電動叉車多路閥操縱機構優化設計及人機工程仿真
2020-09-10 21:23:47位猛
內燃機與配件 2020年17期
關鍵詞:舒適性
位猛
摘要:本文研究的是單桿操縱三閥,單桿操縱使得駕駛室空間充裕,操作方便。在驗證多路閥操縱機構設計合理性時首先依據叉車駕駛員操縱相關機構的動作特征,然后對優化設計的多路閥機構進行人機工程仿真分析,不斷改善叉車駕駛人員操作舒適性并根據仿真結果分析對多路閥操縱機構進一步優化的一種研究。
關鍵詞:電動叉車;操縱機構優化設計;舒適性;人機工程仿真
0? 引言
叉車多路閥是由兩個或兩個以上片式換向閥為主體組成的組合體,同時結合叉車的使用特點[1,2,4],而開發的一種專用液壓閥。因為叉車駕駛室空間局限性,一個多路換向閥要實現所有該叉車所需的功能。所以叉車使用的多路閥設計成兩個或兩個以上片式換向閥為主體的組合結構,以實現叉車功能的多樣性。
1? 單桿操縱多路閥機構設計
本章節設計一種單桿操縱機構,該方案采用一個撥片在不同的位置撥動不同的多路閥閥芯,從而控制多路閥的換向,在滑動桿的兩端利用凸臺進行定位,同時在兩端加裝復位彈簧,從而使撥片可以正常狀態下處于中間閥片上,實現自動復位的功能。
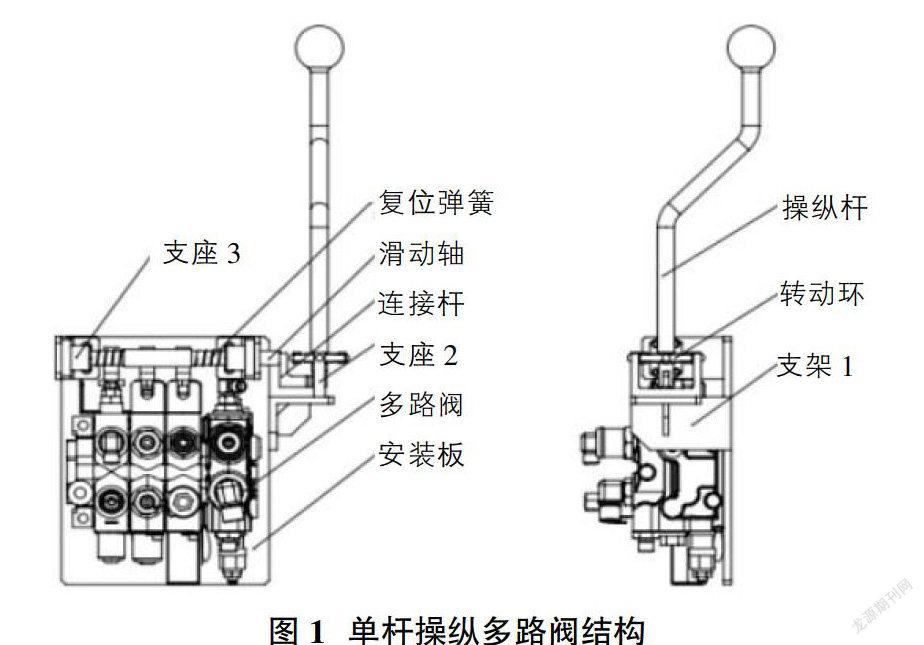
①該種單個操縱手柄操縱多個多路閥閥芯的機構主要組成有操縱桿、轉動環、支架1、復位彈簧、滑動軸、連接桿、支座2、多路閥、安裝板、支座3、閥芯卡槽與撥塊,具體視圖如圖1。
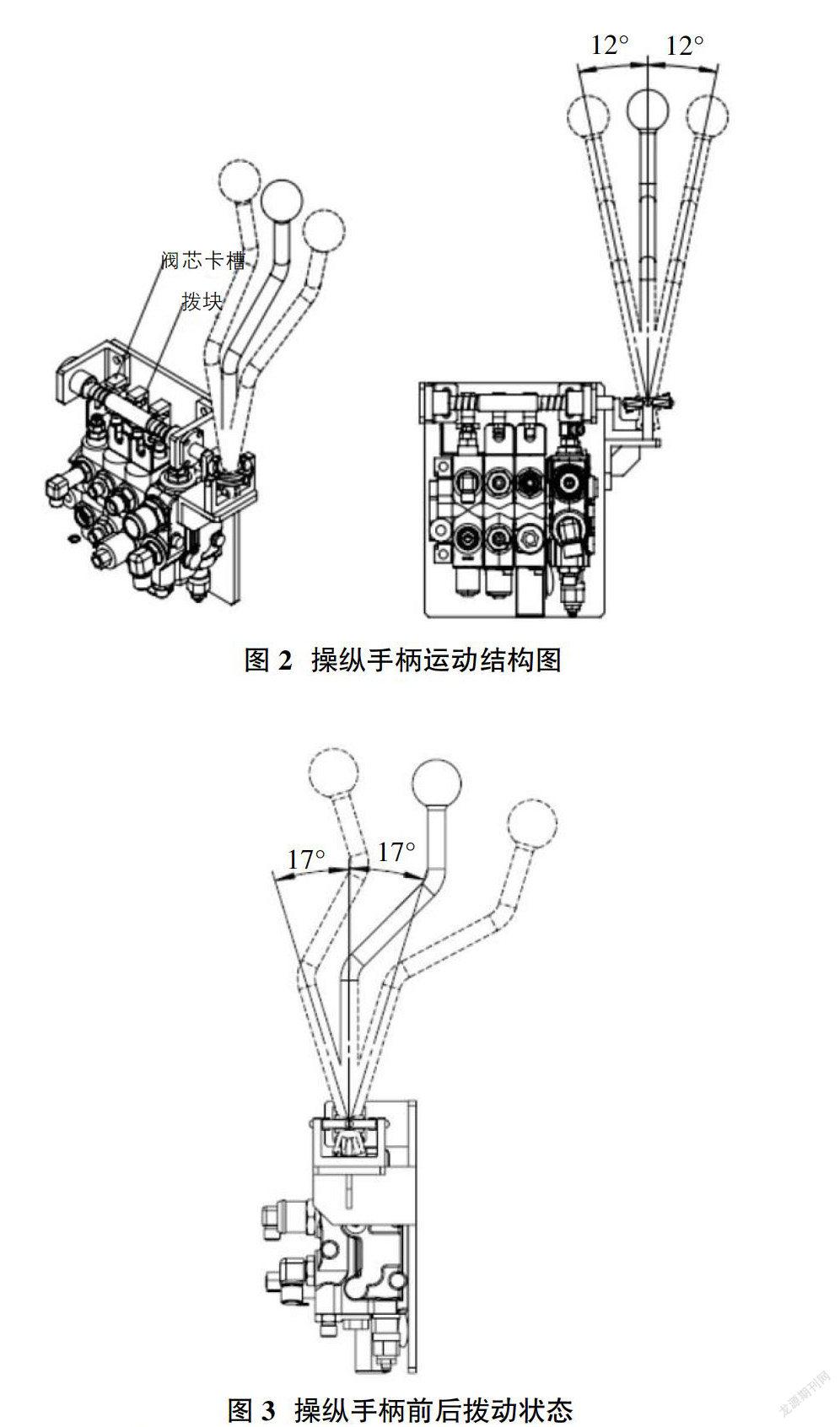
②該單桿多路閥操縱手柄通過旋轉環來實現操作角度,由多路閥的構造規定多路閥的閥芯間隔為38mm,由結構的工作原理在軟件Solidworks中作出撥塊移動距離而得出操縱手柄的擺動角度為12°,如圖2。
③多路閥閥芯由于結構原理,閥芯向上或者向下移動的距離為7.2mm,所以通過軟件Solidworks可以得出由于閥芯垂直運動距離為7.2mm而得出撥塊的偏轉角度與操縱手柄的偏轉角度為17°,如圖3。
2? 單桿操縱多路閥操縱機構仿真
在進行駕駛員操作多路閥單桿操縱機構人機工程仿真時,其中駕駛員坐姿舒適性仿真利用Delmia軟件[5]中人體姿態分析(HPA)中姿態評估與優化功能,駕駛員操縱姿態舒適性分析運用了Delmia軟件中RULA功能[3]。
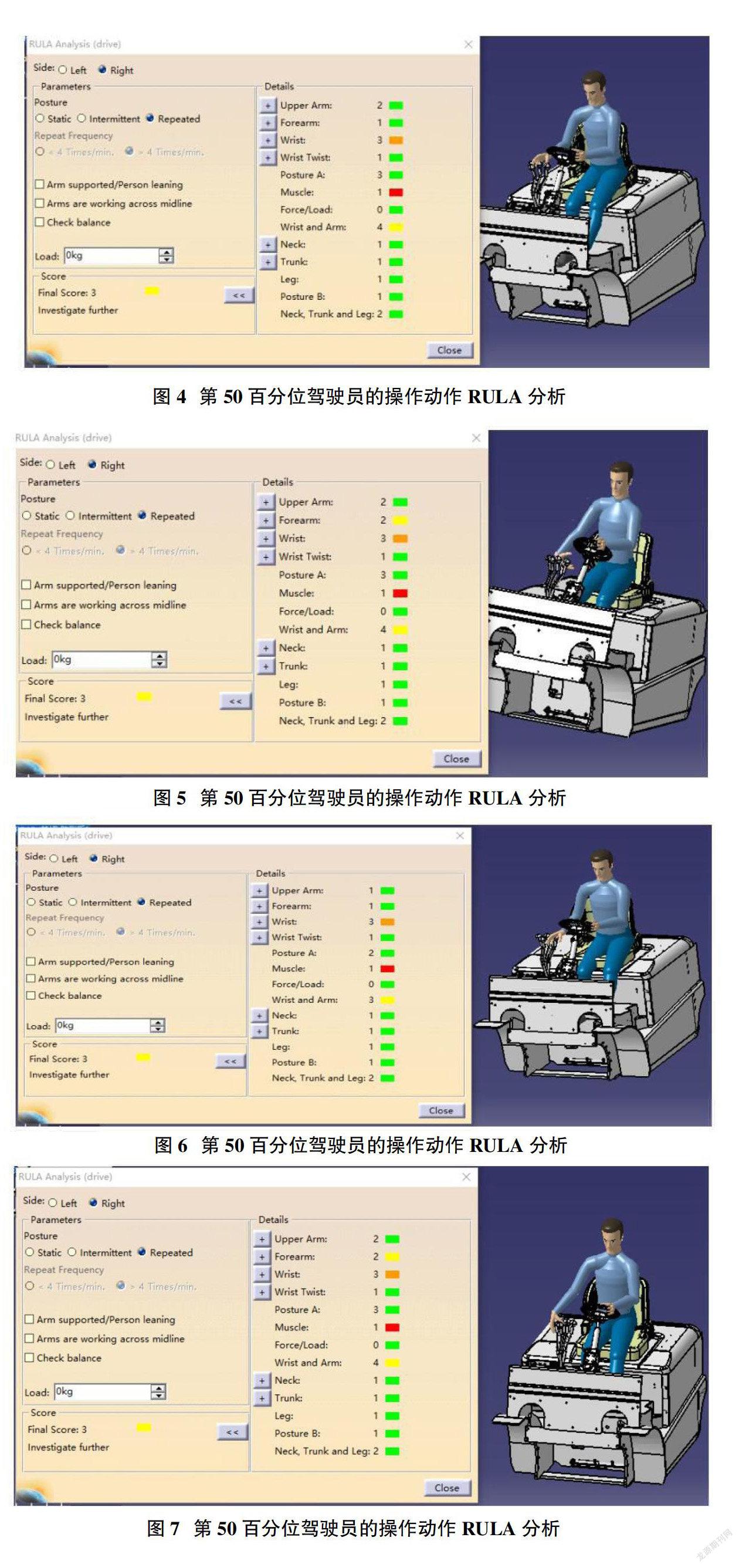
①分析駕駛員操縱單桿操縱手柄前傾時姿態。
如圖4結果表明駕駛員在操縱手柄時上臂(Upper Arm)得分為2分與前臂(Forearm)得分為1分,主要部位都處于舒適狀態下,則說明駕駛員操縱該設計優化的多路閥操縱機構前傾時是舒適的。
②分析駕駛員操縱單桿操縱手柄后傾時姿態。
如圖5結果表明駕駛員在操縱手柄時上臂(Upper Arm)得分為2分與前臂(Forearm)得分為2分,主要部位都處于舒適狀態下,則說明駕駛員操縱本文設計優化的多路閥操縱機構前傾時是舒適的。
③分析駕駛員操縱單桿操縱手柄向靠近身體一側運動時姿態。
如圖6結果表明駕駛員在操縱手柄時上臂(Upper Arm)得分為1分與前臂(Forearm)得分為1分,然而其他主要部位都處于舒適狀態下,則說明駕駛員操縱本文設計優化的多路閥操縱機構前傾時是舒適的。
④分析駕駛員操縱單桿操縱手柄向遠離身體一側時姿態。
如圖7結果表明駕駛員在操縱手柄時上臂(Upper Arm)得分為2分與前臂(Forearm)得分為2分,然而其他主要部位都處于舒適狀態下,則說明駕駛員操縱本文設計優化的多路閥操縱機構前傾時是舒適的。
3? 結論
綜上所述,叉車駕駛員在操縱單桿手柄時,上肢舒適度較高,駕駛員駕駛姿態舒適性也比較舒適,操作動作RULA姿態舒適分析也在合理范圍內,因此該多路閥操縱機構優化設計是符合人機工程學要求。
參考文獻:
[1]Clustering-based Sales Forecasting in a Forklift Distributor[J].International Journal of Engineering Research and Development,2019,11(1).
[2]于彥鳳,王帥.基于人因工程學的工程車輛駕駛室舒適性研究[J].大眾標準化,2019(13):33,35.
[3]彭衛平,胡向陽,雷金,陳磊.基于RULA的數控機床控制面板操作舒適性分析[J].人類工效學,2017,23(06):42-46,56.
[4]王瑞,章文譽,姚甲,馬慶豐,吳信麗,葛立銀,楊鷗.具有單連桿操縱機構的叉車多路閥[P].CN206051466U,2017-03-29.
[5]陳世鐘,宋健,黃卓,竇正偉,管貽生.DELMIA在機器人生產線仿真中的應用[J].機械制造與自動化,2016,45(04):157-160.
猜你喜歡
福建輕紡(2022年4期)2022-06-01 06:26:06
載人航天(2021年5期)2021-11-20 06:04:36
毛紡科技(2021年8期)2021-10-14 06:51:26
現代儀器與醫療(2021年2期)2021-07-21 02:19:12
紡織科技進展(2021年3期)2021-06-09 08:07:18
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
工業設計(2016年11期)2016-04-16 02:48:02
消費者報道(2016年3期)2016-02-28 19:07:32
汽車實用技術(2015年8期)2015-12-26 09:01:02