基于嵌入式的自動泊車系統研究
2020-09-12 14:04:20熊能孫梅
科技風 2020年23期
熊能 孫梅
摘 要: 本文針對某品牌車型的自動泊車問題,進行了自動泊車系統的研究。通過對自動泊車過程的各個環節進行分析,設計了一種自動泊車系統。該控制系統能實現停車輔助、自動泊車3個功能,對新手駕駛員、交通擁堵停車困難的路況都有很大幫助,并能提升駕駛員的駕乘感受。
關鍵詞: 自動泊車;嵌入式系統;多路徑規劃
隨著小汽車在我國的逐漸普及,車位越來越緊缺,泊車愈發困難,新手駕駛員泊車難已經成為普遍問題。自動泊車指車輛可自動搜索停車位并完成泊入和泊出,在車輛搜索到車位后,駕駛員只需要按自動泊車提示信息進行檔位切換,在泊車時駕駛員要注意控制車速,駕駛員不必操作方向盤[1]。該系統對新手駕駛員、交通擁堵停車困難的路況都有很大幫助,并能提升駕駛員的駕乘感受。郭劍鷹等人設計了基于多視覺傳感器的泊車輔助系統[2],胡文等人進行了基于駕駛員經驗的自動泊車規劃算法研究[3],張持等人進行了基于兩段圓弧的倒推式平行泊車路徑規劃方法研究[4],李艷紅等人進行了基于嵌入式的智能尋跡泊車系統研究[5]。本文基于嵌入式系統,設計了一種自動泊車系統,解決幫助新手駕駛員在擁堵環境下停車的問題,達到提升駕乘感受的目的。
1 系統總體設計
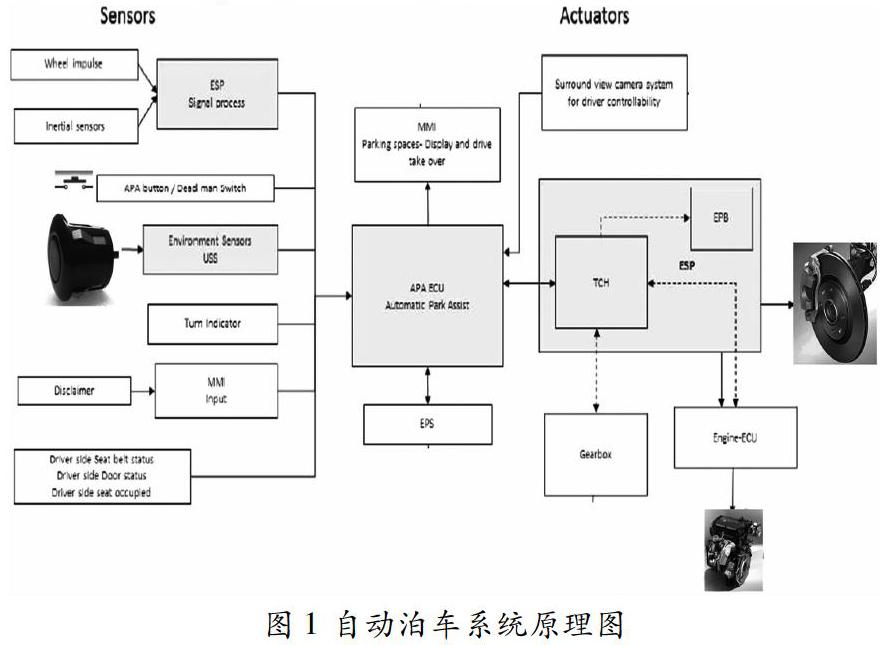
本文所設計自動泊車系統由三部分組成[6],分別是測量模塊、控制器模塊和執行顯示模塊。測量模塊通過車身四周的4個長距離超聲波雷達和8顆短距離超聲波雷達測量車輛周圍的環境參數;控制器模塊即ECU單元,根據測量模塊獲得的相關參數進行泊車軌跡規劃,同時控制車輛的方向盤使車輛按照規劃軌跡行駛,并且當車輛偏離規劃路徑時,控制器能對車輛行駛路徑進行校正;執行顯示模塊可以顯示車輛的控制狀態信息,當緊急情況出現時駕駛員能隨時介入,從而使泊車安全得到保障。自動泊車系統原理圖如圖1所示。
車輛自動泊車之前需要規劃車輛從起點到目標點的路徑[7],此路徑需滿足:(1)車輛按該路徑行駛不會與任何障礙發生觸碰;(2)該路徑是一條從起點到終點、符合車輛運動特性的軌跡線。通常的泊車路徑規劃方法是以兩圓弧相切式為代表的曲率不連續的路徑生成方法。此方法簡單可行,可應用于多種工況。本文所設計自動泊車系統采用多路徑規劃算法。車輛駛出泊車位時車輛后軸中心點的軌跡即為泊車路徑規劃所需的軌跡參數。
2 系統信號交互設計
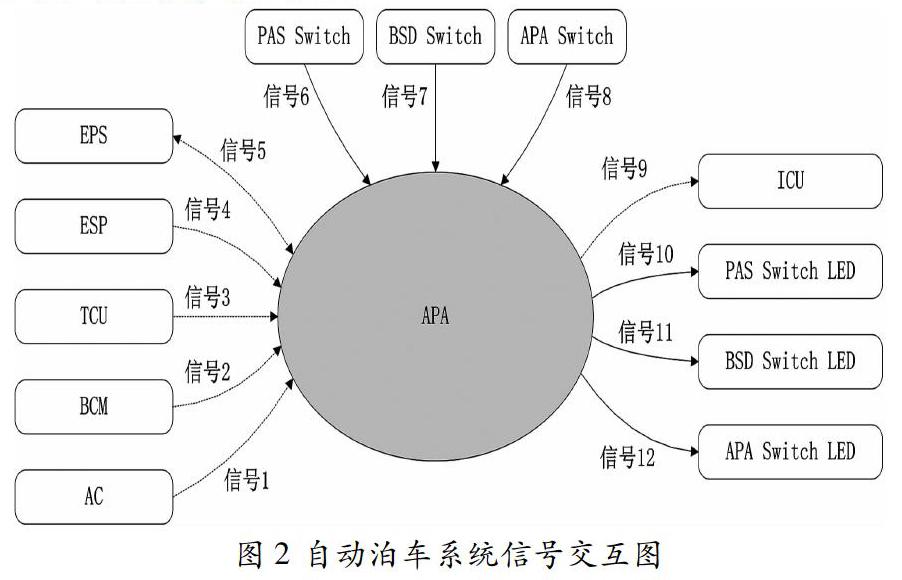
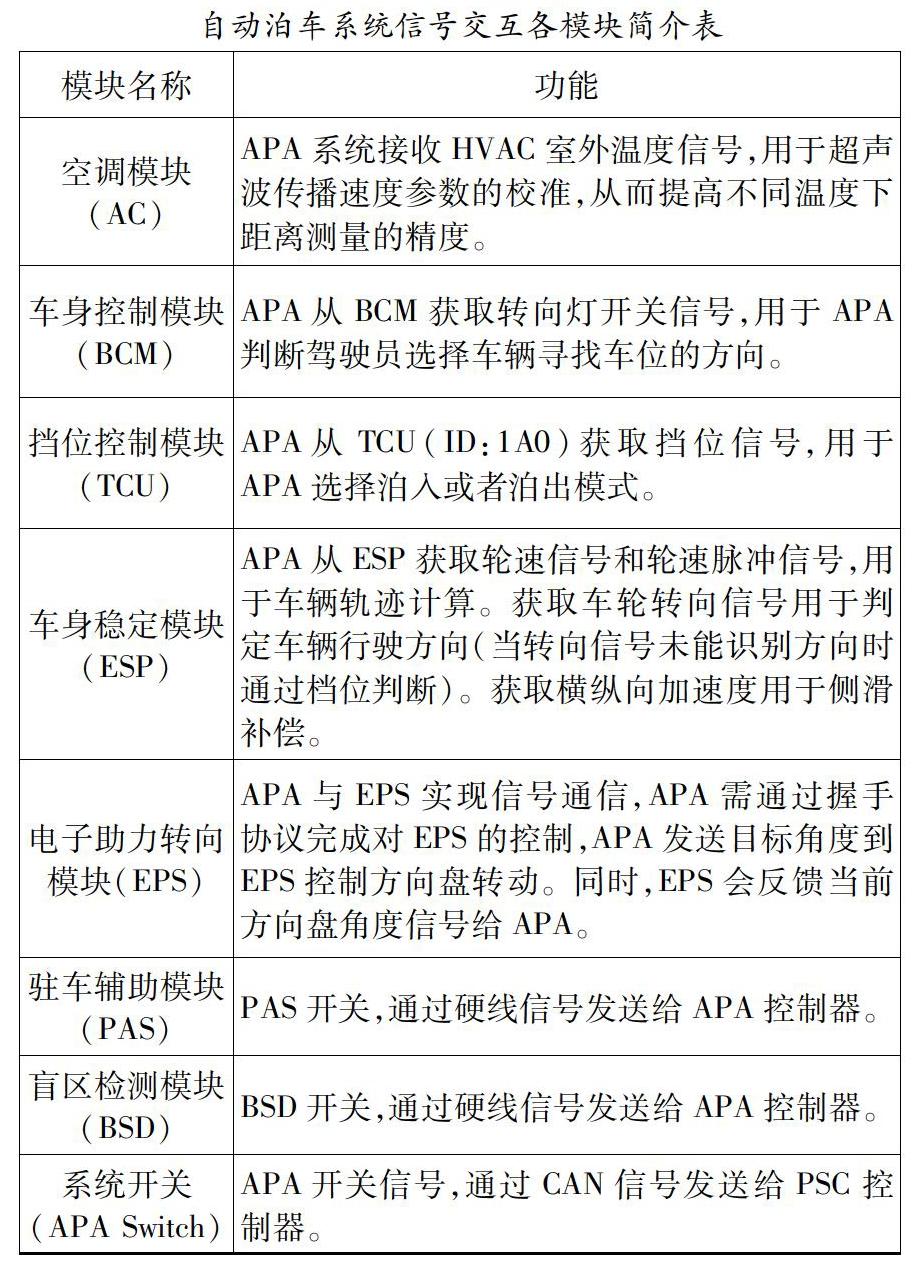
本文所設計自動泊車系統中,與自動泊車系統(APA)發生信號交互的模塊包括:空調模塊(AC)、車身控制模塊(BCM)、檔位控制模塊(TCU)、車身穩定模塊(ESP)、電子助力轉向模塊(EPS)、駐車輔助模塊(PAS)開關及指示燈、盲區檢測模塊(BSD)開關及指示燈、APA開關及指示燈、儀表控制模塊(ICU)。如圖2所示,其中箭頭方向表示信號走向,該信號交互圖的詳細介紹列如下表。
3 系統功能介紹
系統工作狀態包括:泊出功能和泊入功能。
3.1 泊出功能
當在R擋按下系統開關并選擇方向時,系統進入泊出環境檢測狀態,檢測車輛周邊環境需同時滿足以下條件,系統進入進入泊車引導狀態。
系統檢測車輛側邊障礙物間隙均大于3000mm、停車位大于車輛長度+750mm且距離前車小于1800mm。當系統檢測到車位不滿足條件時,需要發送對應狀態信號,用于HMI顯示:
(1)當車輛側邊障礙物間隙小于3000mm或者停車位小于車輛長度+750mm時:系統提示駕駛員停車位過小,退出自動泊車;
(2)距離前車大于1800mm時,系統提示駕駛員路徑順暢,請自行泊出。
3.2 泊入功能
在搜索到車位或檢測泊出環境滿足要求之后,系統會與EPS完成握手,并提示駕駛員操作擋位及剎車,直到泊車成功的過程。現以平行泊車為例。平行泊車指引從找到車位開始,到停車完成結束,將泊車指引狀態劃分為多個過程,如圖3所示。
(1)泊車指引①:車輛搜索到平行車位后,繼續向前行駛到車位關鍵點時,系統會提示駕駛員停車,發送停車信號給HMI顯示,系統檢測到車輛靜止后,發送切換擋位至R擋信號給HMI顯示。若駕駛員未停車繼續前行,則在行駛16m后放棄該車位。
(2)泊車指引①→泊車指引②:當整車速度小于0.5的時長大于1000ms、倒檔時間大于500ms且EPS處于可控制狀態中時,PSC系統發送請求與EPS握手信號,同時系統發送“轉向干預開始,請注意周圍環境”提示信息給HMI顯示。
(3)泊車指引②→泊車指引③:從泊車指引②過程切換到泊車指引③過程的觸發條件主要有以下三個:
a.泊車姿態橫向姿態合格,即達到目標車身角度,如車身與路沿平行。
b.車輛到達系統內部判定的換擋關鍵位置,如后輪要壓到馬路沿時。
c.后保任一雷達探頭檢測到障礙物距離小于30cm時。
在滿足泊車指引②過程結束條件后,系統發送“請停車”提示信息給HMI顯示。
系統檢測到車速為0、擋位切換到D擋后,系統發送“請向前行駛”提示信息,開始執行泊車指引③過程。
(4)泊車指引③→泊車指引④:從泊車指引③過程切換到泊車指引④過程的觸發條件主要有以下三個:
a.泊車姿態橫向姿態合格,即達到目標車身角度,如車身與路沿平行。
b.車輛到達系統內部判定的換擋關鍵位置。
c.前保任一雷達探頭檢測到障礙物距離小于30cm時。
在滿足泊車指引③過程結束條件后,系統發送“請停車”提示信息給HMI顯示。系統檢測到車速為0、擋位切換到R擋后,系統發送“請向后行駛”提示信息,開始執行泊車指引④過程。之后重復此泊車過程,直到泊車完成為止。
4 結語
本文基于嵌入式系統,采用多路徑規劃算法,設計了一種自動泊車系統。該系統能自動搜索停車位,并輔助駕駛員完成泊入和泊出功能,對新手駕駛員、交通擁堵停車困難的路況都有很大幫助。未來將進行反復實驗,對系統進行修改,使其更加完善。
參考文獻:
[1]郭卜源.自動泊車決策控制系統研究[D].西安:西安科技大學,2019.
[2]郭劍鷹,周小兵,管西強.基于多視覺傳感器的泊車輔助系統設計[J].傳動技術,2019,33(3):34-40.
[3]胡文,譚運生,等.基于駕駛員經驗的自動泊車規劃算法研究[J].汽車工程,2019,41(12):1394-1400,1415.
[4]張持,張永林.基于兩段圓弧的倒推式平行泊車路徑規劃方法[J].計算機與數字工程,2019,47(12):3035-3040.
[5]李艷紅.基于嵌入式的智能尋跡泊車系統研究[J].電子元器件與信息技術,2019,3(9):87-89.
[6]漆維正.智能泊車系統的路徑規劃算法研究及實現[D].西安:西安電子科技大學,2019.
[7]李攀.自動泊車系統路徑規劃與跟蹤算法研究[D].重慶:重慶理工大學,2018.
