基于串聯(lián)校正原理的LTI 系統(tǒng)校正實(shí)驗(yàn)綜述報(bào)告
2020-09-24 03:24:36郭凱
科技視界 2020年26期
關(guān)鍵詞:實(shí)驗(yàn)系統(tǒng)
郭 凱
0 引言
自動(dòng)控制原理課程中控制系統(tǒng)的校正一章是建立上一章頻率特性的基礎(chǔ)上的,理論公式推導(dǎo)較多、難度較大且所占的篇幅較多,所以通過實(shí)驗(yàn)的方式驗(yàn)證所學(xué)的內(nèi)容極為重要,系統(tǒng)校正分為串聯(lián)校正、反饋校正、復(fù)合校正,其中串聯(lián)校正憑借結(jié)構(gòu)簡(jiǎn)單,參數(shù)易調(diào)節(jié),設(shè)計(jì)難度小等優(yōu)點(diǎn)得到廣泛運(yùn)用,串聯(lián)校正又分為串聯(lián)超前校正、串聯(lián)滯后校正、串聯(lián)滯后超前校正,都是基于PID 校正原理,用于改善系統(tǒng)的動(dòng)態(tài)和穩(wěn)態(tài)性能,其中的串聯(lián)超前校正與PD 校正效果類似,可以改善系統(tǒng)的動(dòng)態(tài)性能,在實(shí)驗(yàn)過程中設(shè)計(jì)的電路較為簡(jiǎn)單,實(shí)物搭建及結(jié)果觀察也易于操作,通過MATLAB 仿真對(duì)所作的結(jié)果進(jìn)行驗(yàn)證,整個(gè)過程易于理解和觀察分析,對(duì)此環(huán)節(jié)的理論知識(shí)有更深入的理解及應(yīng)用也對(duì)后續(xù)課程有所幫助。
1 實(shí)驗(yàn)內(nèi)容安排
1.1 串聯(lián)超前校正實(shí)驗(yàn)原理
在原系統(tǒng)中串聯(lián)一個(gè)環(huán)節(jié),原系統(tǒng)的環(huán)節(jié)稱為固有系統(tǒng)傳遞函數(shù)為G0(S),校正環(huán)節(jié)傳遞函數(shù)為Gk(S),設(shè)串聯(lián)超前校正裝置傳遞函數(shù)且T1>T2通過頻率特性分析低頻段沒有提供積分環(huán)節(jié)且比例系數(shù)為1 即v=0、k=1,由穩(wěn)態(tài)誤差分析得出穩(wěn)態(tài)誤差只與系統(tǒng)的輸入R(S)和結(jié)構(gòu)有關(guān),所以穩(wěn)態(tài)性能沒有改變,在中頻段中L(ω)提供正斜率且校正角度φ(ωk)>0,使校正后的相穩(wěn)定裕量 酌上升從而導(dǎo)致ξ 上升最后使超調(diào)量σ%下降,達(dá)到改善系統(tǒng)動(dòng)態(tài)性能的作用,高頻段中L(ω)>0 使高頻段抬高,使抗干擾性能稍微下降。在PID 校正原理里類似于PD 校正。
1.2 實(shí)驗(yàn)設(shè)計(jì)

圖1 校正前的電路模擬圖
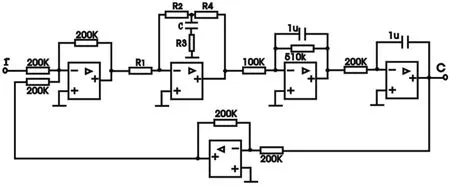
圖2 校正后的電路模擬圖
1.3 仿真驗(yàn)證
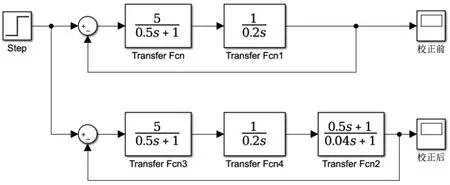
圖3 系統(tǒng)仿真結(jié)構(gòu)圖
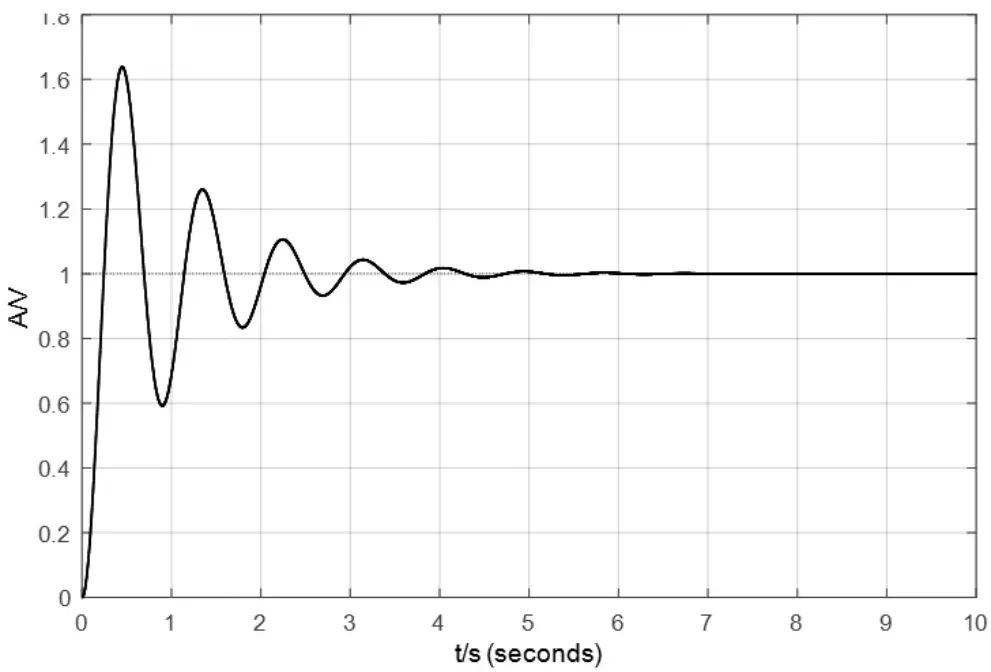
圖4 系統(tǒng)校正前階躍響應(yīng)曲線
為了避免線路搭建的錯(cuò)誤或元器件損壞而導(dǎo)致數(shù)據(jù)的失真,通過MATLAB 仿真里的Simulink 模塊對(duì)實(shí)驗(yàn)結(jié)果進(jìn)行驗(yàn)證,系統(tǒng)仿真結(jié)構(gòu)圖如圖3 所示。
通過仿真結(jié)果得出校正前階躍響應(yīng)曲線如圖4 所示,系統(tǒng)校正后階躍響應(yīng)曲線如圖5 所示。

圖5 系統(tǒng)校正后階躍響應(yīng)曲線
由仿真曲線圖4 和圖5 可以看出,校正前后的超調(diào)量σ%由63%降低到了18%,調(diào)節(jié)時(shí)間ts由3 秒降低到了0.6 秒且波動(dòng)減小,設(shè)計(jì)的超前校正裝置可以改善系統(tǒng)的動(dòng)態(tài)性能。
2 實(shí)驗(yàn)總結(jié)
本實(shí)驗(yàn)的主要為了讓學(xué)生充分了解串聯(lián)校正的基本原理及如何設(shè)計(jì)校正環(huán)節(jié)及所對(duì)應(yīng)的實(shí)物,在此原理的基礎(chǔ)上,通過理論設(shè)計(jì)、實(shí)物搭建,仿真驗(yàn)證在實(shí)際應(yīng)用時(shí)碰到的問題及應(yīng)考慮的部分問題,掌握串聯(lián)超前校正構(gòu)成及特點(diǎn),實(shí)驗(yàn)電路模擬圖并不復(fù)雜,學(xué)生搭建連接問題不大,難點(diǎn)是輸入和輸出波形的調(diào)試和讀取,以及MATLAB 程序編寫和Simulink 系統(tǒng)搭建、參數(shù)調(diào)整和實(shí)驗(yàn)誤差的成因?qū)ふ遥饕獊碜赃\(yùn)算放大器的動(dòng)態(tài)誤差、階躍信號(hào)源和虛擬示波器的使用不熟練造成的誤差以及學(xué)生的種種操作不當(dāng)引起的誤差。此實(shí)驗(yàn)并不難,但需要學(xué)生在實(shí)驗(yàn)后總結(jié)串聯(lián)超前校正的頻率特性及各頻段對(duì)應(yīng)系統(tǒng)的動(dòng)態(tài)性能,加深此內(nèi)容的印象,使后面學(xué)到的滯后校正和滯后超前校正以及PID 校正規(guī)律有更好的學(xué)習(xí)基礎(chǔ),以便以后能夠設(shè)計(jì)更好地滿足各部分性能要求的校正系統(tǒng)。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
