基于鄰接矩陣的行星齒輪系同構(gòu)判定方法
2020-09-10 07:22:44陳天鵬郭雨竹
內(nèi)燃機(jī)與配件 2020年12期
陳天鵬 郭雨竹
摘要:行星輪系(PGTS)的同構(gòu)判定是一個(gè)復(fù)雜的問(wèn)題,為此,提出一種基于鄰接矩陣的方法來(lái)判定行星輪系是否同構(gòu)。首先提出一種新的方法來(lái)描述行星輪系的拓?fù)鋱D,該新型拓?fù)鋱D可準(zhǔn)確描述不同構(gòu)件間相互鄰接的關(guān)系。并在傳統(tǒng)鄰接矩陣的基礎(chǔ)上進(jìn)行改進(jìn)后提出一種新的非對(duì)稱(chēng)鄰接矩陣來(lái)描述行星輪系的拓?fù)鋱D,該新型鄰接矩陣可準(zhǔn)確描述每個(gè)構(gòu)件的類(lèi)型,以及與其他構(gòu)件間的鄰接關(guān)系與鄰接方式。再通過(guò)計(jì)算鄰接矩陣的特征值與特征向量來(lái)判別行星輪系是否同構(gòu)。經(jīng)過(guò)實(shí)例驗(yàn)證,相較于之前的判定方法此方法具有高效性、可靠性。
Abstract: Isomorphism Identification Of Planetary Gear Trains(PGTS) is a difficult problem to solve. To solve it,now propose a method to identify whether the planetary gear trains are isomorphic or not.Firstly, promote a new way to describe the diagram of planetary gear trains ,the new toplogical graph can describle the way of how different parts are joined concretely. And we create an asymmetrical adjacency matrix to describle the toplogical graph based on the traditional adjacency matrix,the new adjacency matrix can describle the kind of the parts and how they are joined concretely.After calculating and comparing the eigenvalue and the eigenvector of the djacency matrix, we can identify whether they are isomorphic or not.Through enough tests,it turns out that this method is highly reliable,also can be efficient.
關(guān)鍵詞:行星輪系;同構(gòu)判定;鄰接矩陣;特征值;特征向量
Key words: Planetary Gear Train;Isomorphism Identification;adjacency matrix;eigenvalue of a matrix;eigenvector of a matrix
0 ?引言
行星輪系是指具有一個(gè)自由度的周轉(zhuǎn)輪系。行星齒輪傳動(dòng)相比于普通齒輪傳動(dòng)具有質(zhì)量輕、體積小、承載能力高、傳遞功率大等優(yōu)點(diǎn),因此常被用于制造行星齒輪增速器、減速器、差速器和換向機(jī)構(gòu)。因此,為了創(chuàng)造新的齒輪傳動(dòng)系統(tǒng),對(duì)行星輪系進(jìn)行同構(gòu)判定具有重要意義。
國(guó)內(nèi)外學(xué)者在行星輪系這一領(lǐng)域進(jìn)行了許多卓有成效的研究。1970年,F(xiàn)reudenstein等[1]首先將圖論用于定義輪系,但是當(dāng)輪系齒輪過(guò)多,拓?fù)鋱D過(guò)于復(fù)雜時(shí),不易使用。1987年,Tsai[2]用特征多項(xiàng)式來(lái)判定周轉(zhuǎn)輪系的同構(gòu),通過(guò)這種方法得到許多新的周轉(zhuǎn)輪系機(jī)構(gòu)。RAO等[3]提出了基于漢明串和基于遺傳算法的同構(gòu)識(shí)別方法。Yang Ping和V. R. Pathapati等[4,5]通過(guò)對(duì)相關(guān)機(jī)構(gòu)運(yùn)動(dòng)鏈分析,研究了齒輪運(yùn)動(dòng)鏈的同構(gòu)判定問(wèn)題。
本文首先參考劉江南[6]對(duì)復(fù)鉸的表示方法,提出了一種新的拓?fù)鋱D來(lái)描述行星輪系,在得到行星輪系的拓?fù)鋱D后,利用一種新的鄰接矩陣來(lái)描述行星輪系拓?fù)鋱D,由該鄰接矩陣可知構(gòu)件的類(lèi)型及構(gòu)件間的配合關(guān)系。最后通過(guò)鄰接矩陣的特征值與特征向量來(lái)判定行星輪系是否同構(gòu),且該方法經(jīng)過(guò)驗(yàn)證具有高效性與可靠性。
1 ?拓?fù)鋱D的表示
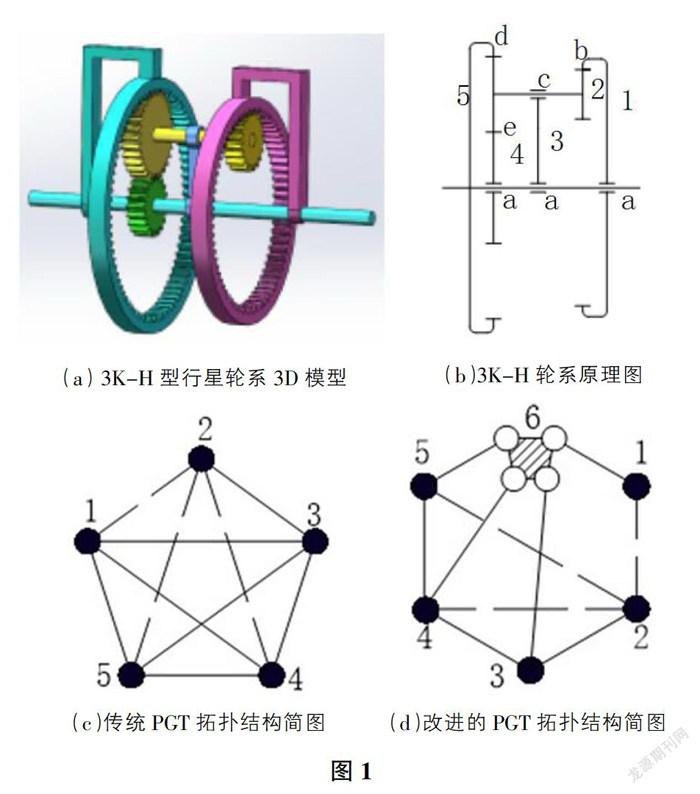
圖1(a)為一種行星輪系傳動(dòng)系統(tǒng)的3D模型,這是一種5桿1自由度的PGT,通過(guò)對(duì)3D模型轉(zhuǎn)動(dòng)副和齒輪副以及各構(gòu)件進(jìn)行標(biāo)號(hào)可得到如圖1(b)所示的原理圖,利用各構(gòu)件間的鄰接關(guān)系將齒輪副用虛線(xiàn)表示,轉(zhuǎn)動(dòng)副用實(shí)線(xiàn)表示經(jīng)轉(zhuǎn)化可得到傳統(tǒng)的PGT拓?fù)鋱D1(c),為了更好地表示不同構(gòu)件通過(guò)相同運(yùn)動(dòng)副(如圖1(b)中的運(yùn)動(dòng)副a)相鄰接的關(guān)系,現(xiàn)將這種鄰接關(guān)系用一個(gè)多邊形表示,多邊形的邊數(shù)等于通過(guò)相同運(yùn)動(dòng)副連接的構(gòu)件數(shù),并將這個(gè)多邊形用一個(gè)新的構(gòu)件PIN構(gòu)件表示。不同的構(gòu)件與PIN構(gòu)件相連是指這些構(gòu)件在多處以相同的運(yùn)動(dòng)副互相連接。如圖1(d)所示的構(gòu)件1、3、4、5分別與四邊形的PIN構(gòu)件6號(hào)構(gòu)件相連接,每個(gè)構(gòu)件再通過(guò)PIN構(gòu)件與其他構(gòu)件相鄰接(如構(gòu)件1與PIN構(gòu)件相鄰接,再通過(guò)PIN構(gòu)件與構(gòu)件3、4、5相鄰接)最后得到的拓?fù)鋱D與實(shí)物圖具有一一對(duì)應(yīng)的關(guān)系。
2 ?鄰接矩陣的描述
為了更好的描述鄰接矩陣,我們給先出定義1。
定義1:構(gòu)件的度數(shù)。構(gòu)件的度數(shù)用di來(lái)表示,其中i表示的是構(gòu)件號(hào)。構(gòu)件的度數(shù)是指一個(gè)構(gòu)件與其它構(gòu)件相鄰接時(shí)所需要的運(yùn)動(dòng)副數(shù),在拓?fù)鋱D中表現(xiàn)為一個(gè)點(diǎn)(多邊形)所連接的線(xiàn)(實(shí)線(xiàn)、虛線(xiàn))數(shù)之和。如圖1的1(c)中1號(hào)構(gòu)件的副數(shù)為4,則記d1=4。
本文在基于上述PIN構(gòu)件的轉(zhuǎn)化方法并改進(jìn)構(gòu)件間鄰接描述方法后,提出一種新的鄰接矩陣描述方法,該新方法可以更好地描述各構(gòu)件間的鄰接關(guān)系。對(duì)于含m基礎(chǔ)個(gè)構(gòu)件和n個(gè)PIN構(gòu)件的行星齒輪系,用m+n階非對(duì)稱(chēng)方陣進(jìn)行描述。各行(列)表示不同的構(gòu)件(PIN構(gòu)件也包括在內(nèi)),每個(gè)構(gòu)件的類(lèi)型由0、1、2來(lái)描述,0表示該構(gòu)件為齒輪構(gòu)件,1表示該構(gòu)件為桿類(lèi)型構(gòu)件,2表示該構(gòu)件為PIN構(gòu)件;每個(gè)構(gòu)件與其它構(gòu)件間的鄰接關(guān)系用0、1來(lái)表示,0表示兩構(gòu)件之間不相鄰接,1表示兩構(gòu)件相鄰接;每個(gè)構(gòu)件與自身的鄰接關(guān)系由0來(lái)描述;當(dāng)構(gòu)件以低副相鄰接時(shí),用0表示,當(dāng)構(gòu)件以齒輪副外嚙合時(shí),用1表示,當(dāng)構(gòu)件以齒輪副內(nèi)嚙合時(shí),用2表示,當(dāng)兩構(gòu)件不相鄰接用3表示。現(xiàn)用一位整數(shù)與三位小數(shù)來(lái)表示兩構(gòu)件間的鄰接關(guān)系與鄰接方式,整數(shù)部分表示該構(gòu)件形狀,小數(shù)部分第一位表示該構(gòu)件度數(shù),小數(shù)部分第二位表示該構(gòu)件與其他構(gòu)件是否鄰接,小數(shù)部分第三位表示該構(gòu)件與其它構(gòu)件鄰接方式。綜上所述,則得到鄰接矩陣的的定義如下所示的定義2。
定義2:對(duì)于含m基礎(chǔ)個(gè)構(gòu)件,n個(gè)PIN構(gòu)件的拓?fù)鋱Da,其轉(zhuǎn)化后的m+n鄰接矩陣A(a)的第i行第j列元素由下式來(lái)表示。
由式(1)、(2)、(3)、(4)、(5)可求得圖1(d)對(duì)應(yīng)的拓?fù)鋱Da1所對(duì)應(yīng)的鄰接矩陣A(a1)如下所示:
式(6)為一個(gè)6階非對(duì)稱(chēng)方陣,每行(列)分別代表一個(gè)構(gòu)件,該矩陣中每行元素的整數(shù)部分相同,如第1行整數(shù)部分都為0,表示構(gòu)件1為齒輪構(gòu)件,第六行整數(shù)部分都為2,表示6號(hào)構(gòu)件為PIN構(gòu)件,第3行元素整數(shù)部分都為1,表示3號(hào)構(gòu)件為非齒輪構(gòu)件。元素a24=0.411表示構(gòu)件2為齒輪構(gòu)件,該構(gòu)件度為4,且構(gòu)件2與構(gòu)件4通過(guò)齒輪副外嚙合相鄰接;元素a35=1.303表示構(gòu)件3為非齒輪構(gòu)件,該構(gòu)件度為3,且構(gòu)件3與構(gòu)件5不相鄰接。
3 ?行星輪系同構(gòu)的判定
3.1 行星輪系同構(gòu)判定的方法
基于以上特點(diǎn)可以得到如下理論:
對(duì)于兩行星輪系之間的同構(gòu)有以下必要條件:兩行星輪系的總構(gòu)件數(shù)相同,PIN構(gòu)件數(shù)相同,相對(duì)應(yīng)的分別是鄰接矩陣的階數(shù),元素大于等于2的行數(shù)相同。
兩行星輪系的運(yùn)動(dòng)副數(shù)相同,即低副數(shù)相同,齒輪副數(shù)相同,相對(duì)應(yīng)的分別是鄰接矩陣中的元素小數(shù)點(diǎn)后第三位為0元素的個(gè)數(shù)和的1/2相同,元素小數(shù)點(diǎn)后為1或2元素個(gè)數(shù)和的1/2相同。
對(duì)于兩行星輪系同構(gòu)的充要條件:兩個(gè)鄰接矩陣的特征值相同,特征向量矩陣可通過(guò)行變換轉(zhuǎn)換為同一矩陣。
3.2 行星輪系同構(gòu)的判別步驟
①寫(xiě)出兩行星輪系鄰接矩陣,判定兩鄰接矩陣的階數(shù)是否相同,如果相同,則進(jìn)行下一步判斷;如果不同,則不同構(gòu)。
②判定兩鄰接矩陣元素大于等于2的行數(shù)是否相同,如果相同,則進(jìn)入下一步判斷;如果不同,則不同構(gòu)。
③判定兩鄰接矩陣中小數(shù)點(diǎn)后第三位為1或2的元素的個(gè)數(shù)和,如果相同,則進(jìn)入下一步判斷;如果不同,則不同構(gòu)。
④計(jì)算兩鄰接矩陣的特征值與特征向量,如果特征值相同,則進(jìn)行下一步判斷;如果特征值不同,則不同構(gòu)。
⑤如果一個(gè)行星齒輪系的鄰接矩陣A(a1)的特征向量構(gòu)成矩陣V(a1)可以經(jīng)過(guò)行變換得到另一鄰接矩陣
A(a2)的特征向量構(gòu)成矩陣V(a2),則同構(gòu);如果不能,則不同構(gòu)。
⑥結(jié)束。
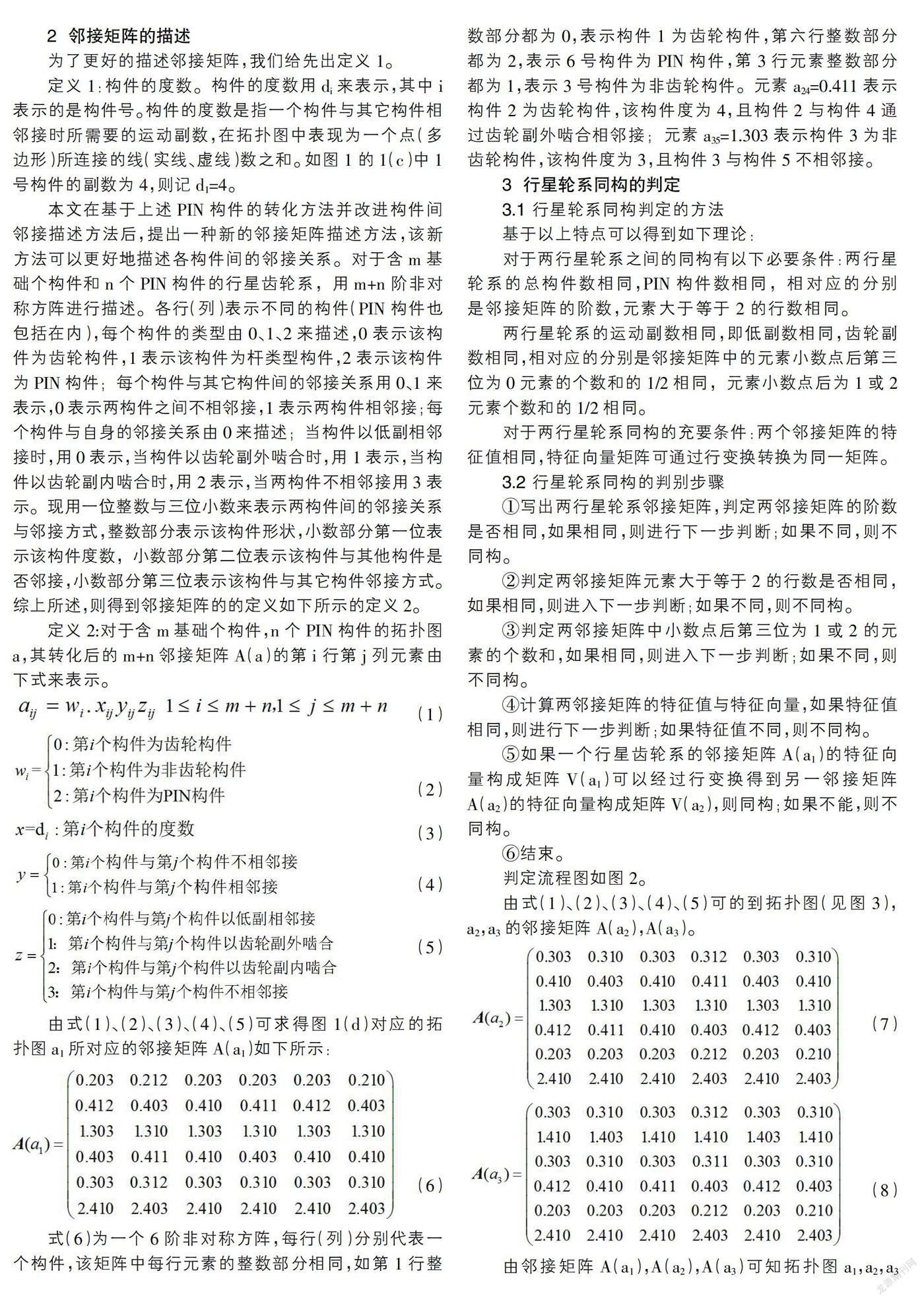
判定流程圖如圖2。
由式(1)、(2)、(3)、(4)、(5)可的到拓?fù)鋱D(見(jiàn)圖3),a2,a3的鄰接矩陣A(a2),A(a3)。
由鄰接矩陣A(a1),A(a2),A(a3)可知拓?fù)鋱Da1,a2,a3對(duì)應(yīng)的鄰接矩陣的階數(shù)都為6,元素值大于等于2的行數(shù)(即PIN構(gòu)件個(gè)數(shù))都為1,小數(shù)點(diǎn)后第三位為1或2個(gè)數(shù)和都為6(齒輪副數(shù)為3),通過(guò)同構(gòu)的必要條件無(wú)法判斷三者是否同構(gòu),需要進(jìn)行下一步計(jì)算。接下來(lái)通過(guò)鄰接矩陣可以求出對(duì)應(yīng)的特征值D(a1),D(a2),D(a3)與特征向量V(a1),V(a2),V(a3)。
由式(9)、(10)、(11)可知D(a1)=D(a2)≠D(a3),則拓?fù)鋱Da3與拓?fù)鋱Da1,a2不同構(gòu),拓?fù)鋱Da1,a2是否同構(gòu)需要進(jìn)行下一步判斷。下面來(lái)計(jì)算兩鄰接矩陣的特征向量。
兩鄰接矩陣特征向量V(a1)、V(a2),如式(12)或式(13)所示。
由式(9)、(10)可知兩鄰接矩陣A(a1),A(a2)的特征值全部相同(只是行數(shù)發(fā)生變化),由式(12)、(13)可知兩鄰接矩陣A(a1),A(a2)每個(gè)特征值所對(duì)應(yīng)的特征向量數(shù)值完全相同,數(shù)值的正負(fù)號(hào)也相同,只是相同數(shù)值所對(duì)應(yīng)元素所在的行數(shù)發(fā)生了變化。(如V(a1)、V(a2)第1列的元素完全相同, V(a1)第1行和V(a2)第5行交換,V(a1)第2行和 第4行交換……)。其中行的交換表示兩行星輪系各構(gòu)件的對(duì)應(yīng)關(guān)系,在本例中,第1行和第5行交換,第2行和第4行交換……。說(shuō)明輪系a1中的第1行1號(hào)構(gòu)件與輪系a2中的第5行5號(hào)構(gòu)件相對(duì)應(yīng),輪系a1中第2行2號(hào)構(gòu)件與輪系a2中第4行4號(hào)構(gòu)件相對(duì)應(yīng)……。兩特征向量其余未經(jīng)行變換所代表的構(gòu)件一一對(duì)應(yīng)。故兩輪系鄰接矩陣對(duì)應(yīng)特征向量可以變換為相同矩陣,則輪系a1與輪系a2同構(gòu),輪系a3與他們不同構(gòu)。
4 ?實(shí)例證明
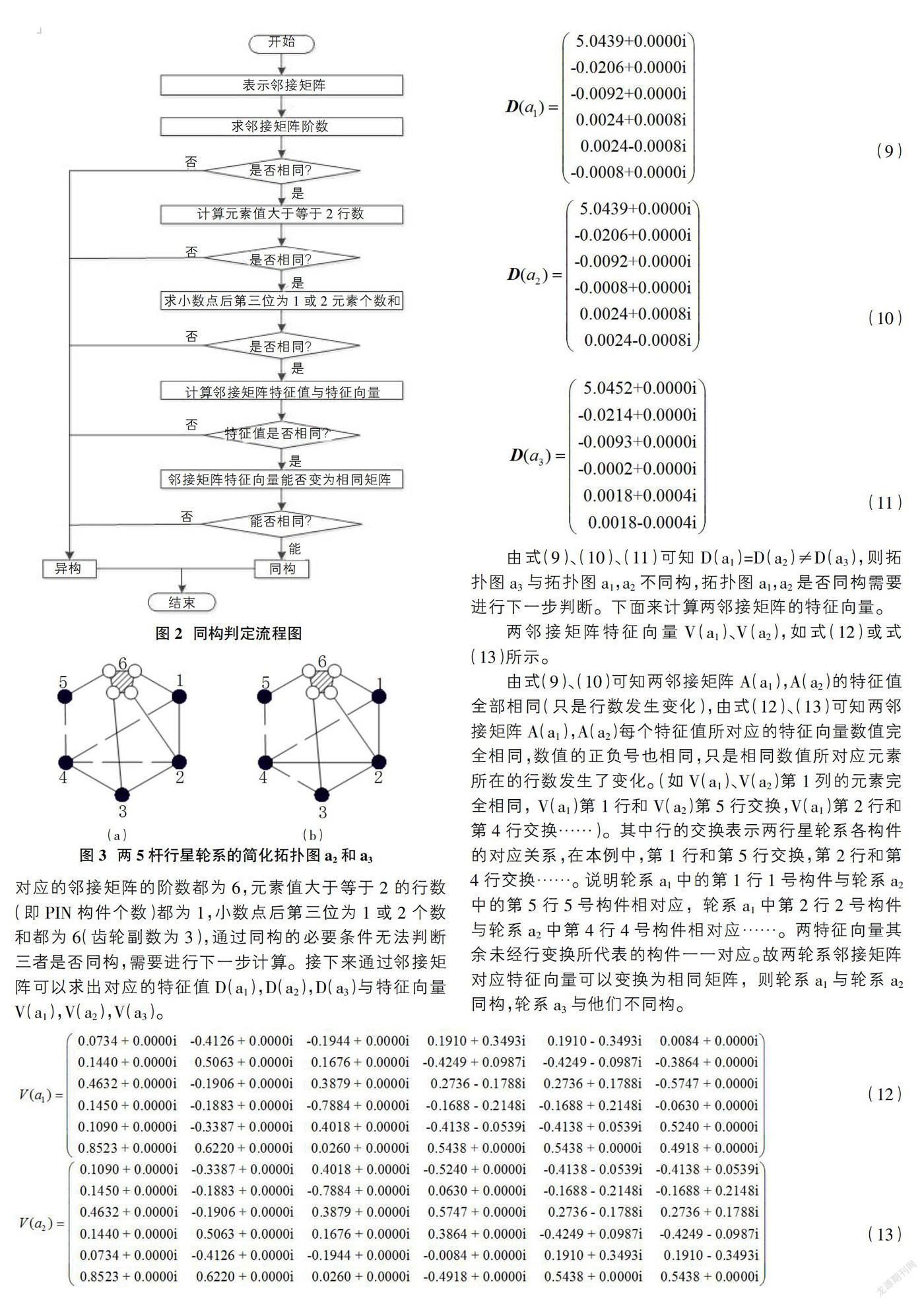
如圖4所示 a,b為兩9桿1自由度的行星輪系簡(jiǎn)化拓?fù)鋱D。可得拓?fù)鋱Da,b所對(duì)應(yīng)的鄰接矩陣A(b1),A(b2)。由式(14)、(15)可知兩鄰接矩陣的階數(shù)都為10,元素大于等于2行數(shù)(即PIN構(gòu)件個(gè)數(shù))都為1,元素小數(shù)點(diǎn)后第3位為1或2個(gè)數(shù)之和都為12(高副數(shù)為6)。為了進(jìn)一步判斷兩行星輪系是否同構(gòu),需要進(jìn)行下一步計(jì)算。
拓?fù)鋱Db1、b2對(duì)應(yīng)鄰接矩陣A(b1)、A(b2):
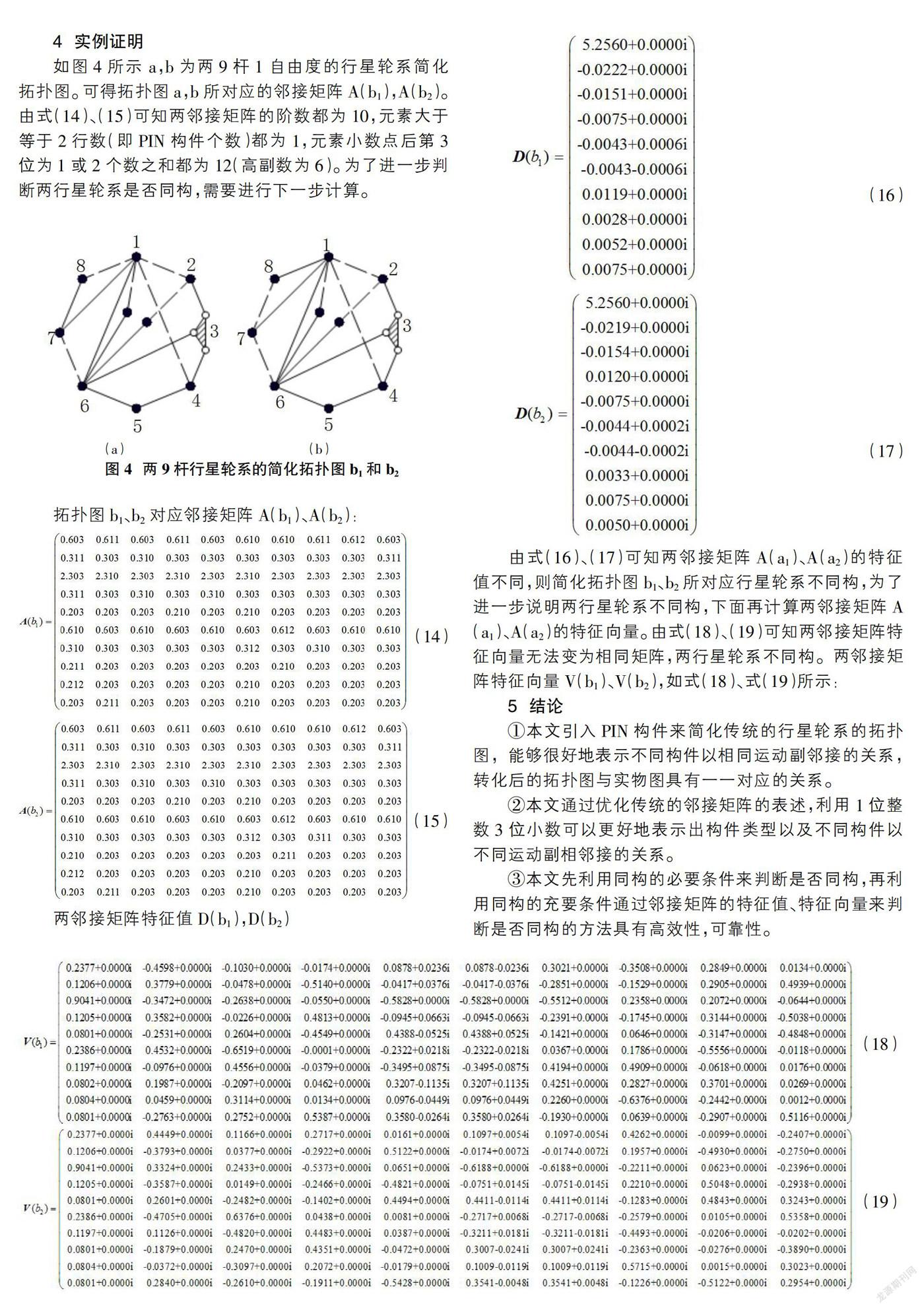
兩鄰接矩陣特征值D(b1),D(b2)
由式(16)、(17)可知兩鄰接矩陣A(a1)、A(a2)的特征值不同,則簡(jiǎn)化拓?fù)鋱Db1、b2所對(duì)應(yīng)行星輪系不同構(gòu),為了進(jìn)一步說(shuō)明兩行星輪系不同構(gòu),下面再計(jì)算兩鄰接矩陣A(a1)、A(a2)的特征向量。由式(18)、(19)可知兩鄰接矩陣特征向量無(wú)法變?yōu)橄嗤仃嚕瑑尚行禽喯挡煌瑯?gòu)。兩鄰接矩陣特征向量V(b1)、V(b2),如式(18)、式(19)所示:
5 ?結(jié)論
①本文引入PIN構(gòu)件來(lái)簡(jiǎn)化傳統(tǒng)的行星輪系的拓?fù)鋱D,能夠很好地表示不同構(gòu)件以相同運(yùn)動(dòng)副鄰接的關(guān)系,轉(zhuǎn)化后的拓?fù)鋱D與實(shí)物圖具有一一對(duì)應(yīng)的關(guān)系。
②本文通過(guò)優(yōu)化傳統(tǒng)的鄰接矩陣的表述,利用1位整數(shù)3位小數(shù)可以更好地表示出構(gòu)件類(lèi)型以及不同構(gòu)件以不同運(yùn)動(dòng)副相鄰接的關(guān)系。
③本文先利用同構(gòu)的必要條件來(lái)判斷是否同構(gòu),再利用同構(gòu)的充要條件通過(guò)鄰接矩陣的特征值、特征向量來(lái)判斷是否同構(gòu)的方法具有高效性,可靠性。
參考文獻(xiàn):
[1]Buchsbaum F, Freudenstein F. Synthesis of kinematic structure of geared kinematic chains and other mechanisms ☆[J]. Journal of Mechanisms, 1970, 5(3): 357-392.
[2]Tsai L W. An Application of the Linkage Characteristic Polynomial to the Topological Synthesis of Epicyclic Gear Trains[J]. Journal of Mechanical Design, 1987, 109(3): 329-336.
[3]Rao A C. A genetic algorithm for epicyclic gear trains[J]. Mechanism and Machine Theory: Dynamics of Machine Systems Gears and Power Trandmissions Robots and Manipulator Systems Computer-Aided Design Methods, 2003, 38(2): 135-147.
[4]Yang P, Pei Z, Liao N, et al. Isomorphism identification for epicyclic gear mechanism based on mapping property and ant algorithm[J]. Engineering with computers, 2007, 23(1): 49-54.
[5]Rao A C, Pathapati V V N R P R. A New Technique Based on Loops to Investigate Displacement Isomorphism in Planetary Gear Trains[J]. Journal of mechanical design, 2002, 124(4): 662-675.
[6]劉江南,張文博.變拓?fù)錂C(jī)構(gòu)可變運(yùn)動(dòng)副設(shè)計(jì)目錄研究[J]. 湖南大學(xué)學(xué)報(bào)(自然科學(xué)版),2017,44(10):33-40.
作者簡(jiǎn)介:陳天鵬(1999-),男,湖北武漢人,本科,學(xué)生;郭雨竹(1999-),女,湖北荊州人,本科,學(xué)生。
- 內(nèi)燃機(jī)與配件的其它文章
- 《AutoCAD課程》混合式教學(xué)改革研究
- 提高機(jī)動(dòng)車(chē)駕駛員培訓(xùn)質(zhì)量的思考與建議
- 中職電氣自動(dòng)化教學(xué)中一體化教學(xué)模式的應(yīng)用探討
- 機(jī)械制造與自動(dòng)化專(zhuān)業(yè)建設(shè)標(biāo)準(zhǔn)開(kāi)發(fā)與實(shí)踐
- 移動(dòng)學(xué)習(xí)環(huán)境下車(chē)輛工程專(zhuān)業(yè)實(shí)踐教學(xué)改革
- 基于MOOC理念《先進(jìn)制造技術(shù)》課程教學(xué)改革模式探討