汽車總線技術的發展
2020-09-14 12:17:24汪偉
時代汽車 2020年15期
汪偉


摘 要:本文根據汽車總線技術的發展進程及其應用現狀,分別對CAN總線、LIN總線、MOST總線、FlexRay總線的特點、報文形式、應用領域進行了系統性及歸納性的總結,通過圖示將報文的組成、格式、作用進行了詳盡的說明,并結合了整車實際應用中的典型網絡拓撲對各總線的特征、優勢、缺陷進行對比。
關鍵詞:總線特點 總線報文 總線應用
1 引言
隨著科學技術的飛速發展,人類的需求不斷提高,汽車相關電子技術正逐步向電動化、智能化、網聯化、共享化方向發展。為了使車內傳感器與控制器,控制器與控制器之間實時進行信息交互,傳統的硬線連接已經無法滿足需求。汽車總線技術不僅可以滿足汽車設備連接要求,而且具有很強的擴展能力,具有廣闊的發展應用前景。
2 傳統硬線連接信息交互
在汽車技術發展初期,控制器及傳感器較少,傳感器給出的信息大多以簡單的高低電平或者是脈沖信號為主,采用點對點的單一通信方式,相互之間少有聯系。但是隨著汽車電子技術的逐步發展,傳感器技術的發展及車身控制器的增多,仍采用硬線連接進行信息交互,這樣必然會形成龐大的布線系統,不僅傳輸速率慢,而且線束成本高,不適應汽車輕量化及低成本要求。
3 CAN(Controller Area Network)總線
CAN總線(控制器局域網)是德國博世公司在80年代初期開發的一種串行數據通信協議,是多主總線,其通信介質主要有雙絞線、同軸電纜、光導纖維。
3.1 CAN總線特點
遵循國際標準ISO11898協議;通信速率最高可達1Mbit/s;數據通信沒有主從之分;當多個節點同時發起通信時,優先級低的節點避讓優先級高的節點;協議本身對節點的數量沒有限制;總線上節點的數量可以動態改變,組網相對靈活;
3.2 CAN總線報文
CAN總線報文的數據交換模式:節點A向節點B發送遠程幀請求,節點B收到后向節點A反饋同一標識符的數據幀。
3.2.1 數據幀
CAN總線中的數據幀分標準幀和擴展幀。其中標準幀的幀ID長度是11位,幀ID的范圍是0x 000-7FF。為支持總線節點擴展,可進行ID的擴展。擴展幀的幀ID長度是29位,其幀ID的范圍是0X 0000 0000-1FFF FFFF[1]。
3.2.2 遠程幀
遠程幀的報文格式是依據對應的數據幀格式而來,故可分對應標準數據的遠程幀和對應擴展數據的遠程幀,在擴展幀報文格式的基礎上去除數據場便得到對應擴展數據的遠程幀報文。
3.3 CAN總線應用
在汽車實際應用中CAN總線一般分為高速CAN和低速CAN。高速 CAN傳輸速率為500kbps,其主要用于ABS、變速控制、發動機控制、轉向控制、懸架控制等模塊的信號傳輸;低速CAN傳輸速率為125kbps,主要用于故障診斷、駕駛信息、電子儀表、自動控制、安全氣囊等模塊的信號傳輸。
4 LIN(Local Interconnect Networks)總線
LIN總線(局域互聯網絡),于1998年10月在德國被首次提出。LIN總線是一種低成本的串行通訊網絡,可用于實現汽車的分布式電子系統控制。LIN總線為現有汽車網絡(如CAN 總線)提供輔助功能,使用LIN 總線會大大節省成本[2]。
4.1 LIN總線特點
遵循國際標準ISO9141協議;使用12 V的信號線;通信速率最高可達20 Kbit/s;單個主控器和多個從設備模式,無需仲裁機制;在其總線網絡上,最多12個節點;在不需要改變LIN總線從節點的硬件和軟件基礎上,可以在網絡上增加網絡節點。
4.2 LIN總線報文
報文幀由幀頭和應答組成,當主節點發送幀頭,從節點在收到幀后,對幀頭進行分析然后決定是發送應答,接受數據,還是不響應。幀頭包括:同步間隔段、同步段、受保護ID段。應答包括:數據段、校驗和段。“0”為顯性,表示有數據發送;“1”為隱性,表示各節點沒有數據發送。同步間隔至少需持續13位,標志一個幀發送的開始。
4.3 LIN總線應用
LIN總線在整車中主要應用領域為:⑴車頂:天窗控制,信號燈控制,光敏傳感器,濕度傳感器;(2)駕駛艙:座椅調節、方向控制開關、電動門窗、空調、燈光照明;(3)發動機機艙:轉速傳感器、主動進氣格柵、發電機。
5 MOST(Media Oriented Systems Transport)多媒體定向系統傳輸
MOST總線(多媒體定向系統傳輸),寶馬、戴姆勒克萊斯勒等公司在1996年展開合作,在D2B(家用數字)總線的基礎上對MOST總線技術進行研究。通過光纜,在一個環形結構進行信息娛樂控制單元間數據交換,但傳輸只能朝一個方向進行[3]。
5.1 MOST總線特點
MOST總線不具備正式的標準;通信速率最高可達150 Mbit/s;用于圖像、聲音的實時處理;可采用星形和環形拓撲,而汽車應用中基本采用環形拓撲;一個主節點及多個從節點,主節點負責與外部信息交互及網絡控制管理,從節點可提供一種或多種網絡功能;在其總線網絡上,最多可以有64個節點。
5.2 MOST總線報文
在MOST總線網絡傳輸當中,每個傳輸塊含有16個數據幀,每個數據幀含2字節的控制數據域。故每個塊中共有32字節控制報文,報文可傳輸控制命令、狀態和診斷消息。總線報文由仲裁位、目的地址位、源地址位、報文類型、數據域、CRC校驗位、應答位和保留位組成。數據域又包含了功能塊標識符、功能塊實例、函數標識符、操作類型、報文標識符、報文長度及數據[4]。其中,數據域應用協議的數據格式,17字節中只有12字節用于參數傳遞;如果是多段消息,第1個字節還被用作報文計數,則只有11字節進行參數傳遞。
5.3 MOST總線的應用
MOST總線由于傳輸數據量大,損耗小,速度快、抗干擾性強,故多應用于汽車多媒體娛樂系統、汽車GPS導航系統,車載電話等。
6 FlexRay總線
FlexRay總線是為應對汽車線控技術對數據傳輸高速、可靠性高和確定性高的要求,由戴姆勒奔馳、寶馬等公司1999年推出,具備故障容錯能力。其還具備冗余通信能力,支持各種拓撲結構,常被用于需要持續及高速性能的場景[5]。
6.1 FlexRay總線特點
FlexRay總線是汽車工業的事實標準;支持兩個信道,每信道的速度可達到10 Mbit/s,總傳輸速率為20Mbit/s;網絡拓撲結構可以采用星型結構、線型結構、混合結構;中心節點負責轉發信息,當除中心節點外的某個節點線路故障或損壞時,中心節點可以斷開與該節點的通信。而中心節點損壞時,則整個總線便無法正常工作。
6.2 FlexRay總線報文
在FlexRay總線中,一個完整的消息幀包括幀頭、數據段和幀尾三部分組成。其中幀頭由保留位、數據指示位、空幀指示位、同步幀指示位、起始幀指示位、幀標識符、數據長度、幀頭CRC校驗和周期計數九部分組成[6],詳見圖1。
6.3 FlexRay總線的應用
FlexRay總線重要應用之一,就是線控制動、線控轉向等。它們是利用有容錯功能的電子、電氣系統取代原液壓、機械部分。線控操作包括從轉向到加速和剎車等所有汽車控制應用中的關聯技術。
7 結語
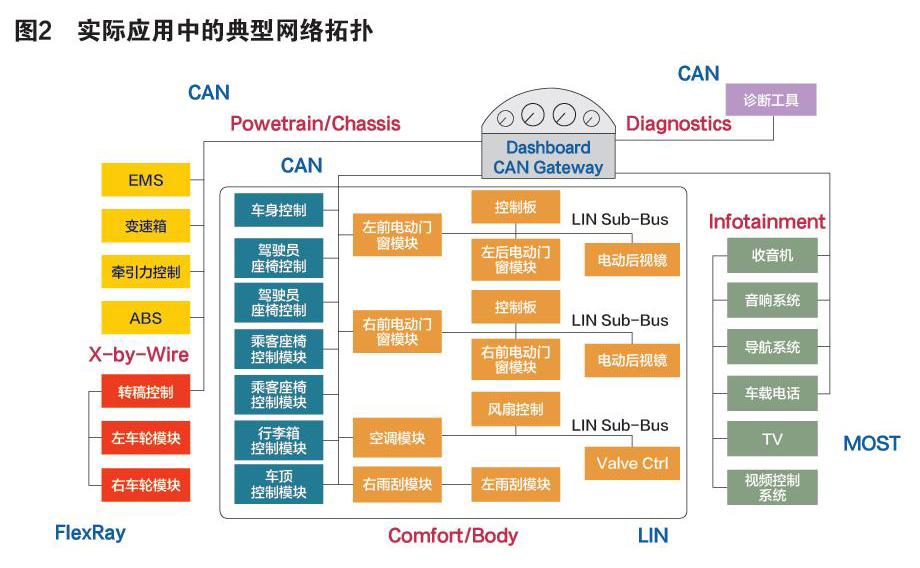
綜上所述,汽車總線網絡主要有CAN、LIN、MOST、FlexRay 4類總線,其在整車中的實際應用及典型網絡拓撲見圖2。
根據汽車總線的類型及其特點,可將汽車總線大致分為A、B、C、D四類,其相關對比及總結[7],見表1。
現代汽車網絡應用實例當中,多以CAN總線為主,LIN總線則作為CAN總線的一種輔助總線網絡,MOST也被逐漸應用在了車載信息娛樂系統中,并在局部線控操作系統中開始進行FlexRay的研究和應用。
隨著人們對車輛需求越來越多,要求的汽車功能也越來越高,使得汽車產業及汽車電子電氣產品不斷改造升級。為適應這一發展趨勢,亟需高速、實時、可靠、高帶寬的汽車總線,進而滿足汽車電動化、智能化、網聯化、共享化方向發展需求。本文概述了總線系統的發展進程、各總線的特點、報文格式及相關應用領域等內容,為深入了解汽車總線技術奠定了基礎。
參考文獻:
[1]王文蓉,陳瑞. 基于CAN總線的汽車智能網關/節點的設計[J]. 自動化與儀器儀表, 2012,(3):71-73.
[2]韓震,初洪超. LIN總線技術解析與應用[J]. 汽車實用技術, 2018,(21):142-144.
[3]韋志魁,韓小偉. 汽車總線技術分析[J]. 內燃機與配件, 2018,(9):89-90.
[4]秦貴和,黃永平,許冰,董勁南. MOST汽車多媒體網絡[M]. 北京:北京理工大學出版社,2010,19-25.
[5]閻樹田,黃新春,康會峰. 基于 FlexRay總線的嵌入式汽車線控制動技術研究[J]. 計算機測量與控制,2009,(3):487-489.
[6]許張義,張桂香,周聰. 線控轉向中FlexRay總線的應用[J]. 電子測量與儀器學報, 2013,(3):258-263.
[7]孫樂春.汽車總線系統初探[J].山東工業技術,2014,(18):12.
