于旋轉機構的旋轉角度θ,機構移動量Δx、Δy以及機構間的距離b、c。由此可得推拉夾持機構的可達工作空間范圍:x方向為Δxcθ-Δysθ,y方向為Δxsθ+Δycθ+c,z方向為a+b。
1.2 工作原理
緊湊型自行車立體車庫的工作流程如圖3所示,主要分為存車與取車兩部分。
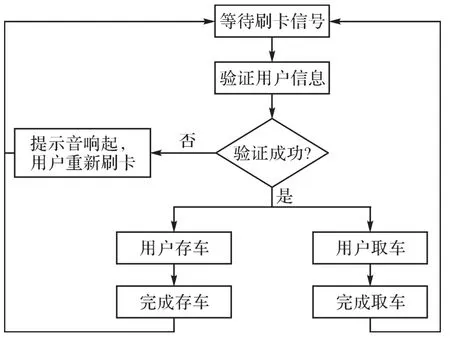
圖3 緊湊型自行車立體車庫的工作流程Fig.3 Work flow of compact bicycle stereo garage
1)自行車存放。首先,通過磁卡來確認用戶的身份信息,待用戶將自行車推至指定位置后,控制子系統發出指令,出入庫子系統中的機械手張開并夾持自行車,并由夾持推拉機構將自行車送至車庫內部;然后,根據自行車就近入庫原則,通過夾持推拉機構、旋轉升降機構以及聯動機構的相互配合和快速聯動,將自行車移動至最近的載車架前;最后,將自行車推送至載車架中,并在完成自行車存放的同時系統回零(初始狀態)。
2)自行車提取。通過磁卡來確認用戶的身份信息,控制子系統發出指令,夾持推拉機構、旋轉升降機構及聯動機構快速聯動,從載車架中取出自行車并推至門口,并在完成取車過程的同時系統回零(初始狀態)。
2 緊湊型自行車立體車庫關鍵機構設計
2.1 夾持推拉機構設計
2.1.1 夾持推拉機構的工作原理
考慮到傳統夾持推拉機構易引起車輪變形且效率較低,采用單向平轉夾持機械手機構作為緊湊型自行車立體車庫的夾持推拉機構,其結構如圖3所示。夾持推拉機構的工作過程為:伺服電機帶動齒輪轉動,通過齒輪齒條、光軸與直線軸承配合完成直線運動,實現機械手開合。
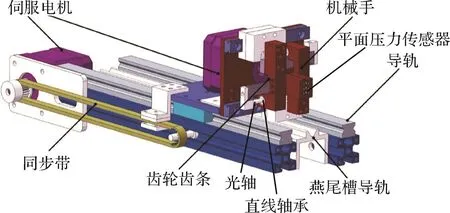
圖4 夾持推拉機構的結構示意圖Fig.4 Structure diagram of clamping push-pull mechanism
2.1.2 夾持推拉機構的關鍵部位分析
夾持推拉機構中機械手所受的最大載荷為自行車的重力。設自行車的質量為25 kg,自行車車輪與機械手之間的摩擦系數為0.6,則機械手所承受的載荷為147 N。夾持推拉機構的受力情況如圖5所示。其中:F1表示自行車對機械手的壓力,F2表示自行車對地面的壓力,F3表示自行車對載車架的壓力;F11表示地面對自行車的支持力,F22表示載車架對自行車的支持力;f1表示地面對自行車的摩擦力,f2表示載車架對自行車的摩擦力,f3表示機械手對自行車前輪的摩擦力。
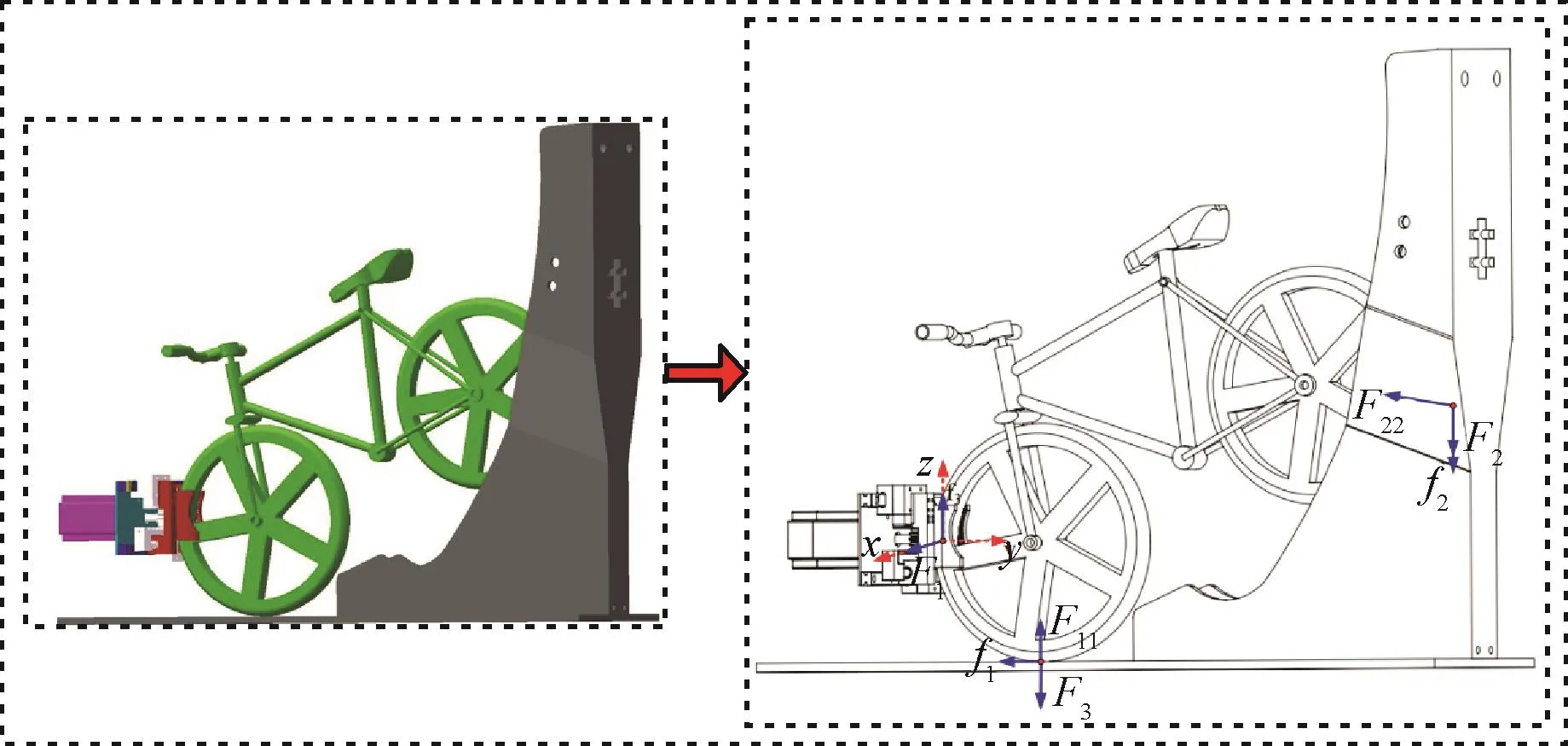
圖5 夾持推拉機構受力分析示意圖Fig.5 Force analysis diagram of clamping push-pull mechanism
為驗證夾持推拉機構中機械手的強度是否滿足工作要求,利用ANSYS軟件對其進行靜力學分析[14],結果如圖6所示。
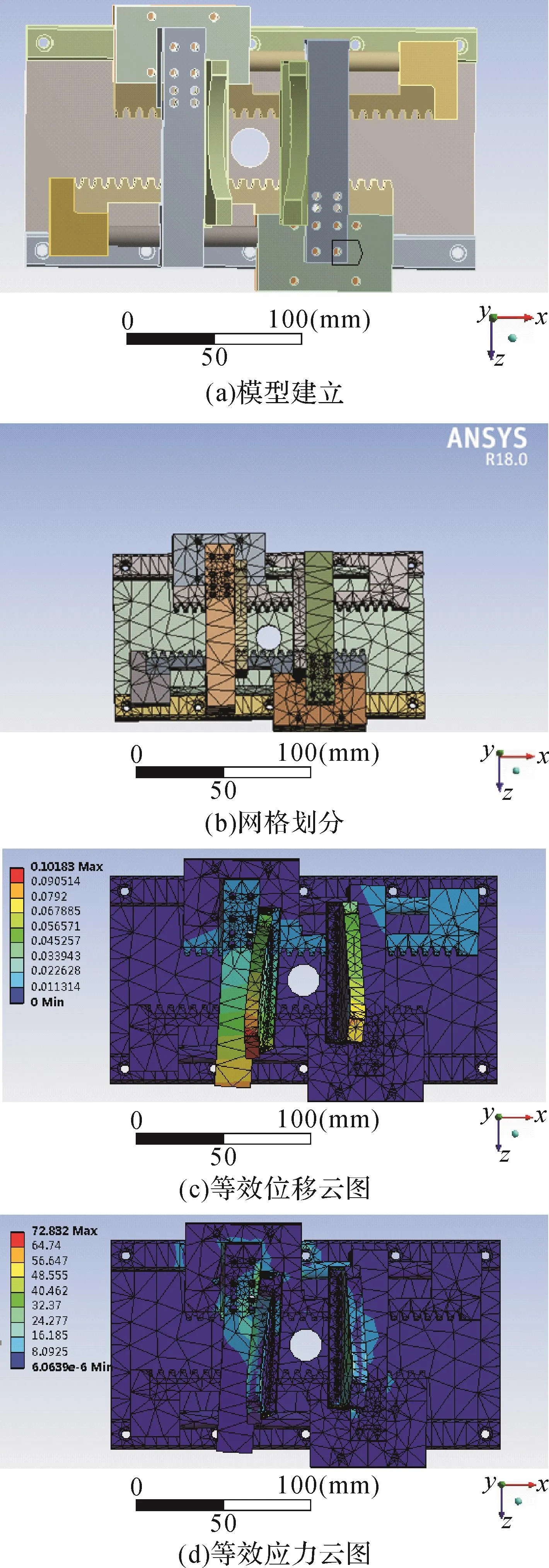
圖6 夾持推拉機構中機械手的靜力學分析結果Fig.6 Static analysis results of manipulator in the clamping push-pull mechanism
由圖6可知,機械手的最大應力為72.832 MPa,低于45#鋼的許用應力253 MPa;機械手的最大變形量為0.101 83 mm,滿足實際工況的要求。
2.2 旋轉升降機構設計
旋轉升降機構主要承受的負載為自行車重力。為使旋轉升降機構具有較高的輸出扭矩和運動穩定性,采用行星輪系轉動機構傳動,利用電機驅動行星輪系、同步輪運動,以帶動機構進行旋轉和升降運動。旋轉升降機構的整體結構及其旋轉機構的結構如圖7所示。
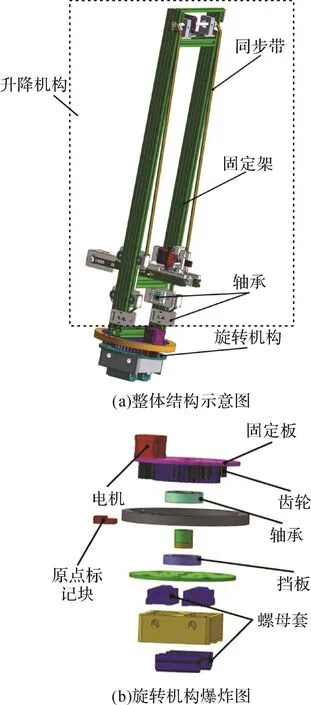
圖7 旋轉升降機構的結構示意圖Fig.7 Structure diagram of rotary lifting mechanism
設行星輪系轉動機構的輸入功率為P1;行星輪系中大小齒輪的齒數比為u;根據工作條件,大小齒輪均采用20CrMnTi鋼滲碳淬火工藝,其硬度為56~62 HRC。查機械設計手冊可知[15],20CrMnTi鋼滲碳淬火齒輪的彎曲疲勞強度極限應力σFlim=450MPa,接觸疲勞強度極限應力σHlim=1500MPa,則齒輪的許用彎曲應力、齒根彎曲應力KF、齒輪的轉矩T1、大小齒輪重合度ε、大小齒輪重合度系數Yε、齒輪模數S和齒輪的應力循環次數N分別為:
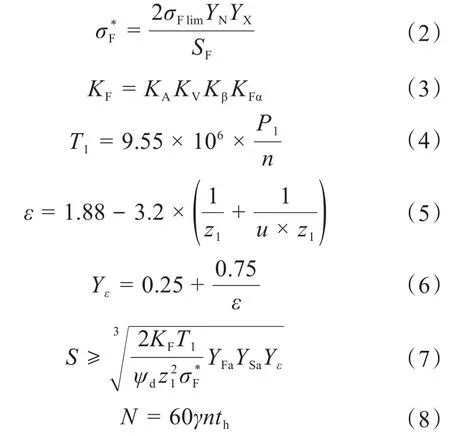
式中:YN表示齒輪的壽命系數;YX表示齒輪的尺寸系數;SF表示齒根彎曲疲勞安全系數;KA表示齒輪的使用系數;KV表示齒輪的動載系數;Kβ表示齒向載荷分布系數;KFα表示齒間載荷分配系數;ψd表示齒寬系數;YFa表示齒形系數;YSa表示應力修正系數;γ表示齒輪每轉一周同一齒面的嚙合次數;n表示小齒輪轉速;th表示齒輪的設計壽命;z1表示小齒輪的齒數。
在緊湊型自行車立體車庫樣機中,輸入功率P1=3.2kW,行星輪系中大小齒輪的齒數比u=2,小齒輪齒數z1=20,齒寬系數ψd=0.8,小齒輪的轉速n=350 r/min,齒形系數YFa=2.053,應力修正系數YSa=2.65,齒輪的壽命系數YN=1.2,齒輪的尺寸系數YX=1,齒根彎曲疲勞安全系數SF=2×2=4,則可得:
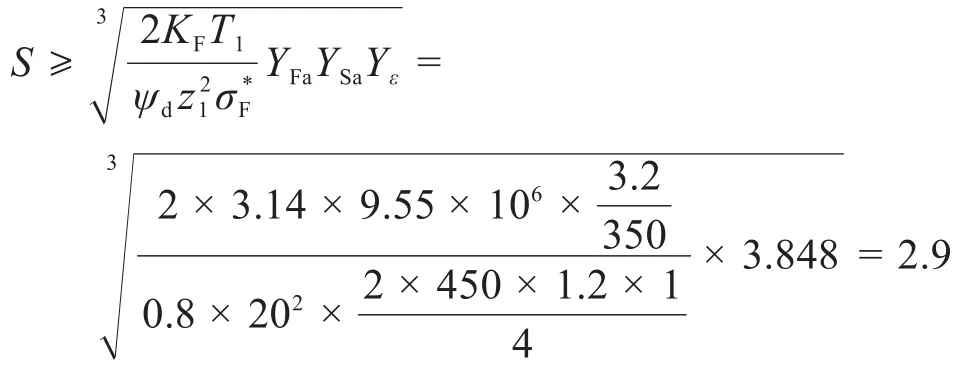
取行星輪系中齒輪的標準模數S=3。
為保證行星輪系轉動機構運行穩定,避免不必要的沖擊,需對齒面靜強度進行校核。齒輪的許用接觸應力、最大許用接觸應力及齒面最大接觸應力分別為:
式中:SH表示齒面接觸疲勞強度的安全系數,SH=1;S'H表示靜強度安全系數,S'H=1.3;ZN表示接觸疲勞強度壽命系數,ZN=1.03;Z'N表示靜強度壽命系數,Z'N=1.6;T1max表示由外在因素引起的齒輪轉矩過載量,T1max=2T1。
聯立式(8)、式(9)和式(10),可得:
根據計算結果可知,行星輪系中齒輪的彎曲疲勞強度和齒面靜強度均滿足工作要求。
2.3 聯動機構設計
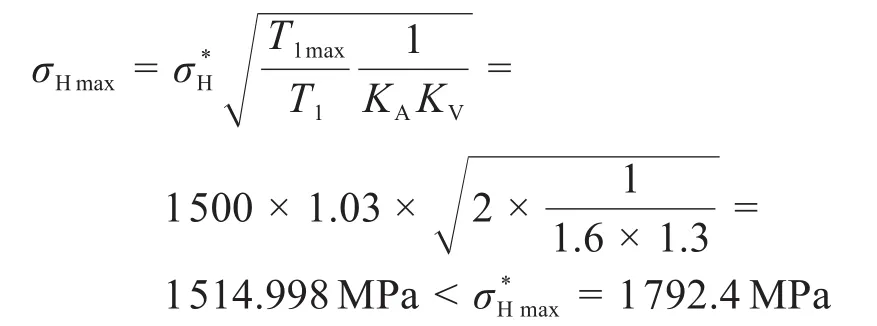
聯動機構主要分為兩部分:頂部同步伴隨機構和底部協同運動機構,其整體結構如圖8(a)所示;其中底部協同運動機構主要是通過電機帶動同步帶來實現旋轉升降機構和夾持推拉機構在水平方向的快速運動,其結構如圖8(b)所示。為保證旋轉升降機構運行過程穩定、可靠,在旋轉升降機構頂部安裝1套“十”字伴隨裝置,以與底部協同運動機構穩定聯動。
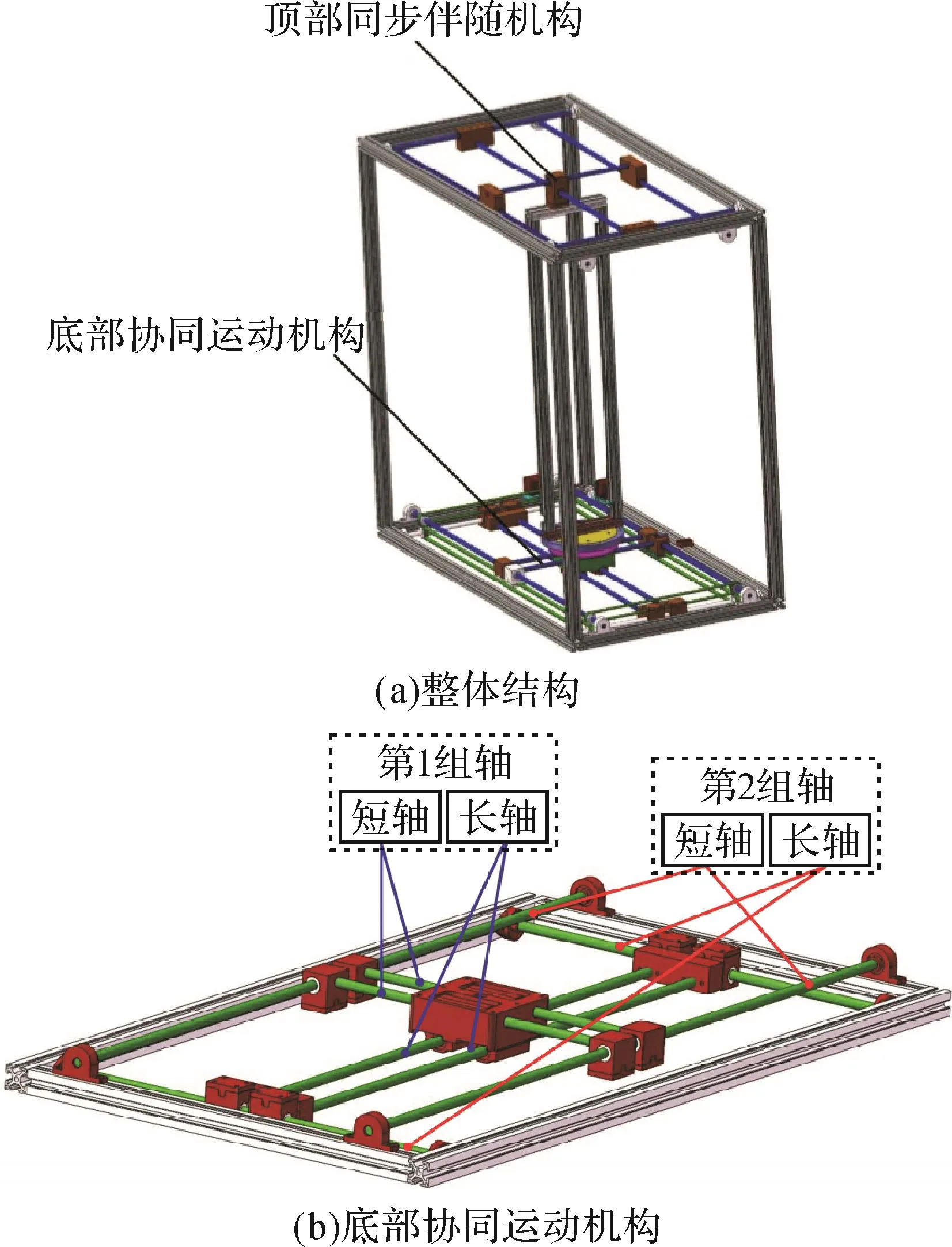
圖8 聯動機構的結構示意圖Fig.8 Structure diagram of linkage mechanism
假設在底部協同運動機構中,所有軸承受的總重力G=200N,則每根軸所承受的力;45#鋼的許用彎曲應力σ*=300MPa。假設第1組軸中長軸的長度l1=900 mm,其固定端處的分力FA=。根據截面法分析可得,該軸的彎矩分布情況如圖9所示。由圖可知,當軸上滑塊位于長軸正中間時,該軸所受的彎矩最大,最大彎矩。
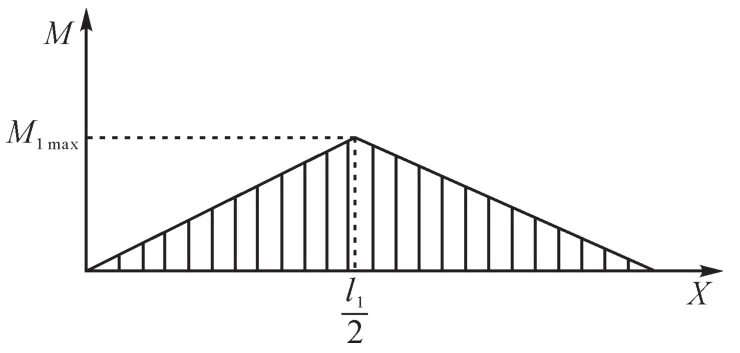
圖9 第1組軸中長軸的彎矩分布Fig.9 Bending moment distribution of long axis in the first group of axes
基于強度要求,軸的最大正應力應小于材料的許用彎曲應力[15],即:
由此可得第1組軸中長軸的直徑為:
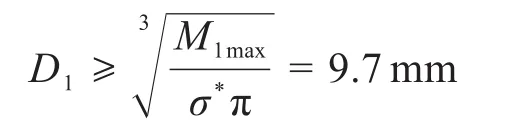
假設第2組軸中長軸的長度l2=1 100 mm,其固定端所受的扭矩T=0.4N?m,該軸的自重忽略不計。此組軸承受的載荷為徑向重力和端部周向轉矩,因此其失效形式為強度過大導致的彎曲。根據截面法分析可得,該軸的彎矩分布情況如圖10(a)所示,扭矩分布情況如圖10(b)所示。當軸上滑塊位于該軸正中間時,該軸所受的彎矩最大,最大彎矩。
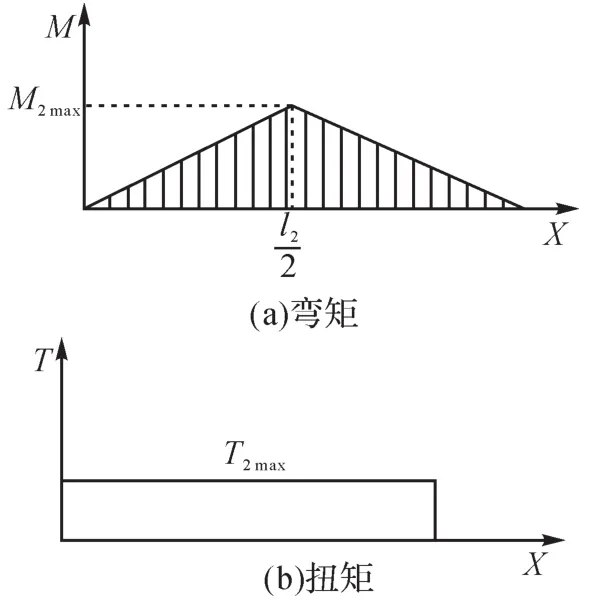
圖10 第2組軸中長軸的彎矩和扭矩分布Fig.10 Bending moment and torque distribution of long axis in the second group of axes
根據第四強度理論計算該軸的最大正應力:

由此可得第2組軸中長軸的直徑為:

通過理論計算和經濟性預估可知,長軸的直徑均取12 mm。通過合理設計聯動機構,可保證整個緊湊型自行車立體車庫的運行穩定性與可靠性。
3 緊湊型自行車立體車庫的控制系統設計
3.1 硬件設計
緊湊型自行車立體車庫控制系統的硬件結構如圖11所示,主要包括檢測傳感器、聯動機構電機、夾持推拉機構電機、旋轉升降機構電機、PLC模塊、上位機等組件以及人機交互界面、語音通信設備、IC(inte-grated circuit,集成電路)卡讀卡器等輔助設備[16]。

圖11 緊湊型自行車立體車庫控制系統的硬件結構Fig.11 Hardware structure of compact bicycle stereo garage control system
3.2 軟件設計
采用STEP-7軟件對緊湊型自行車立體車庫控制系統的軟件部分進行編程設計,其主程序主要包括存車部分與取車部分,具體流程如圖12所示。存車時,當用戶刷卡下達存車指令后,自行車立體車庫的控制系統判斷車庫中最近的空閑位置并將該位置的相關信息寫入PLC模塊[17-19],同時夾持推拉機構到達門口;然后車庫門打開,機械手抓取自行車并將其拉入車庫;接著,提示音響起,車庫門關閉,夾持推拉機構、旋轉升降機構和聯動機構配合聯動將自行車送至載車架處;最后,各運動機構回原點,顯示屏中自行車剩余位置數量減1。取車時,當用戶刷卡下達取車指令后,自行車立體車庫的控制系統先判斷用戶身份信息,若與系統中已存信息不一致,則返回系統主頁面并等待;若與系統中已存信息一致,則夾持推拉機構、旋轉升降機構和聯動機構配合聯動,將自行車從載車架上取出并推送至車庫門口,車庫門打開。然后,夾持推拉機構將自行車推出車庫并松開。最后,各運動機構回原點,提示音響起,車庫門關閉,顯示屏中自行車剩余位置數量加1。
4 緊湊型自行車立體車庫調試試驗
緊湊型自行車立體車庫樣機如圖13所示,其尺寸為1 100 mm×600 mm×1 060 mm,共有30個載車架,在存、取車處安裝人機交互界面和IC卡讀卡器。
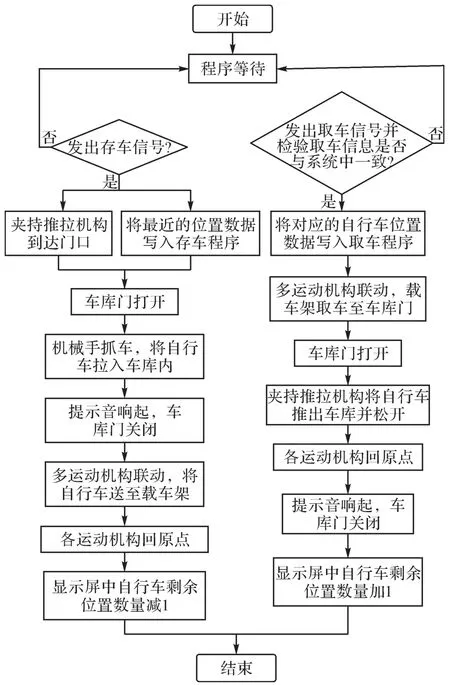
圖12 緊湊型自行車立體車庫控制系統主程序流程Fig.12 Main program flow of compact bicycle stereo garage control system
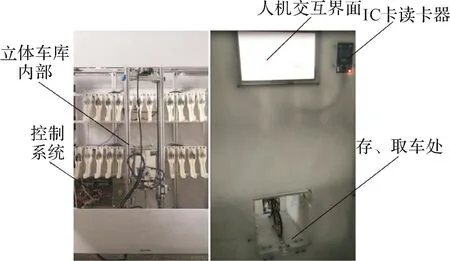
圖13 緊湊型自行車立體車庫樣機Fig.13 Prototype of compact bicycle stereo garage
將編寫好的程序分別下載至PLC模塊和人機交互界面中,待各設備進入正常工作狀態后進行自行車存取調試。試驗結果表明,存車時,可精確快速地將自行車存入載車架中,存車時間約為6 s;取車時,可準確地驗證用戶身份信息,且能快速地將自行車從對應的載車架中取出,取車時間約為5.5 s。結果表明,該緊湊型自行車立體車庫可以很好地實現自行車存取,且具有自動化程度高、性能穩定和結構可靠等優點。
5 結 論
自行車立體車庫的機械結構與控制系統較為復雜,本文基于PLC、伺服電機和人機交互技術設計了緊湊型自行車立體車庫,實現了自行車的高效存取。本文的主要創新點為:1)在旋轉升降機構中,采用行星輪系提供較大的旋轉扭矩,可保證車庫安全、可靠地運行;2)載車架采用拼接組合模式,減小了自行車的存放面積,增加了存車數量,使車庫結構緊湊;3)車庫控制系統的智能化和自動化水平較高。