基于虛擬定標(biāo)線的巡檢機(jī)器人視覺(jué)導(dǎo)航設(shè)計(jì)研究
2020-09-10 09:26:10張初宏
內(nèi)燃機(jī)與配件 2020年12期
關(guān)鍵詞:設(shè)計(jì)

摘要:巡檢機(jī)器人視覺(jué)導(dǎo)航系統(tǒng)的應(yīng)用,可實(shí)現(xiàn)自由轉(zhuǎn)向并可顯著提升導(dǎo)航效率。本文設(shè)計(jì)出了一種基于虛擬定標(biāo)線技術(shù)的巡檢機(jī)器人視覺(jué)導(dǎo)航系統(tǒng),旨在通過(guò)改變巡檢形式來(lái)提升巡檢成效,并最終在時(shí)代發(fā)展需求中,持續(xù)服務(wù)導(dǎo)航提供工作。
關(guān)鍵詞:虛擬定標(biāo)線;巡檢機(jī)器人;視覺(jué)導(dǎo)航;設(shè)計(jì)
0 ?引言
巡檢機(jī)器人視覺(jué)導(dǎo)航系統(tǒng)以智能化設(shè)計(jì)為目標(biāo),與時(shí)代相稱(chēng)并在設(shè)計(jì)方法上滲透現(xiàn)代化技術(shù);在視覺(jué)導(dǎo)航上做出嚴(yán)肅處理,并在后續(xù)工作運(yùn)維中,達(dá)到預(yù)設(shè)目標(biāo)。機(jī)器視覺(jué)(Machine Vision)即以巡檢機(jī)器人視覺(jué)導(dǎo)航作為人工智能領(lǐng)域中發(fā)展迅速的一個(gè)重要分支,不斷突破、走向成熟。機(jī)器視覺(jué)“是通過(guò)光學(xué)裝置和非接觸傳感器自動(dòng)地接受和處理一個(gè)真實(shí)場(chǎng)景的圖像,通過(guò)分析圖像獲得所需信息或用于控制機(jī)器運(yùn)動(dòng)的裝置”,證實(shí)基于虛擬定標(biāo)線技術(shù)涉及的智能圖像處理技術(shù)在機(jī)器視覺(jué)中占有舉足輕重的位置。相關(guān)設(shè)計(jì)細(xì)則分析如下:
1 ?設(shè)計(jì)所涉技術(shù)概述
以設(shè)計(jì)環(huán)節(jié)虛擬定標(biāo)線技術(shù)的應(yīng)用為例,通過(guò)融合計(jì)算機(jī)虛擬技術(shù)來(lái)作為本次巡檢機(jī)器人的重要科學(xué)技術(shù)形式之一,為巡檢機(jī)器人視覺(jué)導(dǎo)航系統(tǒng)尋求CPU、內(nèi)存、磁盤(pán)空間等組合資源支持的操作環(huán)境,以便于在資源配置上更具優(yōu)勢(shì)。
控制巡檢機(jī)器人虛擬定標(biāo)線技術(shù)的運(yùn)用,是沿著導(dǎo)航線移動(dòng)的關(guān)鍵技術(shù),是機(jī)器人對(duì)導(dǎo)航線方位和距離精準(zhǔn)定位的過(guò)程;虛擬定標(biāo)線以現(xiàn)代圖像處理的優(yōu)勢(shì),在檢測(cè)到信號(hào)與導(dǎo)航線與相應(yīng)位置融合中實(shí)現(xiàn)極速化控制,利用模糊控制策略,對(duì)機(jī)器人沿著導(dǎo)航線的行走進(jìn)行控制,降低機(jī)器人運(yùn)作環(huán)節(jié)與實(shí)際偏離角度和距離等較大問(wèn)題。
2 ?結(jié)構(gòu)設(shè)計(jì)和功能
巡檢機(jī)器人視覺(jué)導(dǎo)航自動(dòng)化的發(fā)展,使得遠(yuǎn)程監(jiān)控機(jī)械電氣設(shè)備型號(hào)、監(jiān)控?cái)?shù)據(jù)信息采集及其絕緣監(jiān)測(cè)等成為了可能。在實(shí)際運(yùn)用中,對(duì)降低運(yùn)維工作數(shù)量,演唱巡視檢修工作中后期等具有重要的意義。基于虛擬定標(biāo)線的巡檢機(jī)器人視覺(jué)導(dǎo)航結(jié)構(gòu)設(shè)計(jì)旨在滿(mǎn)足預(yù)設(shè)工作效果,充分發(fā)揮設(shè)計(jì)作用優(yōu)選及其功能優(yōu)勢(shì),最終與巡檢工作實(shí)踐中,相應(yīng)的以戰(zhàn)略性、科學(xué)化、合理化方法,滿(mǎn)足當(dāng)前工作良性需求。
結(jié)構(gòu)設(shè)計(jì)中,通過(guò)合理創(chuàng)建子系統(tǒng)來(lái)實(shí)現(xiàn)自由運(yùn)動(dòng),直接與主板結(jié)構(gòu)(AT、Baby-AT、ATX、Micro ATX、LPX、NLX、Flex ATX、EATX、WATX以及BTX等)、PMAC2A-104運(yùn)動(dòng)控制卡一道,連同電機(jī)設(shè)備驅(qū)動(dòng)器等內(nèi)容,對(duì)方便機(jī)器人實(shí)際巡檢,嚴(yán)格控制運(yùn)動(dòng)和行為起效良好。以光伏電站巡檢清潔無(wú)人機(jī)為例,具體設(shè)計(jì)結(jié)構(gòu)如圖1所示。
基于上述結(jié)構(gòu)設(shè)計(jì)要訣中包括信息數(shù)據(jù)收集、諸多技術(shù)方式采用、臨床巡檢路徑開(kāi)辟等,均需在系統(tǒng)實(shí)時(shí)化場(chǎng)景尋求數(shù)據(jù)建模及其集合的融通路徑。設(shè)計(jì)對(duì)局進(jìn)行局部整合、規(guī)劃搜集、滲透力學(xué)控制、算法、承受速度等管理控制中,使得設(shè)計(jì)效果于設(shè)計(jì)質(zhì)量得到全面提升。
3 ?設(shè)計(jì)路徑
3.1 設(shè)計(jì)目標(biāo)
為進(jìn)一步提高巡檢工作效率及適用范圍,設(shè)計(jì)出個(gè)性自動(dòng)巡檢系統(tǒng),需從基本初級(jí)自動(dòng)巡檢著手,配合PCA、神經(jīng)網(wǎng)絡(luò)算法等進(jìn)行測(cè)試,力圖達(dá)到開(kāi)發(fā)應(yīng)用效果。主要設(shè)計(jì)目標(biāo):自主規(guī)劃實(shí)現(xiàn),即方向控制、障礙物識(shí)別與規(guī)避等;彌補(bǔ)以往巡檢中的人力消耗過(guò)大問(wèn)題,解決緊急情況巡檢員人工操作控制能力和技術(shù)水平不足的缺憾。
3.2 設(shè)計(jì)特征
機(jī)器人智能巡檢系統(tǒng)以網(wǎng)絡(luò)分布式三層構(gòu)架為框架,包括基站層、通訊層和終端層。發(fā)揮在任意巡檢檢查工作設(shè)定時(shí)間任意任務(wù)完成的功能;日常巡檢中的可見(jiàn)光攝像頭、紅外測(cè)溫、自主和遙控巡檢、圖像遙傳功能、自動(dòng)停障、機(jī)器運(yùn)轉(zhuǎn)本身狀態(tài)信息采集及分析功能、巡檢系統(tǒng)歷史事件查詢(xún)、各巡檢設(shè)備數(shù)據(jù)分析和報(bào)表制作、智能報(bào)警等諸多功能;基于紅外專(zhuān)家?guī)斓脑O(shè)備紅外圖片手動(dòng)分析功能;最優(yōu)路徑規(guī)劃功能;對(duì)講與喊話功能;具備微氣象信息采集系統(tǒng)。
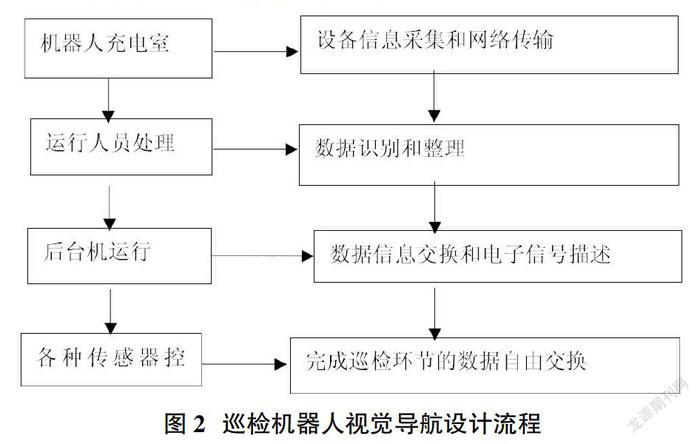
3.3 結(jié)構(gòu)設(shè)計(jì)流程
具體結(jié)構(gòu)設(shè)計(jì)流程如圖2所示。
3.4 調(diào)試檢測(cè)
主要內(nèi)容包括巡視一次設(shè)備巡檢系統(tǒng)通道確立,二次設(shè)備巡檢實(shí)現(xiàn)困難。紅外測(cè)溫系統(tǒng)因環(huán)境因素如高桿燈、月光等造成誤差。通過(guò)適當(dāng)調(diào)節(jié)標(biāo)簽點(diǎn)的位置和坐臺(tái)的轉(zhuǎn)向來(lái)進(jìn)行規(guī)避。對(duì)六氟化硫泄漏情況及位置判斷中,增設(shè)可檢測(cè)遠(yuǎn)距離的六氟化硫檢漏儀等加以調(diào)試。
3.5 核心硬件
系統(tǒng)所用硬件核心,包括舵機(jī)機(jī)器人的硬件組裝、PID控制算法的分析、控制程序的編寫(xiě)、運(yùn)動(dòng)過(guò)程的分析等過(guò)程。其中算法設(shè)計(jì)中,就循跡部分讀取灰度傳感器數(shù)值、前進(jìn)后退算法、循跡算法及其編碼器等核心硬件,來(lái)達(dá)到視覺(jué)控制效果。
3.6 設(shè)計(jì)路徑選擇
視覺(jué)導(dǎo)航設(shè)計(jì)軌線類(lèi)型的選擇,設(shè)計(jì)機(jī)器人預(yù)先行走路線、保證設(shè)備可以按照線路軌跡持續(xù)運(yùn)動(dòng)。為機(jī)器人運(yùn)作營(yíng)設(shè)較為良好的路面環(huán)境,并不受其他控制。
視覺(jué)處理設(shè)計(jì)上,視頻采集系統(tǒng)與技術(shù)的合理使用,視覺(jué)導(dǎo)航系統(tǒng)設(shè)計(jì)在車(chē)體前部,并與當(dāng)?shù)貙?shí)際狀況與設(shè)計(jì)特點(diǎn)、要求等控制位置相吻合。系統(tǒng)設(shè)計(jì)構(gòu)件選擇與各種模塊綜合組建和處理相互匹配,在各個(gè)模塊上對(duì)視覺(jué)導(dǎo)航系統(tǒng)設(shè)計(jì)功能、目標(biāo)力、協(xié)調(diào)控制力、預(yù)設(shè)工作效果水平中發(fā)揮了明顯的處理優(yōu)勢(shì)。
圖像處理層面,設(shè)計(jì)出的機(jī)器人包括載物臺(tái)底部所設(shè)行走機(jī)構(gòu)、重量感應(yīng)機(jī)構(gòu)、貨物固定機(jī)構(gòu)、支撐臺(tái)(內(nèi)部容納腔、腔內(nèi)固定安裝控制器和主處理器),支撐臺(tái)兩側(cè)對(duì)稱(chēng)抓取機(jī)構(gòu)并與之鉸接,支撐臺(tái)頂端設(shè)有支撐桿,支撐桿頂端設(shè)有圖像采集機(jī)構(gòu),底端通過(guò)帶座軸承并與支撐臺(tái)活動(dòng)連接;/n圖像采集機(jī)構(gòu)包括CCD相機(jī)(3),CCD相機(jī)、支撐桿的頂端固定連接,支撐桿(4)上固定連接第一從動(dòng)齒輪,頂端靠近支撐桿位置設(shè)有第一驅(qū)動(dòng)電機(jī),第一驅(qū)動(dòng)電機(jī)輸出軸固定連接第一主動(dòng)齒輪,第一主動(dòng)齒輪……
4 ?設(shè)計(jì)可行性報(bào)告
計(jì)算機(jī)視覺(jué)它本身的也是一個(gè)很基礎(chǔ)的學(xué)科,可以跟各個(gè)學(xué)科做交叉,同時(shí)內(nèi)部還細(xì)化到機(jī)器視覺(jué)、圖像處理、人工智能、大數(shù)據(jù)、云計(jì)算和物聯(lián)網(wǎng)等內(nèi)容。多智時(shí)代專(zhuān)注于人工智能和大數(shù)據(jù)的入門(mén)和科譜基于虛擬定標(biāo)線的巡檢機(jī)器人視覺(jué)導(dǎo)航設(shè)計(jì),在系統(tǒng)運(yùn)行期間,要處理好巡檢環(huán)節(jié)的圖像問(wèn)題,必須熟悉設(shè)計(jì)算法,并應(yīng)用matlab軟件、仿真圖像算法案例。深入學(xué)習(xí)C++等開(kāi)發(fā)程序和基于類(lèi)開(kāi)發(fā)、虛函數(shù),類(lèi)的繼承、多態(tài)、命名空間、文件的輸入輸出、模板STL等。使用opencv這個(gè)開(kāi)源庫(kù)對(duì)圖像進(jìn)行處理,實(shí)現(xiàn)了算法和代碼結(jié)合,將MFC和opencv結(jié)合,更能設(shè)計(jì)出符合導(dǎo)航現(xiàn)實(shí)設(shè)計(jì)需求的智能巡檢機(jī)器人。
5 ?結(jié)束語(yǔ)
在智能巡檢機(jī)器人視覺(jué)導(dǎo)航系統(tǒng)設(shè)計(jì)實(shí)踐中,引入虛擬定標(biāo)線作為設(shè)計(jì)主線的巡檢實(shí)踐中,通過(guò)設(shè)計(jì)方法優(yōu)選、系統(tǒng)化結(jié)構(gòu)設(shè)計(jì)內(nèi)核及其相關(guān)設(shè)計(jì)優(yōu)勢(shì)發(fā)揮,直接程度上對(duì)滿(mǎn)足巡檢工作技術(shù)要求呢、優(yōu)化工作機(jī)制具有極大的可行性。
參考文獻(xiàn):
[1]左錦,倪金鑫,陳章寶.視覺(jué)導(dǎo)航草坪修剪機(jī)器人控制系統(tǒng)設(shè)計(jì)[J].工業(yè)控制計(jì)算機(jī),2020,33(2):81-82.
[2]李佺振,王強(qiáng),曾勇,等.基于人臉識(shí)別與光流追蹤的移動(dòng)機(jī)器人視覺(jué)導(dǎo)航方法[J].自動(dòng)化與儀表,2020,35(1):23-27,65.
[3]周錫恩,吳鎮(zhèn)江,盧偲帆,等.基于視覺(jué)檢測(cè)與自主導(dǎo)航的輪式機(jī)器人平臺(tái)[J].信息技術(shù),2019(10):55-58.
[4]成怡,佟曉宇,朱偉康.改進(jìn)ORB的輪式機(jī)器人視覺(jué)導(dǎo)航算法[J].天津工業(yè)大學(xué)學(xué)報(bào),2019,38(5):58-63.
[5]龐磊,曹志強(qiáng),喻俊志.基于視覺(jué)的行人引領(lǐng)移動(dòng)機(jī)器人導(dǎo)航方法研究[J].導(dǎo)航定位與授時(shí),2019,6(4):26-32.
作者簡(jiǎn)介:張初宏(1980-),男,福建人,機(jī)電一體化工程師,本科,研究方向?yàn)闄C(jī)電一體化。
猜你喜歡
河北畫(huà)報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
- 內(nèi)燃機(jī)與配件的其它文章
- 《AutoCAD課程》混合式教學(xué)改革研究
- 提高機(jī)動(dòng)車(chē)駕駛員培訓(xùn)質(zhì)量的思考與建議
- 中職電氣自動(dòng)化教學(xué)中一體化教學(xué)模式的應(yīng)用探討
- 機(jī)械制造與自動(dòng)化專(zhuān)業(yè)建設(shè)標(biāo)準(zhǔn)開(kāi)發(fā)與實(shí)踐
- 移動(dòng)學(xué)習(xí)環(huán)境下車(chē)輛工程專(zhuān)業(yè)實(shí)踐教學(xué)改革
- 基于MOOC理念《先進(jìn)制造技術(shù)》課程教學(xué)改革模式探討