半自動擰取式菠蘿采摘收集機的設(shè)計與分析
2020-09-29 02:55:14李晨曦鄭兆啟
工程設(shè)計學(xué)報 2020年4期
傅 旻,李晨曦,鄭兆啟
(1.天津科技大學(xué)機械工程學(xué)院,天津300222;2.天津市輕工與食品工程機械裝備集成設(shè)計與在線監(jiān)控重點實驗室,天津300222)
我國是菠蘿的生產(chǎn)和消費大國。近年來,國內(nèi)菠蘿的年均消費量以7.5%的速度增長[1],種植面積不斷增加,如何提高菠蘿的產(chǎn)量和采摘收集效率是目前亟待解決的實際問題。由于菠蘿植株及其果實的結(jié)構(gòu)特殊,目前菠蘿的采摘作業(yè)仍以人工為主,整個采摘作業(yè)需要的人力成本占菠蘿生產(chǎn)總成本的40%[2-3]。總體而言,目前菠蘿產(chǎn)業(yè)存在人工勞動強度較大及采摘效率低的問題,需使用機械采摘設(shè)備來解決這些問題。
目前,許多學(xué)者已針對果實采摘機械進行了大量研究。例如:張西成等[4]設(shè)計了一種純機械式手持菠蘿機械采摘手,該機械手利用鋸齒型剪來剪斷菠蘿果柄,同時配合人手腕進行左右掰動,以完成采摘動作,其缺點是采摘過程中仍需投入較多人力;崔冰艷等[5]采用蒙特卡洛法對菠蘿采摘機械手進行了工作空間分析,完成了菠蘿采摘機的改進設(shè)計;趙云偉等[6]設(shè)計了帶有柔性機械臂的多自由度果蔬采摘機械手,該機械手以氣動彎曲型柔性裝置為驅(qū)動器,可采摘多種果蔬,其缺點是對操作人員的技術(shù)水平要求較高;姬偉等[7]提出了一種果蔬采摘機器人抓取力矩的控制方法,可以有效減少采摘過程中機器人末端執(zhí)行器對果蔬的損壞;劉錚等[8]提出了一種可旋轉(zhuǎn)升降型履帶式果蔬采摘機構(gòu),可以完成大批量果蔬的采摘工作;孫意凡等[9]設(shè)計了一種果實采摘機器人,該機器人利用雙目立體視覺技術(shù)對果實進行識別并通過導(dǎo)航系統(tǒng)進行定位,可用于普通溫室的果實采摘。
綜上所述,現(xiàn)有菠蘿采摘機的數(shù)量較多且能夠進行大規(guī)模采摘,但是這些菠蘿采摘機普遍存在體型龐大、難以攜帶及小范圍采摘靈活性不強等問題,仍需進行改善設(shè)計。此外,目前我國絕大多數(shù)菠蘿果園仍采用分散栽培、分戶管理的生產(chǎn)模式[10],大型菠蘿采摘機械并不完全適用。因此,需設(shè)計一種實用、簡易且成本低的機械輔助半自動菠蘿采摘機[11]。
基于此,筆者提出了一種新型半自動擰取式菠蘿采摘收集機的設(shè)計方案,該采摘收集機采用太陽能供電模式,人工輔助采摘,能夠完成菠蘿的定位、采摘和收集等一系列動作。首先,對菠蘿采摘收集機的整體及關(guān)鍵部件進行設(shè)計與校核。然后,運用Solid-Works中的Motion模塊、Simulation模塊和MATLAB軟件,對菠蘿采摘收集機的剪式升降機構(gòu)、凸輪主軸和收集槽進行運動學(xué)分析和靜力學(xué)分析。最后,通過采摘收集試驗來驗證該采摘收集機的可行性。
1 菠蘿采摘收集機的結(jié)構(gòu)與工作原理
1.1 設(shè)計要求
菠蘿樹屬于多年生單子葉常綠草本果樹,矮生,莖短,葉多且絕大多數(shù)具有蓮座狀葉叢。以福建程溪菠蘿為例,多采用三行單株排列方式種植,即每畦種植3行菠蘿樹,畦內(nèi)菠蘿樹行距約為300 mm,畦面整體寬度約為1 100 mm,畦與畦之間留有寬度約為350 mm的土溝,畦長依據(jù)具體地形而定;菠蘿樹在畦長方向上的株距約為400 mm;菠蘿果實距地面約為500~700 mm。
根據(jù)上述菠蘿種植方式,參考國內(nèi)外菠蘿采摘機的設(shè)計經(jīng)驗,確定了適用于我國菠蘿采摘的作業(yè)形式。如圖1所示,本文設(shè)計的菠蘿采摘收集機整體采用龍門式結(jié)構(gòu),作業(yè)方式為“騎壟式”,采用“蛇形”行進路線,通過采摘機械手對菠蘿果實進行擰取式采摘。該菠蘿采摘收集機的驅(qū)動形式為手推式,其運動部件采用電力驅(qū)動,以由太陽能電池板充電的蓄電池作為動力源。

圖1 半自動擰取式菠蘿采摘收集機作業(yè)原理Fig.1 Operation principle of semi-automatic screw type pineapple picking-collecting machine
由菠蘿種植方式和菠蘿采摘作業(yè)形式可知,半自動擰取式菠蘿采摘收集機的具體設(shè)計要求如下:
1)采摘收集機龍門框架的寬度應(yīng)大于畦面寬度,高度應(yīng)高于菠蘿樹的高度;
2)采摘收集機采摘機械爪的高度應(yīng)具有可調(diào)性,調(diào)節(jié)范圍應(yīng)根據(jù)菠蘿果實距地面的高度范圍確定,以適應(yīng)高度參差不齊的菠蘿果實的采摘;
3)采摘收集機采摘機械爪應(yīng)有粗調(diào)和微調(diào)功能,以便快速定位菠蘿果實的位置;
4)采摘收集機應(yīng)有收集系統(tǒng),以減輕果農(nóng)的負擔(dān);
5)菠蘿地比較疏松,采摘收集機應(yīng)有特殊結(jié)構(gòu),以防止陷入。
基于上述設(shè)計要求,確定半自動擰取式菠蘿采摘收集機的設(shè)計參數(shù)如下:空載質(zhì)量約為100 kg,機身尺寸為1 690 mm×700 mm×1 300 mm,采摘機械爪的高度調(diào)節(jié)范圍為500~800 mm,最小轉(zhuǎn)彎半徑約為2 000 mm;前輪為萬向輪,后輪采用雙輪并排式結(jié)構(gòu)。
1.2 整機結(jié)構(gòu)
如圖2所示,半自動擰取式菠蘿采摘收集機主要由以下2個系統(tǒng)組成。
1)采摘系統(tǒng)。采摘系統(tǒng)主要用于完成對菠蘿果實的定位、采摘動作,包括升降機構(gòu)、爪臂平移機構(gòu)和采摘機械爪三個部分。
①升降機構(gòu)。采用X形一級剪式升降機構(gòu),利用其平行位移放大原理[12]實現(xiàn)采摘機械爪的高度調(diào)節(jié)。
②爪臂平移機構(gòu)。采用絲杠螺母機構(gòu)來實現(xiàn)采摘機械爪在X和Y方向上的移動,其中X方向的移動量較大,采用導(dǎo)程為15 mm的雙線滾珠絲杠(主絲杠)進行人工調(diào)節(jié);Y方向的移動量較小,采用導(dǎo)程為10 mm的雙線滾珠絲杠(副絲杠)進行調(diào)節(jié),由轉(zhuǎn)速為150 r/min的微型交流電機驅(qū)動。
③采摘機械爪。采用市場上常見的開合式機械爪作為采摘機械爪,其開合動作由微型舵機驅(qū)動,開合角度為0°~180°。安裝在爪臂平移機構(gòu)上的采摘機械爪有4個自由度,可實現(xiàn)在三維空間內(nèi)的位姿變換[13]。
2)收集系統(tǒng)。收集系統(tǒng)主要用于執(zhí)行對菠蘿果實的收集動作,由平底擺動凸輪、曲柄滑塊機構(gòu)和收集槽組合而成。
結(jié)合系統(tǒng)設(shè)計原理[14],使收集系統(tǒng)與采摘系統(tǒng)相互配合,依次完成相應(yīng)動作。
1.3 供電設(shè)計

圖2 半自動擰取式菠蘿采摘收集機結(jié)構(gòu)示意圖Fig.2 Structure diagram of semi-automatic screw type pineapple picking-collecting machine
半自動擰取式菠蘿采摘收集機的運動部件由電力驅(qū)動,選用蓄電池作為動力源,并采用太陽能電池板為蓄電池充電。在設(shè)計太陽能電池板和蓄電池容量時,在滿足采摘收集機日常所需電量的前提下,選用數(shù)量最少的太陽能電池板和蓄電池組合,以提升整體經(jīng)濟性。所選太陽能電池板的型號為XTL180-12,功率為180 W;蓄電池的型號為A412/90A。半自動擰取式菠蘿采摘收集機各電機的型號與功率如下:
1)驅(qū)動剪式升降機構(gòu)的直流推桿電機(2個)的型號為LX600,功率為30 W;
2)爪臂平移機構(gòu)中驅(qū)動副絲杠移動的微型交流電機的型號為51K40A-CF,功率為40 W;
3)驅(qū)動采摘機械爪旋轉(zhuǎn)的微型減速交流電機的型號為38GX3865-12V-30,功率為15 W;
4)驅(qū)動收集系統(tǒng)的小型齒輪減速電機的型號為51K60A-CF,功率為60 W。
半自動擰取式菠蘿采摘收集機的各電機并聯(lián),各電機獨立工作、互不影響,總功率P總=30×2+40+15+60=175W。
1.4 操作步驟
所設(shè)計的菠蘿采摘收集機主要面向不具備豐富機電知識的小規(guī)模種植戶,因此采用人工輔助操作的半自動設(shè)計,以達到簡化操作的目的。該半自動擰取式菠蘿采摘收集機的具體操作步驟為:
1)通過人工輔助推動采摘收集機移至需要采摘的菠蘿樹上端進行粗定位。
2)在完成粗定位后,首先調(diào)節(jié)爪臂平移機構(gòu),搖動手輪驅(qū)動主絲杠,使得采摘機械爪位于菠蘿果實上方;然后調(diào)節(jié)剪式升降機構(gòu)直至采摘機械爪下降至菠蘿果實附近后停止;最后按動微調(diào)開關(guān)進行位置微調(diào),使采摘機械爪接觸并夾緊菠蘿果實。
3)在采摘機械爪夾緊菠蘿果實后,按下啟動按鈕,通過電機驅(qū)動采摘機械爪進行旋轉(zhuǎn)動作,以開始采摘菠蘿果實。
4)在完成采摘后,利用平底擺動凸輪和曲柄滑塊組合機構(gòu)來調(diào)節(jié)采摘機械爪和收集槽進行聯(lián)動,采摘機械爪抬高至收集槽上端后松開,將菠蘿果實放入收集槽內(nèi),完成菠蘿果實的收集。
5)完成收集后,采摘機械爪復(fù)位,收集槽退回,人工推動采摘收集機移動下一個菠蘿果實上端。
如此重復(fù)循環(huán)上述步驟,完成菠蘿果實的采摘和收集。
2 菠蘿采摘收集機關(guān)鍵部件設(shè)計
2.1 采摘系統(tǒng)設(shè)計
2.1.1 升降機構(gòu)設(shè)計
在設(shè)計菠蘿采摘收集機升降機構(gòu)時,應(yīng)考慮質(zhì)量小、強度高、升降平穩(wěn)且拆卸更換方便等要求。基于上述要求,選用工程上廣泛使用的X形剪式升降機構(gòu),其結(jié)構(gòu)如圖3所示。剪式升降機構(gòu)的材料為APS-8-3030型工業(yè)鋁型材,長度為620mm,其獨特的截面結(jié)構(gòu)不僅使其具有較高的抗彎強度,而且能減小自身重力。菠蘿采摘收集機升降機構(gòu)由水平放置的直線推桿電機驅(qū)動,直線推桿電機的空載移動速度v=9mm/s,最大推力F=3000N。

圖3 X形剪式升降機構(gòu)三維結(jié)構(gòu)示意圖Fig.3 3D structure diagram of X-shaped scissor lifting mechanism
X形剪式升降機構(gòu)的運動簡圖如圖4所示,其運動過程可以看作:直線推桿電機推動滑塊4沿X方向移動,使得構(gòu)件2和構(gòu)件3同時繞B點擺動,進而帶動構(gòu)件1沿Y方向移動。因構(gòu)件2與構(gòu)件1的右側(cè)端點始終重合于A點,由X形剪式升降機構(gòu)的結(jié)構(gòu)對稱性可知,當(dāng)構(gòu)件1作平面運動時,其上任意一點的運動特性均相同,故可用A點的運動特性來描述構(gòu)件1的運動特性。

圖4 X形剪式升降機構(gòu)運動簡圖Fig.4 Movement diagram of X-shaped scissor lifting mechanism
1)位移分析。
如圖4所示,以C點為原點,DC為X軸建立直角坐標(biāo)系。構(gòu)建矢量三角形CAB,對剪式升降機構(gòu)進行位移分析,可得:

式中:lCB表示B點相對于C點的位移;lCA表示A點相對于B點的位移;lCA表示A點相對于C點的位移。
由圖4中的幾何關(guān)系可得:
式中:lCB表示B點相對于C點位移的大小;lBA表示A點相對于B點位移的大小;lCA表示A點相對于C點位移的大小;α表示X軸與構(gòu)件3之間的夾角;L表示構(gòu)件3的長度。
2)速度分析。
構(gòu)件2作平面運動,由基點法[15]可得:

式中:vA表示A點的速度;vD表示D點的速度;vAD表示A點相對于D點的速度。
vA的大小未知,方向垂直于X軸;vD的大小為9 mm/s,方向垂直于Y軸;vAD的大小未知,方向垂直于構(gòu)件2。
根據(jù)速度投影定理可得:
由此解得:

由于vAD=LωAD,可得:

式中:vA表示A點速度的大小;vD表示D點速度的大小;vAD表示A點相對于D點速度的大小;ωAD表示構(gòu)件2角速度的大小。
3)加速度分析。
構(gòu)件2作平面運動,由基點法可得:

式中:aA表示A點的加速度;aD表示D點的加速度;表示A點繞D點轉(zhuǎn)動的法向加速度;表示A點繞D點轉(zhuǎn)動的切向加速度。
aA的大小未知,方向垂直于X軸;由于vD為常量,則aD的大小為0 mm/s2;的大小為,方向沿構(gòu)件2方向;的大小未知,方向垂直于構(gòu)件2。
將各加速度沿平行于構(gòu)件2方向投影,可得:

則可得:

為更清楚地表示圖4中構(gòu)件2上A點的運動特性,利用SolidWorks軟件中的Motion模塊繪制A點的運動特性曲線,如圖5所示。由圖5可知,X形剪式升降機構(gòu)的工作過程較為穩(wěn)定,雖然其加速度曲線存在“尖點”,有一定的柔性沖擊,但沖擊極小,滿足工作要求。

圖5 X形剪式升降機構(gòu)的運動特性曲線Fig.5 Movement characteristics curves of X-shaped scissor lifting mechanism
2.1.2 爪臂平移機構(gòu)設(shè)計
采摘機械爪沿X、Y方向的移動由絲杠螺母機構(gòu)來實現(xiàn),其中主絲杠由人工手搖驅(qū)動,副絲杠由微型交流電機驅(qū)動,移動平臺采用環(huán)氧板。為節(jié)省空間,副絲杠與微型交流電機通過傳動比為1∶1的傳動鏈連接。爪臂平移機構(gòu)的結(jié)構(gòu)簡圖如圖6所示。
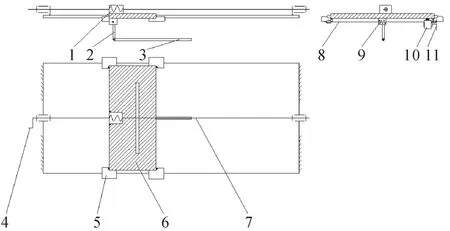
圖6 爪臂平移機構(gòu)的結(jié)構(gòu)簡圖Fig.6 Structure diagram of claw arm translation mechanism
2.1.3 采摘機械爪設(shè)計
所設(shè)計的菠蘿采摘收集機的采摘方式為擰取式。安裝在爪臂平移機構(gòu)上的采摘機械爪采用開合式機械爪,同時將轉(zhuǎn)速為30 r/min的微型減速交流電機與采摘機械爪相連,通過微型減速交流電機的轉(zhuǎn)動來帶動采摘機械爪轉(zhuǎn)動,從而實現(xiàn)采摘動作。
在選取采摘機械爪時,為了簡化設(shè)計,降低加工成本,選擇成品機械爪(質(zhì)量為186 g)。該機械爪的開合角度為0°~180°,可用于夾取形狀、大小不同的菠蘿果實。采摘機械爪與菠蘿果實接觸的部位呈柵欄狀,這既減小了機械爪的自重,又可與菠蘿果實外部紋理相配合以加大夾緊力。采摘機械爪的結(jié)構(gòu)及尺寸如圖7所示。

圖7 采摘機械爪的結(jié)構(gòu)及尺寸Fig.7 Structure and size of picking mechanical claw
2.2 收集系統(tǒng)設(shè)計
2.2.1 總體結(jié)構(gòu)設(shè)計
由于菠蘿的莖比較粗且其葉子大而密,為防止菠蘿的莖和葉子對菠蘿果實的收集造成影響,設(shè)計的收集槽必須高于菠蘿莖。在采摘收集菠蘿果實時,先利用采摘機械爪將菠蘿果實從其莖上擰斷,再通過各機構(gòu)間的相互配合運動將擰下的菠蘿果實抬高后放入收集槽中。為了實現(xiàn)上述過程,采用“凸輪機構(gòu)+曲柄滑塊機構(gòu)”組合,通過嚴(yán)格的相位配合,保證采摘動作和收集動作互不干涉。選用51K60A-CF型小型齒輪減速電機作為收集系統(tǒng)的主電機,其轉(zhuǎn)速為10r/min,容許轉(zhuǎn)矩為19.6N?m;通過鏈傳動將電機動力傳遞給凸輪主軸。收集系統(tǒng)的結(jié)構(gòu)簡圖如圖8所示。

圖8 收集系統(tǒng)的結(jié)構(gòu)簡圖Fig.8 Structure diagram of collection system
2.2.2 凸輪機構(gòu)設(shè)計
以凸輪為定標(biāo)件,設(shè)計收集系統(tǒng)的運動規(guī)律,如圖9所示。

圖9 收集系統(tǒng)的運動循環(huán)Fig.9 Motion cycle of collection system
收集系統(tǒng)的凸輪選用平底擺動凸輪[16],其在工作過程中的壓力角始終為0°,極大地提高了傳動效率。根據(jù)采摘設(shè)計要求,得到了平底擺動凸輪的設(shè)計參數(shù)(見表1),再結(jié)合擺桿的運動規(guī)律,可反推出該凸輪的輪廓曲線,如圖10所示。
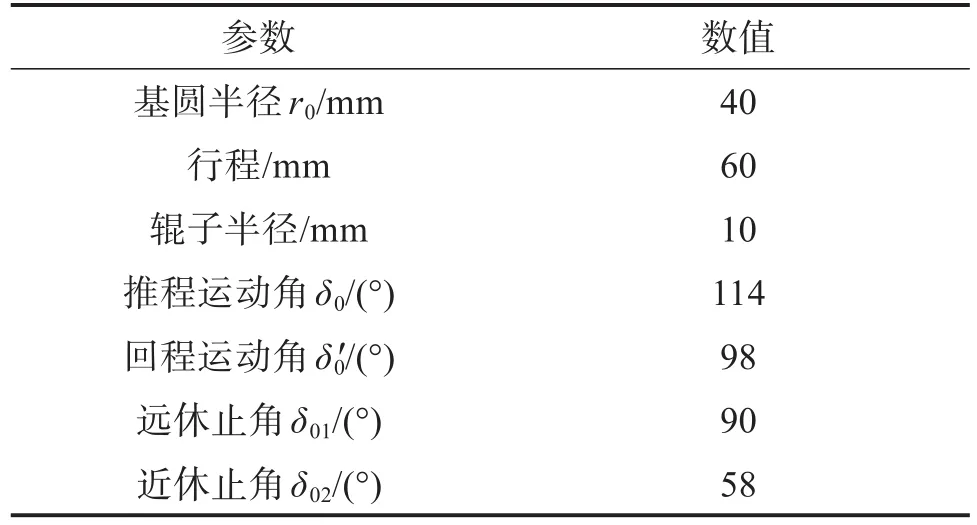
表1 平底擺動凸輪的設(shè)計參數(shù)Table 1 Design parameters of flat-bottomed oscillating cam

圖10 平底擺動凸輪的輪廓曲線Fig.10 Contour curve of flat-bottomed oscillating cam
利用SolidWorks軟件對平底擺動凸輪的主軸進行三維實體建模,定義主軸的材料屬性為:材料為45#鋼,密度ρ=7.8×103kg/m3,彈性模量E=2.1×1011Pa,泊松比λ=0.28,屈服強度σs≥355MPa,抗拉強度σb≥600MPa,伸長率δs=16%,斷面收縮率ψ=40%。鑒于凸輪主軸在轉(zhuǎn)動過程中主要承受轉(zhuǎn)矩作用,對其施加扭矩載荷后進行網(wǎng)格劃分,建立如圖11所示的有限元模型。利用Simulation模塊對平底擺動凸輪主軸進行靜力學(xué)分析,得到主軸在受載時的應(yīng)力、位移、應(yīng)變分布規(guī)律[17]。為真實反映主軸的變形情況,將變形比例因子設(shè)為1,結(jié)果如圖12所示。
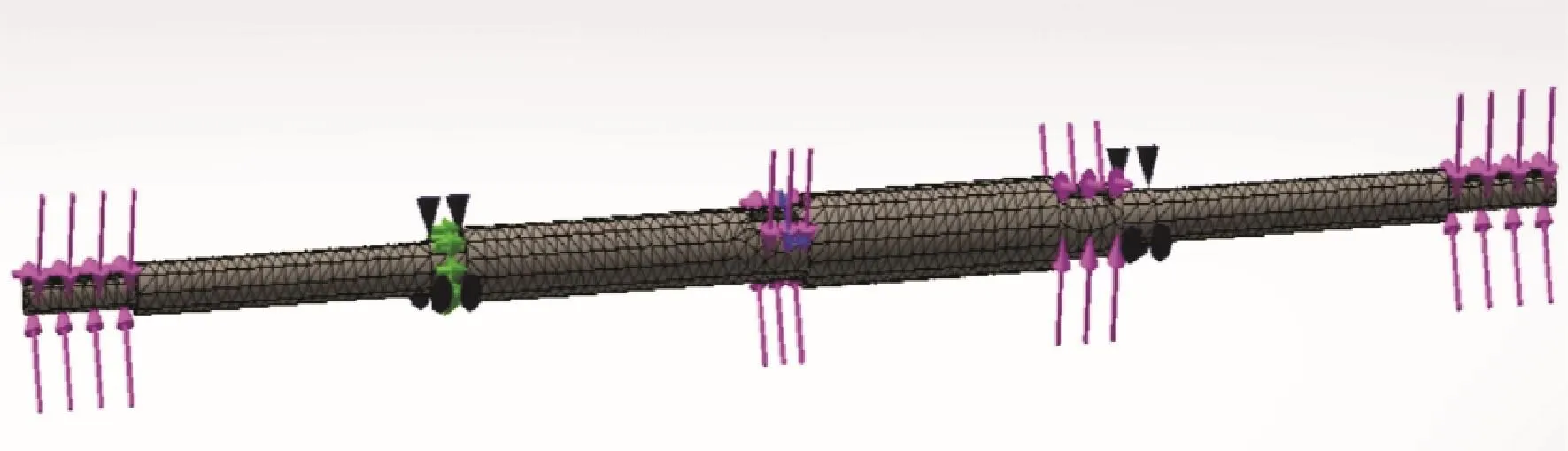
圖11 平底擺動凸輪主軸有限元模型Fig.11 Finite element model of flat-bottomed oscillating cam spindle

圖12 平底擺動凸輪主軸靜力學(xué)分析結(jié)果Fig.12 Static analysis results of flat-bottomed oscillating cam spindle
由圖12可知,在加載扭矩載荷的情況下,平底擺動凸輪主軸的最大應(yīng)力為75.44 MPa,遠小于其屈服極限,滿足工作要求。同時,凸輪主軸的最大位移為0.36 mm,最大應(yīng)變?yōu)?.06×10-4,亦滿足工作要求[18-19]。
2.2.3 曲柄滑塊機構(gòu)設(shè)計
曲柄滑塊機構(gòu)是收集系統(tǒng)的關(guān)鍵部件。為了使收集槽和采摘機械爪實現(xiàn)聯(lián)動且互不干涉,令滑塊的行程為180 mm;考慮到系統(tǒng)空間結(jié)構(gòu)限制以及凸輪主軸與爪臂平移機構(gòu)的位置關(guān)系,確定曲柄滑塊機構(gòu)的偏距e=415 mm;為了使收集槽在回程時能夠快速退回,令曲柄滑塊機構(gòu)的行程速比系數(shù)Kc=1.2,由此可得其極位夾角θ為[14]:

利用Auto CAD軟件,按給定行程速比系數(shù)設(shè)計曲柄滑塊機構(gòu),設(shè)計原理如圖13所示。
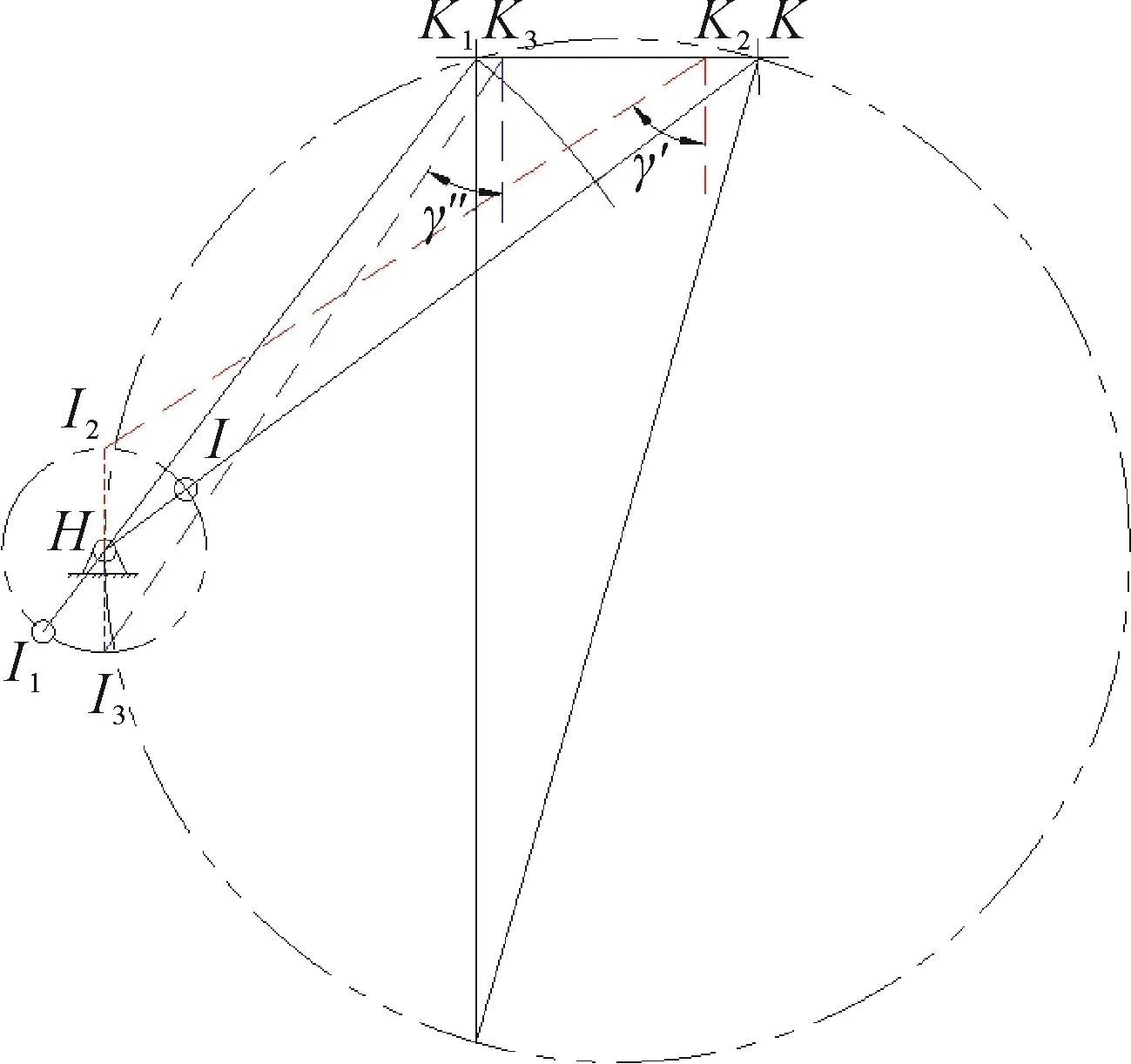
圖13 曲柄滑塊機構(gòu)設(shè)計原理Fig.13 Design principle of crank slider mechanism
根據(jù)分析可知,當(dāng)曲柄位于圖13所示的I2或I3處時,曲柄滑塊機構(gòu)的傳動角最小。利用Auto CAD軟件中的測量工具測量曲柄和連桿的實際長度,以對曲柄滑塊機構(gòu)的最小傳動角進行校核。經(jīng)測量得:曲柄長度r=89 mm,連桿長度l=748 mm,計算可得曲柄滑塊機構(gòu)的最小傳動角γmin=36°。由于曲柄滑塊機構(gòu)的受力較小,該最小傳動角能保證其傳力性能良好[14],滿足工作要求。
2.2.4 收集槽運動學(xué)分析
通過上述分析計算,得到曲柄滑塊機構(gòu)的設(shè)計參數(shù),如表2所示。

表2 曲柄滑塊機構(gòu)設(shè)計參數(shù)Table 2 Design parameters of crank slider mechanism
曲柄滑塊機構(gòu)的運動簡圖如圖14所示。鑒于收集槽固結(jié)在滑塊上,為了簡化分析,將收集槽轉(zhuǎn)化為滑塊上的點K進行研究。采用復(fù)數(shù)矢量法對曲柄滑塊機構(gòu)進行運動分析,以得到收集槽的運動特性。當(dāng)曲柄滑塊機構(gòu)運動至如圖14所示位置時,以H點為原點建立直角坐標(biāo)系,其中桿HI表示曲柄,桿IK表示連桿,曲柄方位角θ1和連桿方位角θ2均定義為從X軸開始沿順時針方向為正。

圖14 曲柄滑塊機構(gòu)的運動簡圖Fig.14 Motion diagram of crank slider mechanism
1)位移分析。
根據(jù)復(fù)數(shù)矢量法,得到曲柄滑塊機構(gòu)位移的封閉矢量方程:

式中:lHI表示I點相對于H點的位移;lIK表示K點相對于I點的位移;le表示H點相對于K點的垂直位移;XK表示K點相對于H點的水平位移。
將式(4)改寫并表示為復(fù)數(shù)矢量形式:

式中:lHI表示曲柄的長度;lIK表示連桿的長度;XK表示K點相對于H點的水平位移的大小。
應(yīng)用歐拉公式eiθ=cosθ+isinθ將式(5)的實部和虛部分離,可得:

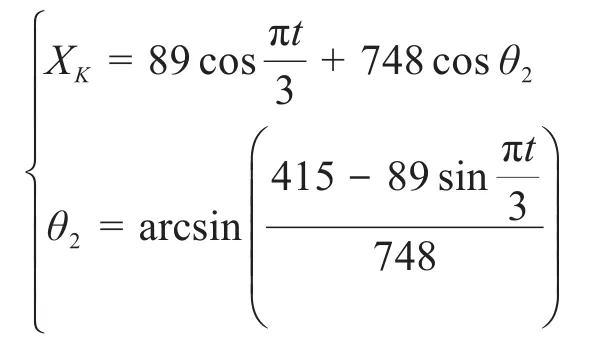
通過求解式(6)可得:

將式(8)及l(fā)HI=r=89mm,lIK=l=748mm,e=415mm代入式(7),解得:
2)速度分析。
連桿作平面運動,由基點法得:

式中:vK表示K點的速度;vI表示I點的速度;vKI表示K點相對于I點的速度。
vK的大小未知,方向垂直于Y軸;vI的大小為ωr,方向垂直于曲柄;vKI的大小未知,方向垂直于連桿。
將各速度沿平行于Y軸方向投影,可得:

由此可解得:

式中:vK表示K點速度的大小;vI表示I點速度的大小;vKI表示K點相對于I點的速度的大小;ωKI表示連桿角速度的大小。
將各速度沿平行于連桿方向投影,可得:
3)加速度分析。
由基點法得出點K的加速度:

式中:aK表示K點的加速度;aI表示I點的加速度;表示K點繞I點轉(zhuǎn)動的法向加速度;表示K點繞I點轉(zhuǎn)動的切向加速度。
aK的大小未知,方向垂直于Y軸;aI的大小為ω2r,方向沿曲柄指向H;的大小為,方向沿連桿指向I;的大小未知,方向垂直于連桿。
將各加速度沿平行于連桿方向投影,可得:

解得:
式中:aK表示K點加速度的大小;aI表示I點加速度的大小。
將具體參數(shù)代入式(12)后可得:

為了更清楚地分析曲柄滑塊機構(gòu)的運動特性,利用MATLAB軟件繪制一個工作循環(huán)內(nèi)收集槽的運動特性曲線[20],如圖15所示。同時,借助計算機分析技術(shù),求解收集槽在各時刻的位移、速度和加速度,結(jié)果如表3所示。
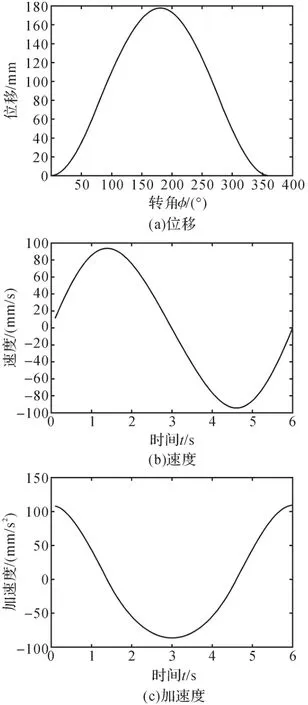
圖15 收集槽的運動特性曲線Fig.15 Motion characteristics curves of collecting tank

表3 不同時刻下收集槽的位移、速度和加速度Table 3 Displacement,velocity and acceleration of collecting tank at different times
由圖15可以看出,半自動擰取式菠蘿采摘收集機的收集槽可以實現(xiàn)預(yù)期規(guī)劃的運動軌跡,運動平穩(wěn)性好,無劇烈振動現(xiàn)象,能滿足工作要求。
3 菠蘿采摘收集試驗
本文設(shè)計的半自動擰取式菠蘿采摘收集機的樣機如圖16所示。為了驗證該菠蘿采摘收集機的工作穩(wěn)定性和可靠性,進行了菠蘿采摘收集試驗。在實驗室條件下模擬菠蘿的種植方式,進行一系列重復(fù)隨機試驗,采摘收集試驗現(xiàn)場如圖17所示。設(shè)置以采摘收集5,10,15個菠蘿果實為目標(biāo)的3組試驗,每組采摘收集試驗均隨機重復(fù)5次,利用計時器記錄每次試驗的采摘收集時間,并計算采摘收集效率和采摘收集效率方差,結(jié)果如表4所示。

圖16 半自動擰取式菠蘿采摘收集機樣機Fig.16 Prototype of semi-automatic screw type pineapple picking-collecting machine

圖17 菠蘿采摘收集試驗現(xiàn)場Fig.17 Pineapple picking and collecting test site
由試驗結(jié)果可知,每組采摘收集試驗的最大時間差均不超過8 s,平均采摘收集效率可達17.99 s/株;部分菠蘿果實的采摘作業(yè)需執(zhí)行多次操作,平均采摘成功率為75.3%;在不同采摘規(guī)模下,采摘收集效率方差最大為0.070(s/株)2。結(jié)果表明該半自動擰取式菠蘿采摘收集機操作簡單,工作性能穩(wěn)定,可完成菠蘿果實的采摘、收集等基本功能。
4 結(jié) 論
1)針對我國傳統(tǒng)菠蘿采摘作業(yè)中存在的勞動強度大、采摘效率低、采摘成本高以及采摘機械化程度低等問題,設(shè)計了一種由太陽能供電的半自動擰取式菠蘿采摘收集機,該采摘機將菠蘿的采摘和收集融為一體,可有效解決上述問題。
2)借助SolidWorks和MATLAB等軟件,建立了半自動擰取式菠蘿采摘收集機總體結(jié)構(gòu)和關(guān)鍵部件的三維實體模型,并對剪式升降機構(gòu)、凸輪主軸和收集槽進行了運動學(xué)分析和靜力學(xué)分析,提高了設(shè)計質(zhì)量,縮短了設(shè)計周期,降低了設(shè)計成本,這可為今后相關(guān)產(chǎn)品的設(shè)計與優(yōu)化提供一定指導(dǎo)。
3)菠蘿采摘收集試驗結(jié)果表明,該半自動擰取式菠蘿采摘收集機的操作簡單,性能穩(wěn)定,且具有小巧輕便、靈活性高等特點,可供小規(guī)模種植戶、地況復(fù)雜的丘陵山區(qū)等種植戶以及無法使用大型采摘機械大棚種植戶等使用。同時,該采摘收集機自帶收集槽,可使果農(nóng)不用背負沉重的籮筐,減輕了其負擔(dān)。此外,考慮到現(xiàn)階段我國絕大多數(shù)果農(nóng)的經(jīng)濟水平較低,并不具備豐富的機電知識,故在設(shè)計時盡量降低了機器成本,簡化了機器操作系統(tǒng)。
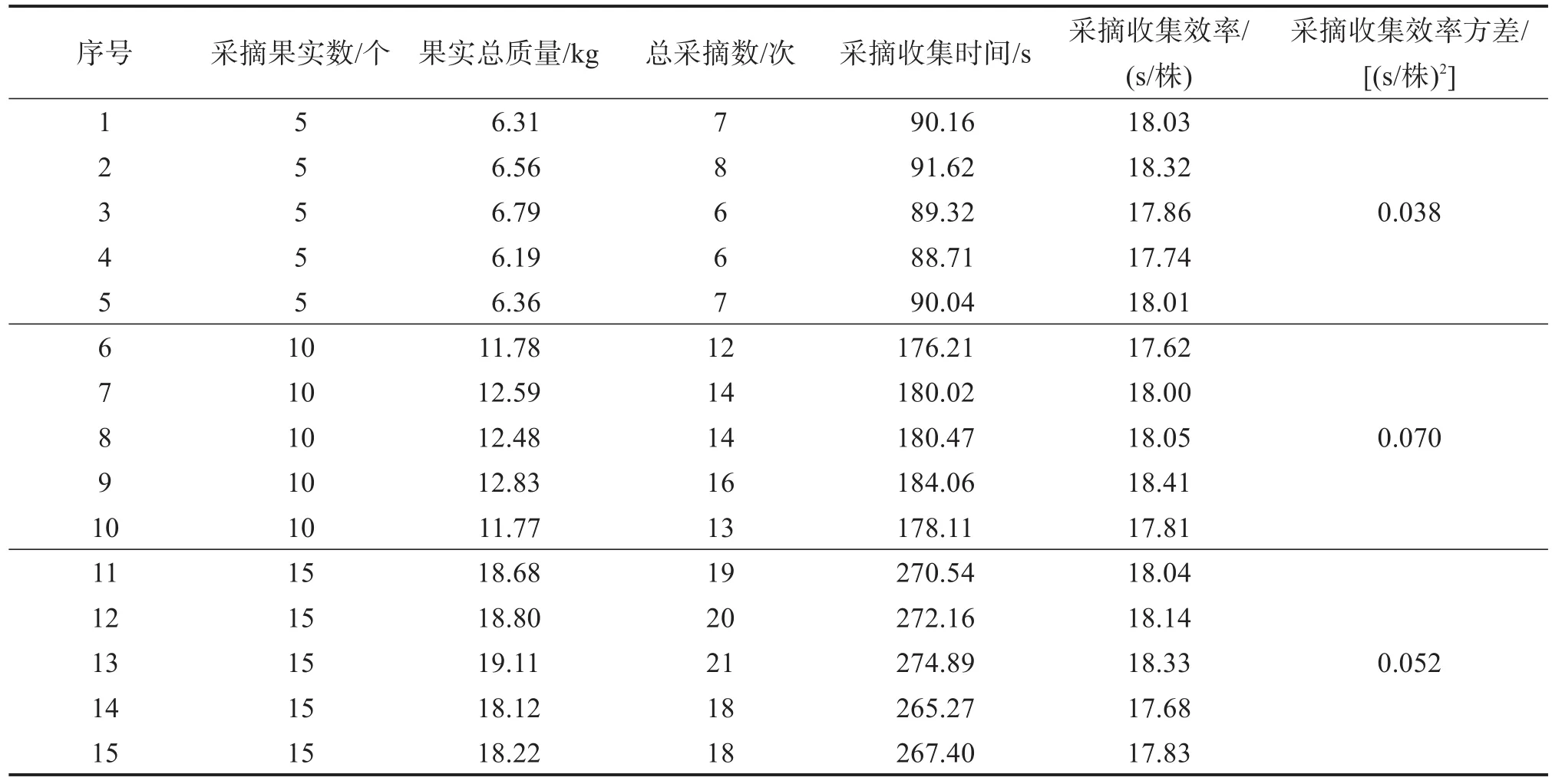
表4 菠蘿采摘收集試驗結(jié)果Table 4 Results of pineapple picking and collecting test
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09