基于MeanShift算法的車輛檢測與跟蹤研究
2020-09-14 12:17:24何俊龍
時代汽車 2020年15期
何俊龍
摘 要:文章通過建立車輛正、負樣本庫,完成對車輛識別分類器的訓練,并通過MeanShift跟蹤算法完成對前方已識別車輛的穩定跟蹤。試驗結果表明,該算法能夠準確、穩定地對前方車輛進行跟蹤,且實時性較高,可以為汽車主動安全系統提供可靠支持。
關鍵詞:汽車安全 MeanShift算法 車輛識別與跟蹤
1 引言
在汽車智能化發展過程中,移動車輛的識別與跟蹤一直以來都是最熱門的研究內容之一。金立生等人運用Adaboost算法對日間前方車輛的完成了準確且快速地檢測[1]。趙奇慧等人就深度學習運用于車輛跟蹤的神經網絡模型進行了詳細的闡述,并對目前車輛檢測中待解決的問題、未來待改進的方向進行了分析和討論[2]。本文所采用的MeanShift算法自Fukunage學者在1975年提出后,至今仍是業界內非常著名的跟蹤算法,該方法在低速場景下對移動目標的跟蹤具有非常良好的準確性及實時性。
2 前方車輛識別
車輛識別分類器的訓練過程主要通過調整參數對樣本進行特征提取并計算,包括采集樣本、創建Haar特征、設置及調整參數、計算虛警率(誤差率)等。檢測流程最重要的步驟是對圖像劃定ROI并對其進行搜索,從而得到識別結果。
2.1 正、負樣本
正樣本集為試驗臺中前方車輛尾部的圖像,共1000張,負樣本集為不含車輛的其他圖像,共3000張。
2.2 Haar-like特征與積分圖
Haar-like特征是圖像中的矩形特征,本文通過對車輛的尾部輪廓特征進行研究,從而實現對前方車輛的識別與跟蹤。
積分圖是一種加速特征計算的數學方法。積分圖中ii(x,y)的大小等于點(x,y)左上方區域所有像素值之和。
式中為點的像素值,為點的積分值。
2.3 分類器與級聯分類器
為降低分類器的誤警率,在進行訓練時,必須設置一個合理的特征閥值處理正、負樣本并使每個弱分類器對應一個Haar-like特征。
通過Adaboost算法將訓練所得的弱分類器組合成一個強分類器。并將其按照由易到難的方式進行逐級串聯,得到級聯分類器。在級聯分類器結構中,每個子窗口會通過所有的分類器,如果子窗口中不存在待檢測圖像會立即被排除,只有被所有強分類器檢測到有效目標后,才能輸出檢測結果。因此該分類器不僅提升了目標檢測的準確性,還提高了算法的檢測效率。
3 跟蹤算法
3.1 MeanShift跟蹤算法
本文采用MeanShift跟蹤算法對分類器所識別出的結果進行跟蹤,并確定跟蹤目標的運動軌跡。該算法先通過計算出當前特征點的偏移均值,并將特征點移動到此,然后以其為新的起點繼續移動,直到滿足最終條件為止。MeanShift跟蹤算法的核心是其目標模型、目標候選模型、相似性函數三者的確定。
3.1.1 目標模型
3.2 Mean Shift跟蹤算法過程
MeanShift跟蹤算法的具體流程為:
a、當同1個目標被連續檢測到n(本文取n=3)次時,即判定其為待跟蹤目標,調用算法對其進行跟蹤;
b、當被連續檢測到的目標在某幀丟失時,算法判定該目標臨時失效,利用跟蹤結果將其位置在圖中標記出來;
c、當被連續跟蹤的目標消失m幀(本文取m=5)時,判定目標已經離開檢測范圍,不再對其進行跟蹤,直到新目標出現并滿足第一個條件;
d、當被跟蹤目標在m幀內被重新檢測出來時,使用該目標對算法進行更新,繼續對目標進行跟蹤。
4 試驗驗證
4.1 前方車輛識別
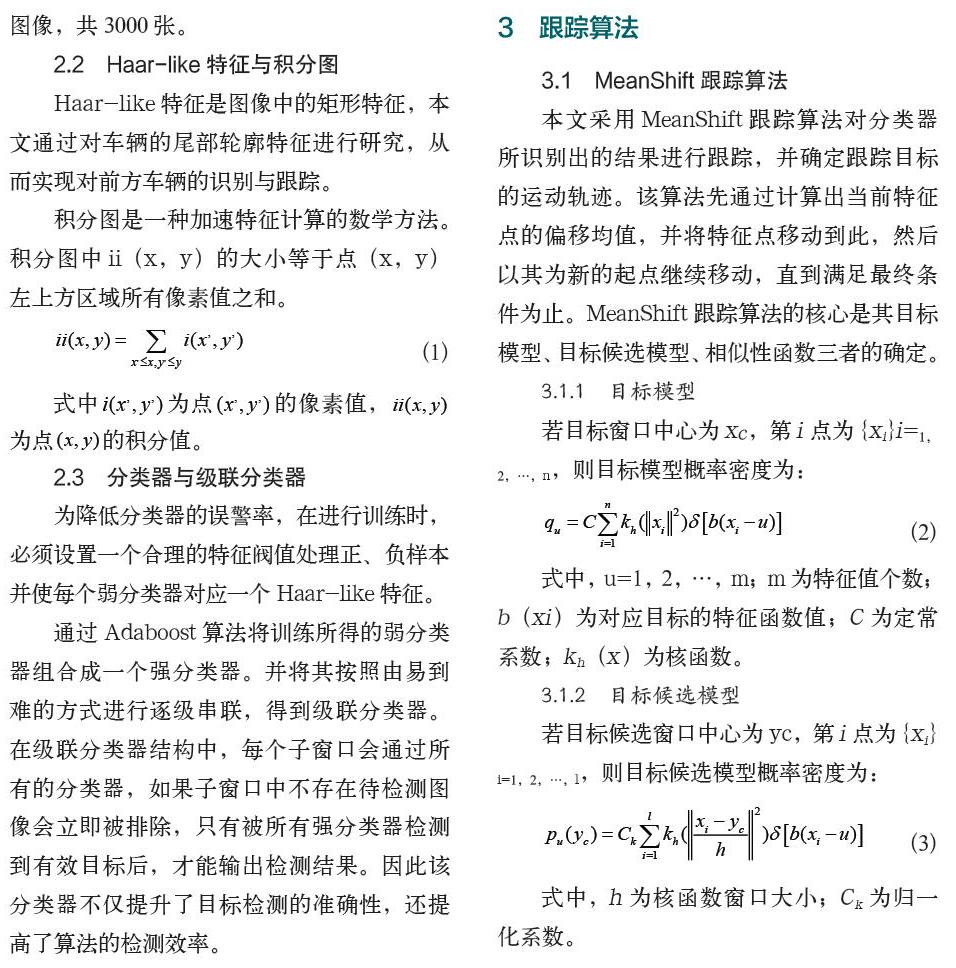
為驗證算法的有效性,分別對車輛在直線道路和彎曲道路行駛工況下進行識別,結果分別如圖1所示。
由圖1(a)可知,識別算法能夠準確識別出車道正前方的小車,對左側車道上較近的小車也有較好的識別效果。當出現外界環境干擾,即前車尾燈點亮時,該算法仍能夠對前方車輛進行準確識別并有效標記。
由圖1(b)可知,當前車行駛在彎道上時,雖然其航向角相對于本車發生了變化,也能被準確識別。這得益于Haar-like對前車尾部輪廓特征和邊緣特征的準確提取,并對其進行訓練后所得的性能優良分類器。
另外,對試驗過程中采集到的600幀圖像(兩種工況各300幀)進行識別,識別率高達97%,并且每幀圖片的平均處理時間為30ms,試驗表明該識別算法具有較好的實時性。
4.2 前方車輛跟蹤
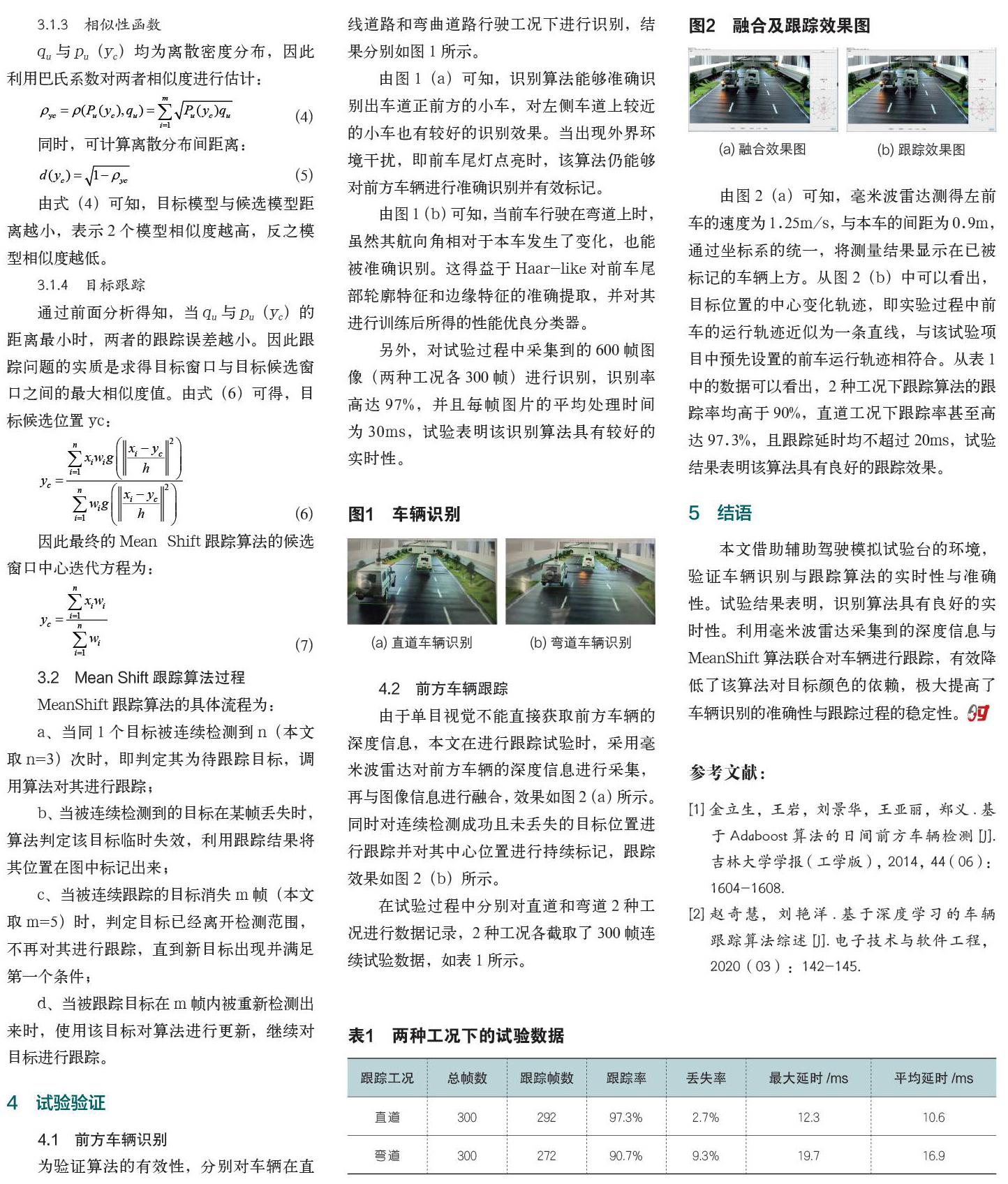
由于單目視覺不能直接獲取前方車輛的深度信息,本文在進行跟蹤試驗時,采用毫米波雷達對前方車輛的深度信息進行采集,再與圖像信息進行融合,效果如圖2(a)所示。同時對連續檢測成功且未丟失的目標位置進行跟蹤并對其中心位置進行持續標記,跟蹤效果如圖2(b)所示。
在試驗過程中分別對直道和彎道2種工況進行數據記錄,2種工況各截取了300幀連續試驗數據,如表1所示。
由圖2(a)可知,毫米波雷達測得左前車的速度為1.25m/s,與本車的間距為0.9m,通過坐標系的統一,將測量結果顯示在已被標記的車輛上方。從圖2(b)中可以看出,目標位置的中心變化軌跡,即實驗過程中前車的運行軌跡近似為一條直線,與該試驗項目中預先設置的前車運行軌跡相符合。從表1中的數據可以看出,2種工況下跟蹤算法的跟蹤率均高于90%,直道工況下跟蹤率甚至高達97.3%,且跟蹤延時均不超過20ms,試驗結果表明該算法具有良好的跟蹤效果。
5 結語
本文借助輔助駕駛模擬試驗臺的環境,驗證車輛識別與跟蹤算法的實時性與準確性。試驗結果表明,識別算法具有良好的實時性。利用毫米波雷達采集到的深度信息與MeanShift算法聯合對車輛進行跟蹤,有效降低了該算法對目標顏色的依賴,極大提高了車輛識別的準確性與跟蹤過程的穩定性。
參考文獻:
[1]金立生,王巖,劉景華,王亞麗,鄭義.基于Adaboost算法的日間前方車輛檢測[J].吉林大學學報(工學版),2014,44(06):1604-1608.
[2]趙奇慧,劉艷洋.基于深度學習的車輛跟蹤算法綜述[J].電子技術與軟件工程,2020(03):142-145.
