基于SLAM的柏油馬路智能清掃機器人
2020-09-10 09:54:06王勇祺呂茵董宇宋曉霖李巖松
內燃機與配件 2020年5期
王勇祺 呂茵 董宇 宋曉霖 李巖松
摘要:路面養護機械化程度的高低,是一個城市現代程度和綜合實力強弱的重要標志之一。針對國內的環衛清潔現狀, 本團隊研究出一種柏油馬路智能清掃機器人,主要解決道路的清潔問題以及如何能擺脫人力的局限性,通過ROS機器人操作系統視覺SLAM和雷達SLAM技術完成機器人對道路模擬地圖的構建,從而自動完成對清掃機器人的路徑規劃問題,使機器人可以自主的規劃路徑對道路進行全方位清理。
關鍵詞:路面養護;城市環保;智能型清掃;自主規劃路徑
1? 研究背景
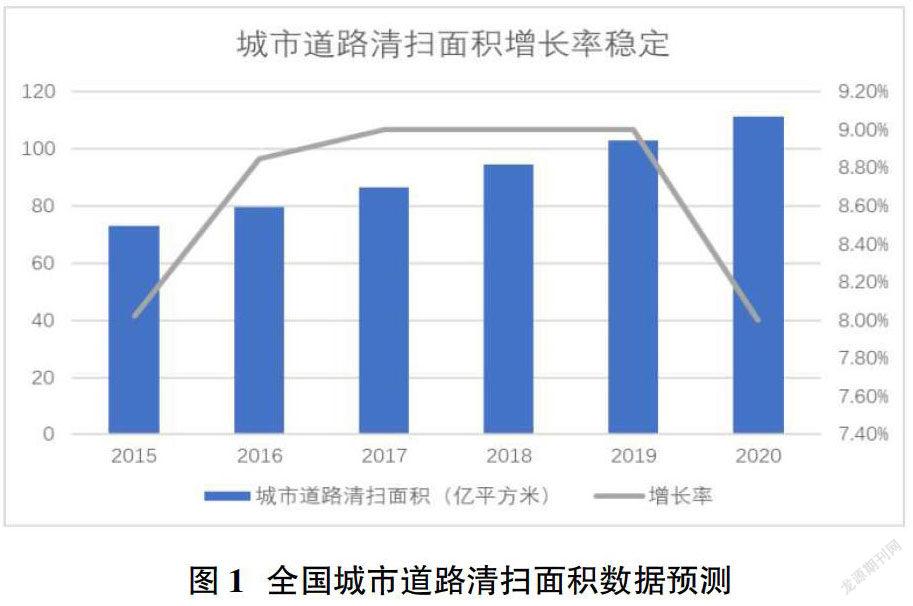
城鎮化率提升帶來道路清掃保潔面積高速增長。隨著我國近年來經濟快速發展以及國家對基礎設施建設的大力投入,我國城鎮化率穩步提升,同時人民對于保潔衛生的需求也不斷增大。全國城市道路清掃面積數據預測,城市道路清掃保潔面積從2006年的32.48億平方米增長到2018年的111.18億平方米,復合增長率約為9.42%。預計隨著城鎮化率的提升,未來五年城市清掃保潔面積增速繼續保持在5%左右,道路清掃刻不容緩。
2? 設計原理
2.1 設計思路
本產品主要目的是設計一款針對道路清掃的機器人,對道路進行高效清掃,達到維護路面整潔的功能。該機器人可以自主清掃路面,不需要人工的干預,通過獲取道路、車輛位置和障礙物信息,可以應對多種突發情況并進行有效避障。通過使用STM32單片機作為中心控制系統,利用串口通信進行數據間的傳遞。利用ROS機器人操作系統雷達SLAM和視覺SLAM感知完成對道路虛擬三維地圖的構建,并將構建的虛擬地圖顯示在系統終端,然后經過數據處理將圖像顯示在PC上位機中,該機器人可以進行智能型清掃,自主規劃路線進行清掃,當清掃完成后自主回到停放區域。
2.2 研究方法
2.2.1 STM32控制系統
本產品的設計一款針對城市柏油馬路的智能清掃機器人。利用STM32單片機作為控制中心,結合清掃系統,運動系統,三維場景模擬系統對城市路面情況復雜的柏油馬路,進行高效清掃,高效節能,維護城市道路的整潔。同時利用車載傳感器來感知車輛周圍環境通過感知所獲得的道路、車輛位置和障礙物信息,控制車輛的轉向和速度,從而使安全、可靠地道路上行駛。
2.2.2 電路設計
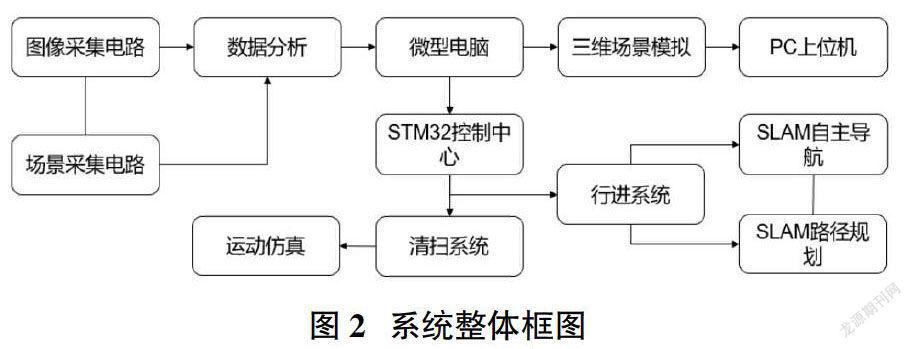
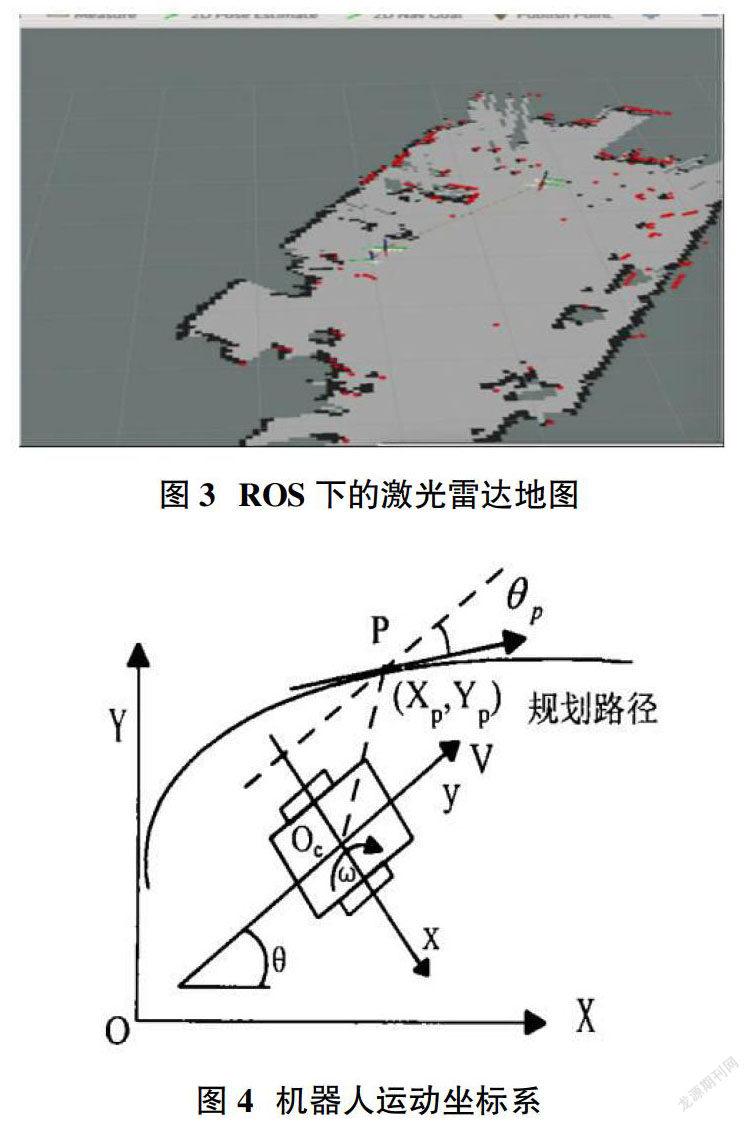
Ros機器人操作系統(圖3、圖4)。
通過ROS機器人操作系統視覺SLAM和雷達SLAM技術完成機器人對道路地模擬地圖的構建,從而自動完成清掃機器人的路徑規劃問題,通過算法分析進行路徑規范,精準避障,自主導航等功能,使機器人可以自動地規劃路徑,實現路徑導航,順利變道、精準轉彎,從而對道路進行全方位清理。
2.2.3 整體結構概述
整體結構設計(圖5、圖6)。
該產品結構主要由多過濾式螺旋離心吸塵系統、一體式單電機多傳動系統、單自由度鏈條清掃器、多級式泵水系統、萬向蝸輪蝸桿傳動機構、后部螺旋垃圾收集器、多通道高壓噴霧系統、行進輪傳動結構、底部單滾刷活動式吸塵器等構成。該產品創新結構主要針對與道路這類特殊材質地形的清掃,極大地提高了清掃效率及清掃效果。
3? 創新特色
①智能取代人工,省時省力。利用ROS機器人操作系統的路徑規劃和模擬地圖構建技術,取代傳統費時費力的人工清掃,實現了智能型機器人的功能,也極大地方便了人們的生活以及工作效率。
②功能創新,運動清掃一體化,自主導航。利用機器視覺的圖像處理及三維場地恢復技術結合雷達SLAM技術,實現了機器人對整個的道路場景的分析,規劃出最優的路線對道路進行清掃。
4? 應用前景(結語)
隨著城市道路的不斷擴展,城市化規模不斷擴大,人流車流的增大,道路垃圾越來越多、出現的頻率越來越快。道路運營過程中,道路垃圾不僅影響道路的路容路貌,不利于環保,且增加了養護職工的工作難度,更給道路安全通行埋下了重大隱患。本團隊研究出的道路清掃機器人作業方便,清掃效率高,除塵效果好并且作為環衛設備之一,可廣泛利用于干線公路,市政以及機場道面等道路清掃,未來前景良好。
參考文獻:
[1]胡正偉.清掃機器人定位及路徑規劃研究[D].燕山大學,2010.
[2]凌雙明.基于atmega128清掃機器人的控制系統設計與研究[D].湖南大學,2014.
[3]陳永芳,陳輝堂,蔣平.移動機器入全局最優規劃的研究[D].同濟大學學報,1999(27):15-18.