海洋應急指揮機動通信組網系統中多模融合無線通信技術研究
2020-09-18 07:12:22許志強
全球定位系統 2020年4期
關鍵詞:信息
許志強
(青島杰瑞自動化有限公司,山東 青島 266061)
0 引 言
在應對海上突發事件時,相關部門常常需要通過部署空中、水面、水下的各種載體實現事發現場的各種信息采集,為后續指揮、調度、決策和預判提供可靠信息來源.
如何有效地在海洋各種平臺之間實現海洋各種信息要素的快速、實時通信成為關鍵問題.隨著衛星通信及其他多種無線通信技術的快速發展,在海洋多平臺之間搭建實時、可靠、無縫的、窄帶與寬帶通信結合的無線數據傳輸鏈路是多年以來炙手可熱的研究課題.
海洋無人平臺的數據傳輸方式從短波通信、到依賴基于Argos、Inmarsat-C 系統的衛星通信終端進行通信,有著顯著而卓越的進步,但是所用到的Argos 和 Inmarsat-C系統由于使用費較高而限制了其使用.近年來,銥星通信系統逐步普及,缺點是實時性差.中國的北斗衛星導航系統(BDS)作為覆蓋有源三維衛星定位及實時通信系統,實現了全球覆蓋,中國的天通衛星通信系統覆蓋整個亞太地區,實現了該地區大范圍的實時語音與數字通信,這兩種衛星通信技術逐漸成為現代海洋無人平臺通信手段的重要選擇.
本文敘述的海洋無人平臺采用完全自主可控的通信組件構建多模融合的無線通信鏈路,采用智能通信網關對無線通信鏈路進行路由智能控制,實現了機動部署的無人平臺與水面母船、無人艇、空中無人機、水下航行器之間的雙向實時、可靠、無縫的、窄帶與寬帶通信結合的無線通信鏈接的目標.
1 系統結構和原理
當前,海洋多平臺機動通信組網不斷向著功能專用化和組網方式多樣化的趨勢蓬勃發展.本文圍繞系統組網、智能通信網關控制技術、低功耗控制技術方案等問題,給出系統的解決方案.
1.1 海洋應急指揮機動組網通信系統概述
海洋無人浮標平臺、母船、無人艇、無人機、通信衛星、遙感衛星、地面端數據中心及水下運動載體等能組成一個完整的海洋應急指揮機動通信組網系統.系統組成如圖1所示.

圖1 完整的海洋應急指揮機動通信組網系統
機動部署海洋無人平臺作為連接空中、水面與水下的關鍵信息節點,為了將水下載體與岸基數據中心的通信鏈路可靠貫通,在海洋無人平臺上安裝天通衛星通信組件、北斗短報文通信組件、無線網絡網格、遠距離無線電、超短波通信組件、WiFi通信組件、水聲通信組件、光通信及電磁耦合通信組件等.
上述海洋應急指揮機動通信組網系統的上行通信鏈路是:預警信息、水文特征信息和水聲原始數據等通過水聲通信、光通信和電磁耦合通信鏈路,傳輸到海洋無人平臺,海上無人平臺再通過三種不同的通信鏈路發送給不同的水上及陸空目標,第一種是通過無人平臺上的MESH、LORA、超短波通信鏈路把信息發送到母船,再由母船上的衛星通信鏈路發送到岸基數據中心;第二種是通過MESH、LORA、超短波、WiFi通信鏈路把信息發送到空中無人機和無人艇,再由母船回收無人機無人艇后,通過母船衛星通信鏈路發送到岸基數據中心;第三種是直接通過天通衛星通信、北斗短報文通信鏈路發送到岸基數據中心.完成數據的上行(水下載體→無人平臺→岸站)傳輸.其中光通信、MESH和WiFi通信鏈路可以傳輸較大量信息,其他鏈路傳輸少量關鍵信息.岸基數據中心到水下載體的下行通信鏈路與上述鏈路相反.
上述各種通信方式的傳輸性能如表1所示.

表1 多種通信方式傳輸性能對比表
海洋無人平臺選擇上述通信方式,就是綜合考慮了每種通信方式在帶寬、傳輸距離、經濟成本等方面的互補性.
水上部分,天通衛星通信鏈路適用于水面上遠距離傳輸,可傳輸較大量的數據信息和語音信息;北斗短報文鏈路適用于水面上遠距離傳輸,可傳輸小量的預警信息和控制指令;MESH通信鏈路可在水面上幾千米到幾十千米范圍內傳輸圖像、語音等信息;超短波、LORA通信鏈路可在水面上幾千米范圍內傳輸中等量的數據信息;WiFi天線鏈路可在水面上短距離內傳輸大量的圖像、語音、水文氣象等信息.
水下部分,水聲通信、光通信和電磁耦合通信用于水下通信,水下載體的位置信息、狀態信息等可通過水聲通信鏈路在數千米范圍內傳輸到海洋.無人平臺完成出水鏈路;水下移動載體采集的大量海洋環境信息可在短距離范圍內通過光通信、電磁耦合通信鏈路傳輸到海洋無人平臺完成出水鏈路.
無人平臺的通信系統包括天通衛星通信組件、北斗短報文組件、LORA組件、MESH組件、光通信組件、電磁耦合通信組件、超短波通信組件、WiFi通信組件及水聲通信組件等,這些通信鏈路統一由智能通信網關進行管理和操控,實現向岸基數據中心發送水文信息和預警信息、接收來自衛星的遙控指令、接收北斗短消息和定位授時信息[1]、水下載體進行水聲、光和電磁耦合通信等功能,如圖2 所示.
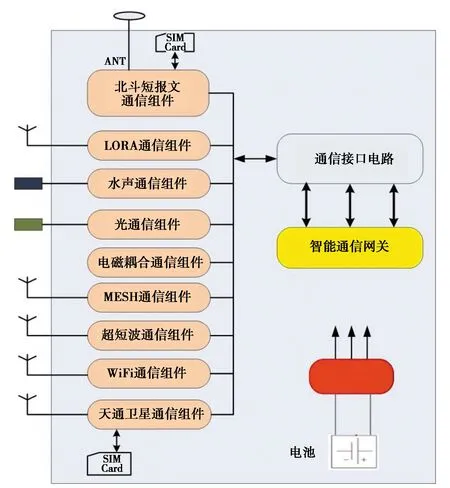
圖2 無人平臺通信系統組成
1.2 網絡體系結構
海洋應急指揮機動通信組網系統采用主動網絡,又稱為可編程網,是一種新的網絡體系結構,和傳統網絡有著很大的不同,傳統網絡僅負責在終端和系統之間轉發數據,并不改變其內容,而主動網絡則加入了網絡內部的計算和處理功能,智能網關設備通過定制化的程序可以對通過它的用戶數據進行分析計算,而不僅僅是被動地轉發,從而提高了網絡的交互能力.
海洋機動通信組網需采用主動網絡以具備可編程定制的能力,同時還必須根據組網決策的不同確定基本網絡結構圖,一般情況下海洋機動通信組網通信網采用分層分布式組網[2],這種網絡是分多層結構的,在同一層結構中所有節點的地位都相同.分層節點之間采用完全分布式的方式,其結構如圖3所示.

圖3 分層分布式分群網絡結構圖
隨著海洋應急指揮機動通信組網系統中節點的不斷移動和變化,建立的通信路徑也會不斷變化,如果網絡中的源節點和目的節點之間存在著多條可用的通信路徑,就會存在路徑選擇的問題.主動網絡可以選擇適當的路由來獲得較好的網絡特性,圖2中的虛線箭頭表示的是網絡在原來的通信路徑破壞后再選擇建立的通信路徑.采用基于多維度信息交互算法[3]的智能網關技術實現主動網絡的路由選擇.
1.3 智能通信網關技術
1.3.1 概述
智能通信網關是海洋無人平臺中的核心組件,它可以在各種網絡協議間做報文轉換,能夠完整地解析出報文的內容,并且智能地將它轉換為另一種協議,智能通信網關起到了核心的信息處理與橋接、鏈路管控和功耗管理的作用.
通過系統提供的組態配置參數,可以設定不同物理通道上運行的通信協議進行數據采集,對要采集的數據設備的物理地址、通道地址或者參數名稱等,能夠自主設定. 對于已采集到設備中的數據,網關運行程序能夠以各種方式進行操作,包括:數據變換、數據過濾、運算處理、歷史數據存儲、統計處理、報警處理、服務請求等. 對于已處理好的數據,網關運行程序能夠按照已組態配置好的方式,包括物理連接方式、數據轉發協議類型、站物理地址、轉發數據通道地址或者參數名稱等,將數據轉發至岸基數據中心.
平臺上電后,智能通信網關自動對水聲通信組件、北斗短報文組件、LORA組件、MESH組件、光通信組件、電磁耦合通信組件、超短波通信組件、WiFi通信組件及天通衛星通信組件等進行自檢,識別各個組件的工作狀態,通過對各個通信鏈路的信號狀態和信號強度的監測,采用通信信道智能控制技術,自動選擇最佳通信鏈路,確保局域及遠程通信的暢通.同時,采用數據壓縮加密算法對傳輸數據進行處理,確保數據安全、高效地傳輸,采用通信帶寬動態控制技術,確保通信的連續可靠.電源模塊提供輸入電源轉換后的二次電源,供給各個模塊,確保平臺正常工作.
1.3.2 智能通信網關的技術原理
智能通信網關的技術原理如圖4所示.

圖4 智能通信網關技術原理控制方法
智能通信網關實時監測天通衛星通信組件、北斗短報文組件、LORA組件、MESH組件、光通信組件、電磁耦合通信組件、超短波通信組件、WiFi通信組件及水聲通信組件通信鏈路的信號質量,自動選擇最佳路由進行雙向通信傳輸,當傳輸質量下降時,智能通信網關從監測的通信鏈路中選擇最好的鏈路和通道,自動將數據流切換到更好的通信信道.對于重要的信息,依據數據壓縮加密算法進行處理,確保信息的安全.
1.3.3 無人平臺智能通信網關的工作流程
網關控制主程序隨設備上電后開始運行,完成控制邏輯類的創建和初始化.配置完成后,隨即進入設備管理類的循環,開始對各個通信鏈路的信號狀態和信號強度進行檢查,對消息隊列進行查詢并處理、分發.結合硬件設計方案和邏輯控制類的劃分,主程序會不斷循環對消息隊列進行查詢,當消息隊列有消息時,對消息進行分發,包括對消息類型的判定,完成對消息的轉發、或對命令的執行.
1.3.4 智能通信網關基于融合通信智能算法的通信信道智能控制策略
智能通信網關負責無線通信自組織建立網絡,實現有序通信.采用基于RTS/CTS握手機制的沖突避免型(MACAW)協議[4],MACAW類協議以最小化數據碰撞為目標,通過RTS/CTS交互來避免隱藏終端和暴露終端,適合小規模的多跳式網絡.
圖5為協議行為示意圖.當節點有數據需要發送時,首先進入“退避”狀態,監聽信道中是否有其他節點正在通信,如果沒有監聽到其他節點的通信,則發送RTS幀,目地節點接收到RTS幀后,發送CTS幀,源節點收到CTS幀后,開始發送數據幀DATA,目的節點收到正確的DATA幀后,就返回確認幀ACK.共享同一個信道的其他節點接收到RTS/CTS后進入一定時長的“靜默”狀態,在靜默狀態下,為了不干擾其他節點的通信,節點不能發送信息.
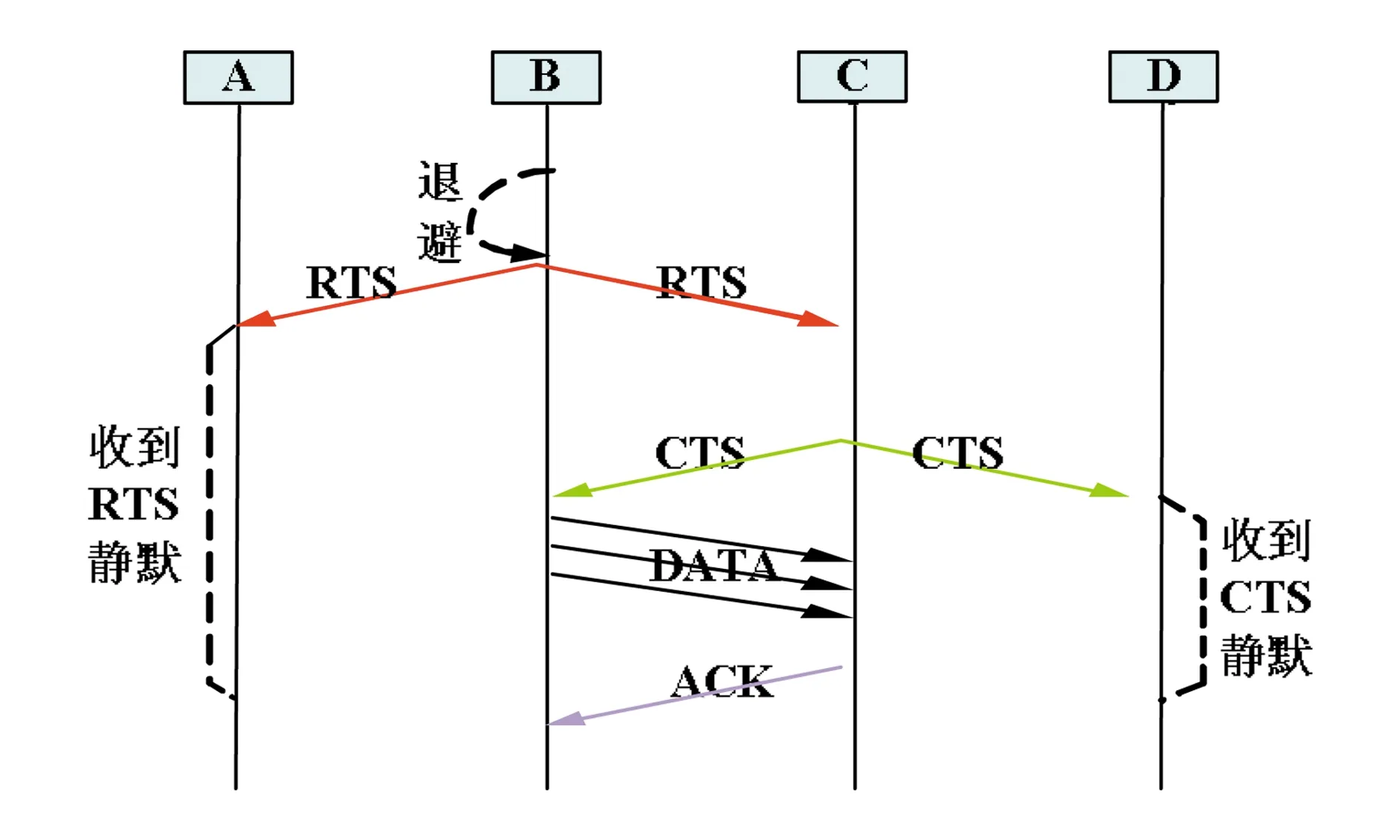
圖5 協議行為示意圖
智能通信網關負責支持無線通信網絡動態路由,保障網絡通信鏈路的抗毀性.在路由協議上采用固定式路由和泛洪-按需式路由相結合的方式,岸基指揮控制中心通過浮標無線通信鏈路——水聲通信下行鏈路,可以人工設置和修改無線通信鏈路之間的路由關系;當移動節點需要通過水下網絡將數據發送至岸基數據中心時,可以發送路由請求消息,自動尋找去往出水面浮標的路由.圖6是泛洪-按需式[5]路由處理流程圖.
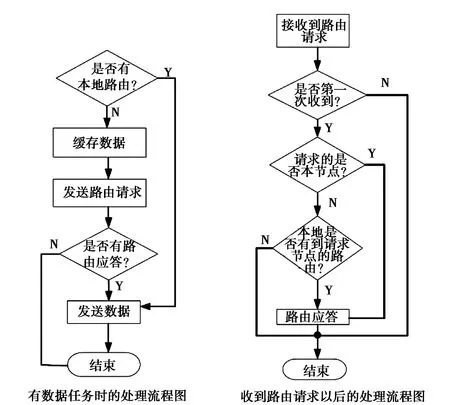
圖6 按需式路由處理流程圖
智能通信網關無線通信傳輸協議規范采用標準SLIP協議[6].在每個設備信息幀的首尾各加一個特殊的標志字節END,封裝成SLIP幀.
2 試驗驗證
2019年9月我們以湖上聯調實驗的方式對無人平臺多模融合通信系統予以驗證.通過岸基數據平臺遙控無人平臺,實現對無人平臺的各個通信鏈路的測試和控制.
2.1 測試方法
1)完成布放所有無人平臺節點;
2)通過指控軟件,獲取無人平臺的定位信息,能夠顯示無人平臺綜合態勢;
3)通過無人平臺監控軟件,修改無人平臺中無線通信設備的工作模式(例如路由路徑、休眠模式等),能夠以指定路由或自動路由的方式進行數據傳輸;
4)測試無人機和無人艇依次達到1#無人平臺、2#無人平臺完成測試.如圖7所示.
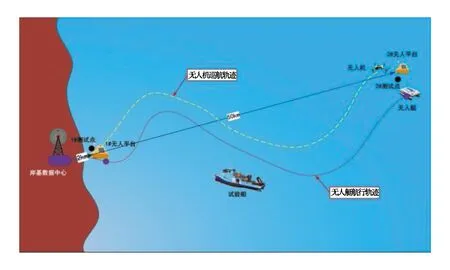
圖7 測試路徑示意圖
無人機和無人艇分別從岸邊出發,分別經過離岸2 km遠的1#無人平臺和離岸50 km遠的2#無人平臺.1#和2#無人平臺正常情況下分別通過LORA和MESH通信鏈路與岸基數據中心進行數據交互,當無人機和無人艇經過時,1#和2#無人平臺分別與無人機和無人艇的LORA、WiFi、超短波通信鏈路建立鏈接,然后將信息發送給無人機和無人艇,通過無人機和無人艇的超短波、MESH和天通通信鏈路將信息傳送到岸基信息中心.1#和2#無人平臺通過無人機和無人艇的通信鏈路,與岸基數據中心之間實現自動路由信息傳輸.
2.2 測試結果
測試無人機和無人艇路過1#、2#無人平臺時,二個無人平臺的水下采集信息,能夠以指定路由或自動路由的方式將數據傳輸到岸基中心指控軟件,滿足通信組網功能的指標要求.
1) 1#測試點結果
在1#無人平臺,發射的數據如圖8所示.
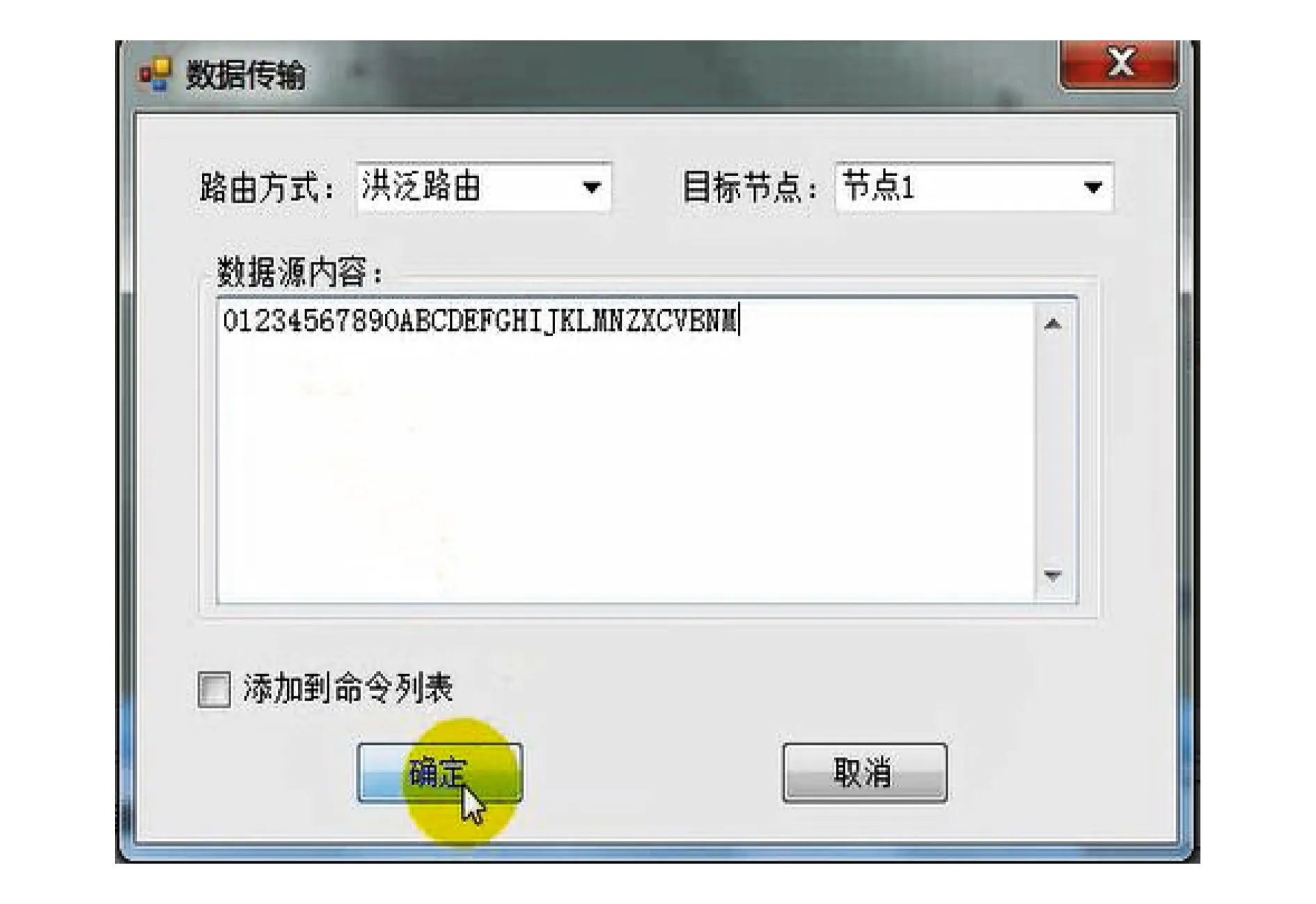
圖8 1#無人平臺發射的數據內容
岸基中心指控軟件以自動路由形式接收到的數據內容如圖9所示,可見與1#無人平臺發射的數據完全相同.
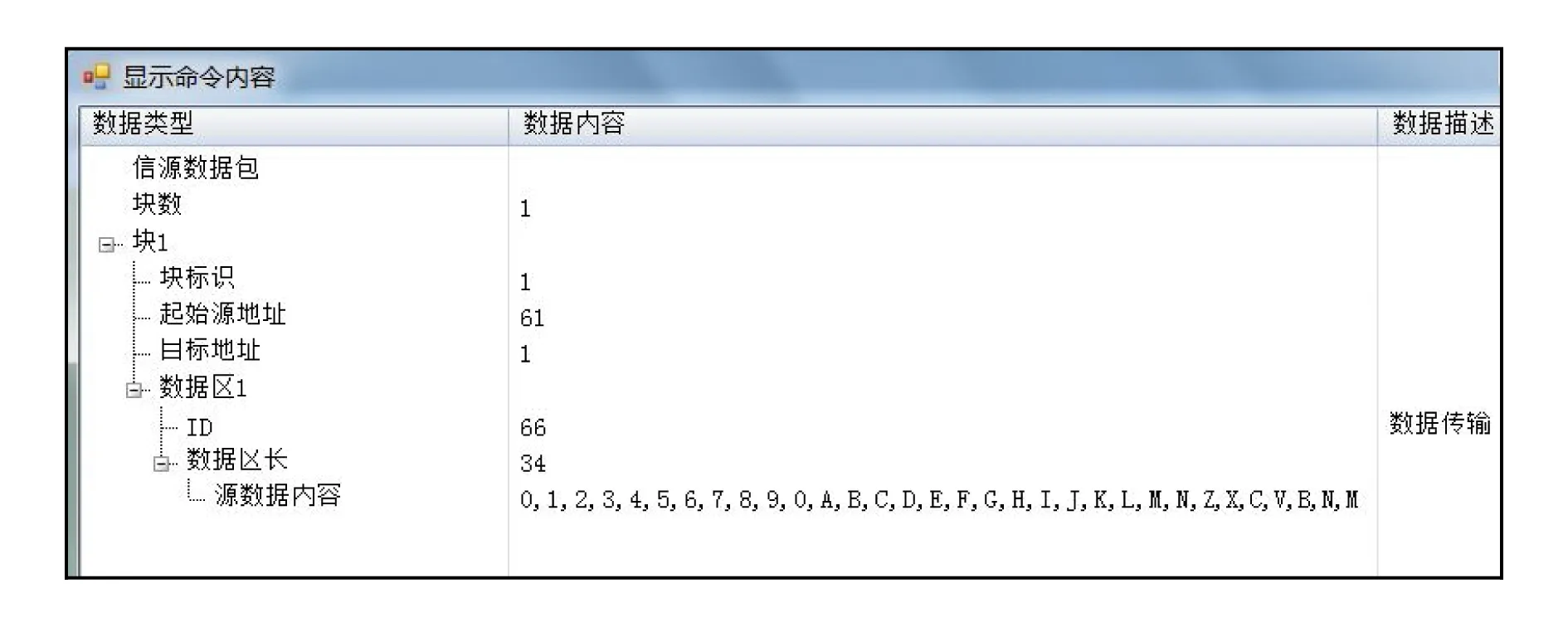
圖9 岸基中心指控軟件以自動路由形式接收的數據
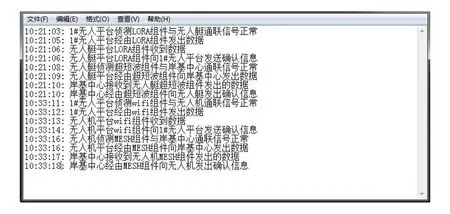
圖10 1#測試點路由重構和信息傳輸過程
在1#無人平臺,通過自動路由、路由重構功能,將信息準確傳送到了岸基中心,如圖10所示.
2) 2#無人平臺測試點結果
在2#無人平臺,數據源發射數據如圖11~13所示.
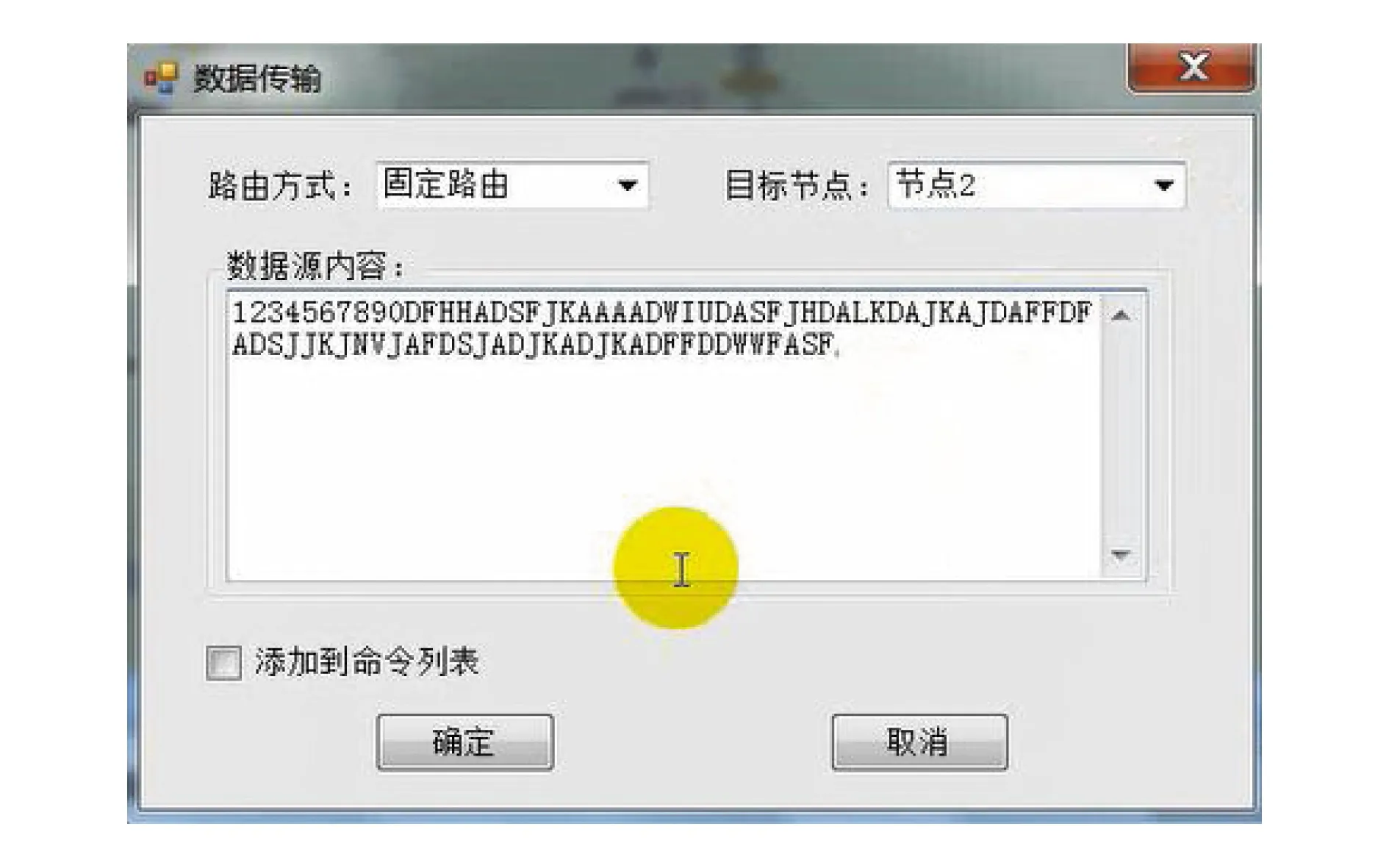
圖11 2#無人平臺發射的數據內容
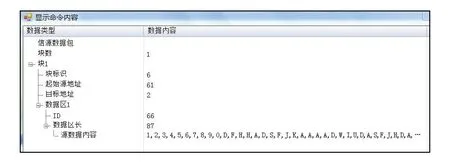
圖12 岸基中心指控軟件接收到的數據內容

圖13 2#無人平臺自動路由信息傳輸過程
在2#無人平臺,通過自動路由、路由重構和MACAW協議功能,將信息準確傳送到了岸基中心.
2.3 測試小結
試驗結果表明,海洋無人平臺多模融合通信系統能在不同測試區、不同通信條件下將水下無人航行器(UUV)的各種水文信息、預警信息、水聲原始信息等經過多模融合無線通信鏈路自動路由選擇發送到岸基數據中心,同時,數據中心可實時對無人平臺的各個通信鏈路進行實時檢測和控制.
3 結 語
本文針對海洋應急指揮機動通信組網在復雜海洋環境下的通信鏈路問題,提出了基于智能通信網關控制的海洋無人平臺多模融合無線通信技術.經過實際測試,證明基于該技術,復雜海洋環境下海洋應急指揮機動組網系統中的無人平臺能將采集的相關信息通過多模融合無線通信鏈路,自動選擇路由將信息傳輸到岸基數據中心,同時接收岸基數據中心的各項控制指令,實現雙向可靠信息交互.該技術的實現在海洋通信領域應用具有重大的意義,為近海、中海、遠海全空間機動通信組網各信息節點的互聯互通提供了有力的技術支撐.下一步,將進一步開發基于人工智能技術的智能通信網關軟件控制技術,使得海洋無人平臺能實現自我診斷、自我評估、自動修復、自動遠程報警等多項功能,從而增強其在惡劣海洋環境下的可靠工作能力,更好地服務于海洋應急指揮機動組網系統網絡.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
