基于PLC的移車臺控制系統
2020-09-10 11:16:11李武唐斌蔡永波孫高強張湟
內燃機與配件 2020年11期
李武 唐斌 蔡永波 孫高強 張湟

摘要:本文介紹了一種基于三菱Q系列PLC的鐵路車輛轉運平臺控制系統,利用CC-LINK總線進行系統內通訊,使用超聲波傳感器及安全光柵進行安全預警,形成了一套較為完善的移車臺控制系統。
關鍵詞:移車臺;PLC;防碰撞
0? 引言
在國家十三五、十四五規劃中,鐵路車輛制造、維護、修理的工作需求量愈加龐大,移車臺作為實現以上工作的關鍵保障設備日益受到各主機廠、維修站段的重視。本文涉及的移車臺屬于大型有軌下沉式重型轉運平臺,主要用于鐵路標準軌距1435mm,和諧、復興等機車及傳統內電機車在作業過程中的運送工作,可以將機車從平行的股道之間快速轉運的一種專用轉軌作業設備。根據移車臺實際使用工況,改變目前常規移車臺控制系統使用的人工控制運動對中方式,采用相應傳感器進行碰撞預警,以期實現移車平臺控制系統自動化程度的提高是目前移車臺發展的方向之一。
1? 移車臺控制系統總體方案
目前多數移車臺仍然使用手動方式進行控制,移動對中難度大、對軌精度低、作業時間長、人員要求高,很大程度上制約了車輛轉運效率,并且這種控制模式沒有主動式防碰撞功能。故此,自動化控制對中、一體化操縱、防碰撞預警是本文方案的重點。
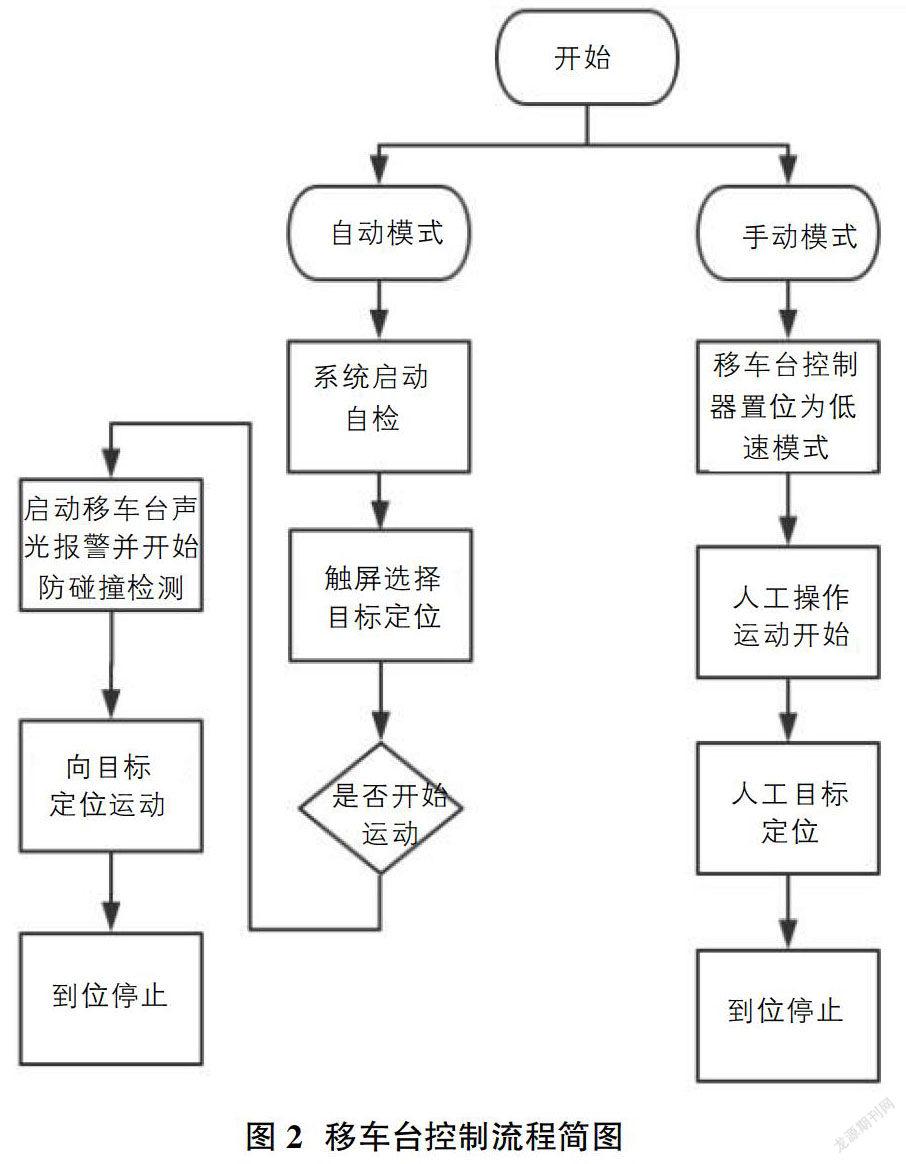
移車臺控制系統在臺位對角設置等同功能控制室,控制方式為自動模式和手動模式。自動模式下使用觸屏進行操作,控制系統將根據輸入指令、參數進行自動操作控制;當系統出現異常時,使用手動模式作為系統冗余進行人工操作對中。移動移車臺對中精度要求±2mm,在進行定位對中后釋放相應端渡板,貫通鐵路線路。
根據移車臺實際運用場景,電控方式滿足下列功能:
①驅動(向前、向后、無極調速);②制動;③停機;④緊急停機;⑤自動對軌;⑥西側翻板翻起、放下;⑦顯示和保護。
移車臺的柜體有主控臺、電源柜、控制柜、變頻柜和制動電阻柜。其中電源柜控制移車臺的整車電源,同時具有過載、短路和欠電壓保護功能,能保護線路和電源設備不受損壞。PLC、變頻器、制動電阻分布在控制柜、變頻柜和制動電阻柜內[1]。這樣將PLC和變頻系統在空間布置上區分開來,使得變頻器的高頻擾波不會影響到PLC的正常運行,同時又將制動電阻也區分開布置,使得制動電阻產生的高溫不會影響到PLC和變頻器的正常運行。
2? 硬件組成
移車臺控制系統由以下部分組成:主控單元部分、驅動系統部分、防碰撞預警部分、供電部分、照明部分及其他輔助控制部分組成。
2.1 主控單元部分
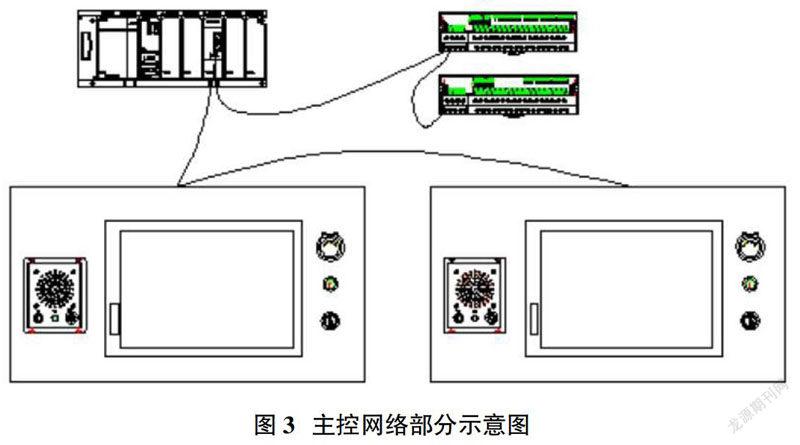
系統選用CC-LINK網絡構建系統組內通訊基礎,系統主控單元選用三菱模塊化Q系列PLC進行,觸屏控制器選用GOT2000系列,防撞預警部分使用CC-LINK遠程站實現,終端電阻設置在遠端(遠離主控CPU端)觸屏位置[2]。系統網絡構成后于遠程站附近預留網線接線端為日后升級無線控制終端做預留接口。
觸屏附近設置有線轉無線對講機,方便移車臺控制室與地面固定防護人員進行直接通訊。(圖3)
2.2 驅動部分
移車臺驅動系統主要由4個主動車輪裝置、4個從動車輪裝置及二套驅動裝置構成。為保證主動輪的同步運行,4個主動輪分別由二臺減速機驅動,每臺減速機通過萬向聯軸器同時驅動兩個主動輪,每臺減速機由一臺變頻器控制,通過PLC自動調整變頻器的頻率來保證各主動輪的同步運行。
驅動系統包括矢量控制變頻器、變頻電機和翻板升降電機等。變頻器作為主要驅動元件,驅動電機起、停、正轉、反轉和無極調速,實現移車臺平滑運動和翻板的升降等。驅動控制器采用矢量控制方式,通過對聯接在電機末端軸上的增量式編碼器進行檢測,實現速度閉環反饋,從而使移車臺兩臺電機的同步性得到了提高,并且從根本上降低了移車臺縱向兩端的偏差度。翻板系統采用兩個電動推桿分別控制移車臺縱向兩端的翻板。翻板轉軸位置設置兩個限位開關分別采集翻板的提升到位和對接到位的信號。翻板對軌有手動對軌、自動對軌兩種方式。翻板與車輛驅動互鎖,只有翻板上升到位移車臺才能移動。
2.3 防碰撞預警部分
移車臺控制系統所使用的防碰撞預警包括三個方面:雙向超聲探測部分,兩端安全光柵部分,移車平臺狀態指示燈部分。
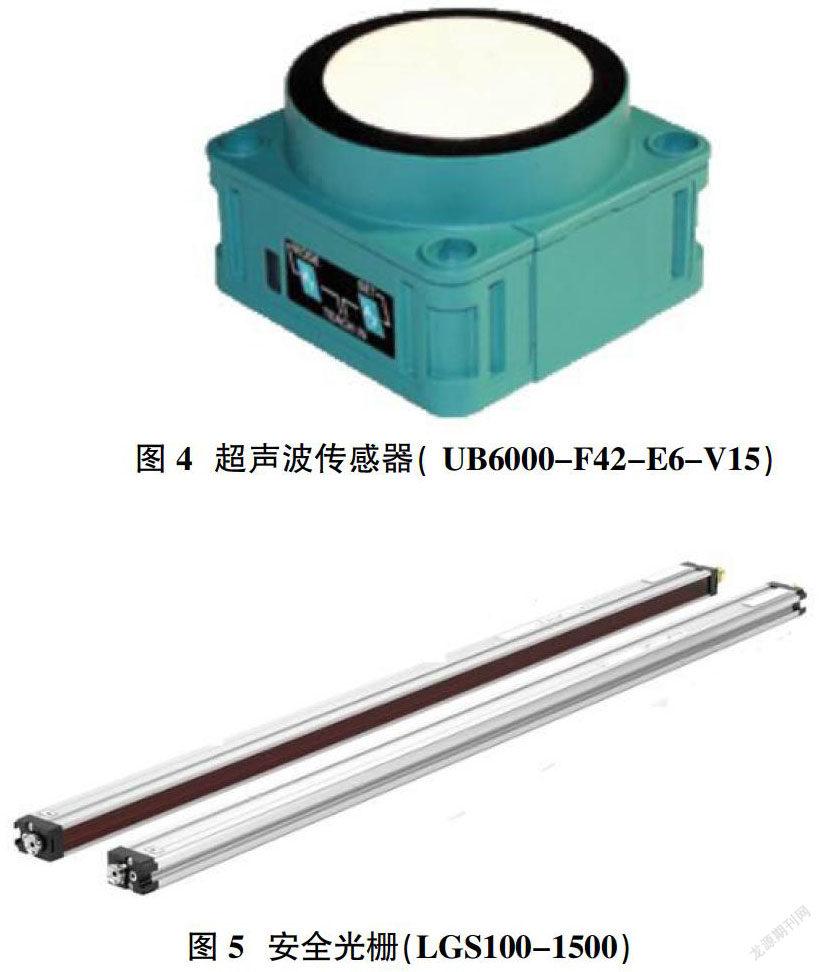
雙向超聲探測部分使用超聲波傳感器安裝于移車平臺前進后退方向側梁上,設置聲錐寬度為寬錐,探測距離6m。當移車臺向前或向后移動時,控制系統自動開啟相應方向超聲波傳感器進行運動路徑的防撞預警。當移車臺移動方向檢測到障礙存在時,自動控制移車臺進行減速停車。(圖4、圖5)
兩端安全光柵部分選用對射式紅外光柵傳感器,設置高度距移車臺地面1.5m,分辨率100mm,移車平臺在收起兩端渡板后,系統自動控制開啟安全光柵對移車臺內部進行監控,防止車輛出現異常滑移或外部人員闖入。
移車臺控制系統除了上述主動防碰撞預警裝置外還設置有狀態指示燈明晰移車臺狀態。在移車臺滑觸線兩端設置,設置三色狀態指示燈顯示工作狀態。在移車臺四角分別設置聲光報警裝置,當移車臺處于動作狀態時發出聲光報警。
2.4 供電、照明部分
移車臺供電系統采用安全滑觸式,滑線導軌距地面高6m,滑線導軌平行度、直線度按照相關國家、行業標準設置,滑觸線為三相四線制,兩終端設置有電指示燈。
照明部分分為固定安裝于臨近滑線導軌的高位射燈、安裝于移車臺前后的低位照明燈以及安裝在移車臺兩端軌道對位射燈。
2.5 其他輔助控制部分
移車臺兩端對角設置的控制室內設置視頻監控顯示器,在移車臺兩端及前后運動方向共計設置8個攝像頭實時顯示移車臺狀態,并在主控柜內設置NVR主機將視頻監控視頻進行存儲。
移車臺定位采用接近開關感應預埋軌道接口地面的鋼制沉樁進行,埋樁分為定位埋樁和識別埋樁。定位埋樁采用不同四種定長使得系統可以在不同定位距離識別并控制移車臺進行一至三級減速控制。識別埋樁采用二進制序列進行預埋,當移車臺運轉至相應序號軌道附近時可以進行識別[3]。
3? 結束語
本文論述了一種基于PLC的總線結構移車臺控制系統,操作人員經過簡單培訓即可上崗使用。采用超聲波及光柵傳感器提升了移車臺作業狀態的安全性,是一種低成本實現控制的系統,大大提高了生產運行的安全和效率,通過現場驗證這種控制系統在簡化操作的同時也保證了系統的可靠性。此種類型的控制應用有著廣泛的前景,可以在類似機械裝備廣泛應用,必將在工廠自動化、智能化的發展中發揮越來越大的作用。
參考文獻:
[1]唐中燕.三菱PLC與伺服驅動器之間的通信[J].機床電器, 2012(06):28-29,32.
[2]林桂娟,宋德朝,陳明,等.基于CC-Link現場總線的遠程智能監控系統[J].機床與液壓,2010,038(008):84-86,3.
[3]吳四二,蘇先輝.淺坑式移車臺的設計與計算[J].鐵道車輛,2014,52(2):35-37.