混聯(lián)式混合動(dòng)力挖掘機(jī)液壓系統(tǒng)的分析建模與參數(shù)匹配
2020-09-10 07:22:44周唯靚
新教育論壇 2020年14期


摘要:混合動(dòng)力液壓系統(tǒng)是以某型液壓挖掘機(jī)原動(dòng)力-液壓系統(tǒng)為基礎(chǔ),設(shè)計(jì)了一套液壓-油-電三混合動(dòng)力的多系統(tǒng)相結(jié)合的方案。該混聯(lián)式混合動(dòng)力方案的設(shè)計(jì)需適應(yīng)挖掘機(jī)負(fù)載變化劇烈及啟停頻繁的工況,即在挖掘機(jī)的動(dòng)臂上升、動(dòng)臂下降、回轉(zhuǎn)啟動(dòng)、回轉(zhuǎn)制動(dòng)以及復(fù)合動(dòng)作等工況下,選擇不同的能量傳遞和能量回收或能量釋放的能量流路線,使液壓系統(tǒng)與動(dòng)力系統(tǒng)進(jìn)行更好的匹配,既能達(dá)到節(jié)能減排提高燃油效率的目的,又不影響挖掘機(jī)的操作性和安全性要求。
關(guān)鍵詞:混合動(dòng)力;混聯(lián);數(shù)學(xué)建模
一、混合動(dòng)力系統(tǒng)關(guān)鍵技術(shù)
由于工程機(jī)械的作業(yè)工況負(fù)載沖擊大而且具有強(qiáng)突變的特點(diǎn),同時(shí)車(chē)輛的工作模式、集成控制系統(tǒng)軟件與能量回收模式等方面存在較大的差異,所以在工程機(jī)械領(lǐng)域運(yùn)用混合動(dòng)力系統(tǒng)有三個(gè)關(guān)鍵的技術(shù):混合動(dòng)力模式的選取及動(dòng)力參數(shù)優(yōu)化匹配、控制策略、能量回收系統(tǒng)及存儲(chǔ)設(shè)備[1]。
工程機(jī)械的液壓傳動(dòng)通過(guò)使用液壓馬達(dá)和液壓油缸對(duì)回收油量進(jìn)行能量回收,最后存儲(chǔ)到儲(chǔ)能元件中去。在選取儲(chǔ)能元件時(shí)要根據(jù)機(jī)器自身機(jī)構(gòu)、工作特點(diǎn)和它的動(dòng)態(tài)性能,使其滿足系統(tǒng)功率與能量的分配需要。儲(chǔ)能元件一方面儲(chǔ)存能量,另一方面向電動(dòng)機(jī)提供能量。常用的儲(chǔ)能元件的能量回收方法按照儲(chǔ)存能量的形式可以分成機(jī)械式、液壓式、電氣式三大類,其對(duì)比情況詳見(jiàn)表2-1
二、混聯(lián)式混合動(dòng)力挖掘機(jī)液壓系統(tǒng)設(shè)計(jì)
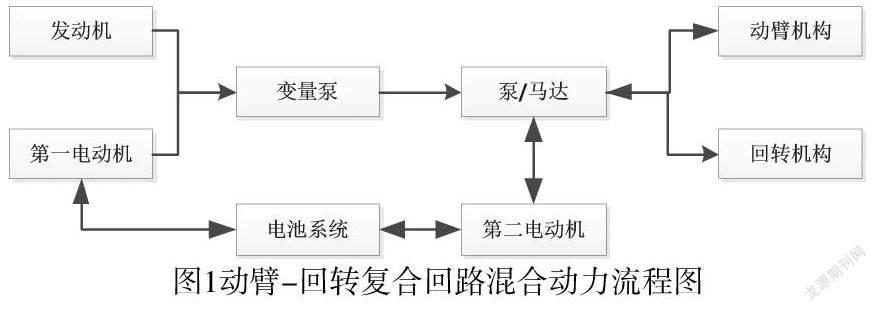
結(jié)合液壓挖掘機(jī)的動(dòng)力結(jié)構(gòu)以及執(zhí)行結(jié)構(gòu)的特點(diǎn),設(shè)計(jì)如圖1所示的動(dòng)力傳動(dòng)流程圖,從圖中可以看出“發(fā)動(dòng)機(jī)=第一電動(dòng)機(jī)=變量泵”構(gòu)成并聯(lián)系統(tǒng),“發(fā)動(dòng)機(jī)==第一電動(dòng)機(jī)==變量泵+第二電動(dòng)機(jī)==泵/馬達(dá)”構(gòu)成串聯(lián)動(dòng)力系統(tǒng)。結(jié)合某型的動(dòng)臂-回轉(zhuǎn)復(fù)合回路,根據(jù)此動(dòng)力流程的設(shè)計(jì)目標(biāo),進(jìn)行基于液壓泵/馬達(dá)的混聯(lián)式液壓挖掘機(jī)液壓系統(tǒng)的設(shè)計(jì)。
圖1動(dòng)臂-回轉(zhuǎn)復(fù)合回路混合動(dòng)力流程圖
如圖2所示是本文設(shè)計(jì)的液壓挖掘機(jī)混聯(lián)式能量回收系統(tǒng)原理圖,包括:動(dòng)臂油缸和回轉(zhuǎn)機(jī)構(gòu),發(fā)電機(jī)、電動(dòng)機(jī)、變量泵、蓄電池系統(tǒng)、電磁換向閥、液控單向閥、液控?fù)Q向閥、減速器、離合器、液壓泵/馬達(dá)、各種電磁感應(yīng)元件等。其中,電池/電量?jī)?chǔ)存單元和變頻器的使用,保證電能的回收存儲(chǔ)和釋放利用。混聯(lián)式混合動(dòng)力系統(tǒng),優(yōu)化了動(dòng)力系統(tǒng)的資源配置,利用變量泵和液壓泵/馬達(dá)的綜合作用,對(duì)動(dòng)臂動(dòng)作的勢(shì)能進(jìn)行回收和分配,增加了系統(tǒng)工作的可靠性和工作效率,發(fā)動(dòng)機(jī)轉(zhuǎn)速能保持在其燃油經(jīng)濟(jì)最佳工況,與此同時(shí)動(dòng)臂和回轉(zhuǎn)兩執(zhí)行機(jī)構(gòu)的復(fù)合動(dòng)作的運(yùn)動(dòng)協(xié)調(diào)性也得到了改善,實(shí)現(xiàn)了能量的靈活利用。
圖2混聯(lián)式混合動(dòng)力系統(tǒng)結(jié)構(gòu)
所設(shè)計(jì)的液壓挖掘機(jī)混聯(lián)式混合動(dòng)力系統(tǒng)有如下特點(diǎn):
1.采用混聯(lián)式工作回路
發(fā)動(dòng)機(jī)和電動(dòng)機(jī)分別與變量泵系統(tǒng)(原型挖掘機(jī)的雙泵系統(tǒng))同軸連接,變量泵系統(tǒng)和電動(dòng)機(jī)不僅作為挖掘機(jī)動(dòng)作的主動(dòng)力元件和電力元件,還作為在回收能量過(guò)程中發(fā)電環(huán)節(jié)的動(dòng)力來(lái)源,屬于并聯(lián)工作;第二電動(dòng)機(jī)直接為變量泵系統(tǒng)提供動(dòng)力,完成回收能量釋放的環(huán)節(jié),屬于串聯(lián)工作;在系統(tǒng)工作過(guò)程中,并聯(lián)和串聯(lián)回路共同完成液壓系統(tǒng)能量回收和能量釋放以及復(fù)合動(dòng)作的要求,該混聯(lián)式系統(tǒng)使能量利用效率得到了提高,達(dá)到了節(jié)能的目的。
2.能量回收階段
采用泵/馬達(dá)對(duì)動(dòng)臂的勢(shì)能回收[2],以及對(duì)回轉(zhuǎn)機(jī)構(gòu)的制動(dòng)能回收,利用變量泵系統(tǒng)完成對(duì)兩個(gè)執(zhí)行機(jī)構(gòu)的能量釋放,動(dòng)臂執(zhí)行機(jī)構(gòu)和回轉(zhuǎn)執(zhí)行機(jī)構(gòu)的能量回收采用了同一個(gè)能量存儲(chǔ)方式,即共用同一個(gè)能量回收和釋放的系統(tǒng)回路,這樣可以減少流量和能量的在更多元件的常規(guī)消耗損失,使回收能量的利用率得到了提高。回轉(zhuǎn)制動(dòng)的能量和動(dòng)臂下降的勢(shì)能經(jīng)過(guò)同一液壓回路進(jìn)行能量的轉(zhuǎn)換和流動(dòng),減少了液壓元件數(shù)量,節(jié)約了系統(tǒng)成本,避免了系統(tǒng)體積過(guò)于龐大;電池系統(tǒng)不僅吸收?qǐng)?zhí)行機(jī)構(gòu)的能量,也吸收在變量泵系統(tǒng)工作時(shí)因功率匹配不完全等因素多出的能量。
3.能量釋放階段
通過(guò)電動(dòng)機(jī)和變量泵系統(tǒng)完成能量釋放,采用蓄電池系統(tǒng)作為能量釋放源,可以為挖掘機(jī)工作提供大而平穩(wěn)的驅(qū)動(dòng)電流,滿足了挖掘機(jī)各個(gè)工況的功能要求和穩(wěn)定的工作要求,并且通過(guò)實(shí)時(shí)監(jiān)測(cè)電動(dòng)機(jī)的轉(zhuǎn)速和變量泵的出口壓力,判斷能量釋放是否結(jié)束,即蓄電池系統(tǒng)是否繼續(xù)放電。
4.流量再生階段
回轉(zhuǎn)制動(dòng)的流量可以經(jīng)過(guò)液壓回路的泵/馬達(dá)元件的變壓后直接提供動(dòng)臂機(jī)構(gòu)的上升工況;反之動(dòng)臂下降的勢(shì)能也可以為回轉(zhuǎn)動(dòng)作直接提供能量,多余的能量積蓄存儲(chǔ)在電池系統(tǒng)中,這種液壓流量的再生循環(huán)利用,即一次回收和二次回收,避免了油箱供油的升壓能量浪費(fèi),實(shí)現(xiàn)了液壓回路的流量的靈活性和多樣性流動(dòng),達(dá)到節(jié)能減排的目的。
5.復(fù)合動(dòng)作
動(dòng)臂機(jī)構(gòu)和回轉(zhuǎn)機(jī)構(gòu)可以單獨(dú)工作,也可以同時(shí)動(dòng)作,兩大執(zhí)行機(jī)構(gòu)均可以進(jìn)行能量的回收和能量的釋放;當(dāng)復(fù)合動(dòng)作時(shí)其中一個(gè)執(zhí)行機(jī)構(gòu)處于能量可以回收利用的狀態(tài)時(shí),可以達(dá)成流量和能量的互相利用,多余的能量存入回收系統(tǒng)的電池系統(tǒng)中,復(fù)合動(dòng)作的回路節(jié)省了能量從回收到轉(zhuǎn)換釋放的的操作流程,對(duì)能量進(jìn)行了充分的利用。
三、系統(tǒng)工況分析及數(shù)學(xué)建模
1.動(dòng)臂上升過(guò)程
主電動(dòng)機(jī)帶動(dòng)變量泵系統(tǒng)工作,油箱提供流量,動(dòng)臂主換向閥右位工作,變量泵系統(tǒng)的流量經(jīng)主換向閥至變量泵,高壓油液最終進(jìn)入動(dòng)臂油缸的無(wú)桿腔,在壓差作用下帶動(dòng)動(dòng)臂上升;動(dòng)臂油缸的有桿腔體積縮小,流出有桿腔的油液通過(guò)節(jié)流閥到達(dá)主換向閥的第三油口,最終流量通過(guò)主換向閥的第一油口回入油箱;當(dāng)油液壓力過(guò)大時(shí),溢流閥被打開(kāi),多余壓力油液經(jīng)溢流閥卸至油箱以起到保護(hù)回路的作用。
當(dāng)動(dòng)臂上升時(shí),動(dòng)臂控制閥聯(lián)工作在右位,動(dòng)臂控制閥聯(lián)亦工作在右位;回轉(zhuǎn)優(yōu)先閥的工作位置則取決于回轉(zhuǎn)機(jī)構(gòu)是否工作:若無(wú)回轉(zhuǎn)操作,則其節(jié)流口不起作用。兩個(gè)液壓泵合流后共同給動(dòng)臂缸的活塞腔供油,此時(shí)動(dòng)臂缸活塞運(yùn)動(dòng)方程為:
(1-1)
式中式中p2,p1分別為動(dòng)臂缸活塞腔和有桿腔的壓力;A1,A2為動(dòng)臂活塞有桿腔和無(wú)桿腔的有效作用面積;m為動(dòng)臂和負(fù)載的總質(zhì)量;G’為動(dòng)臂和負(fù)載的等效重量;ps為液壓泵的輸出壓力;Cq1,Cq2為動(dòng)臂主控閥1,2的閥口工藝參數(shù);A1(x),A2(x)為主控閥的節(jié)流閥口面積d2x/dt2,dx/dt為動(dòng)臂活塞的加速度和速度。
2.動(dòng)臂下降過(guò)程
主電動(dòng)機(jī)帶動(dòng)變量泵系統(tǒng)工作,動(dòng)臂機(jī)構(gòu)的主換向閥在先導(dǎo)信號(hào)下?lián)Q左位工作,通過(guò)變量泵系統(tǒng)的流量經(jīng)主換向閥的第二油口流向第三油口,動(dòng)臂油缸的有桿腔得到流量下降,當(dāng)下降速度數(shù)據(jù)不穩(wěn)定時(shí),節(jié)流閥在控制信號(hào)控制下調(diào)節(jié)開(kāi)合度,使節(jié)流閥輸出流量的速度趨于定值,從而調(diào)節(jié)動(dòng)臂下降速度的平穩(wěn)性,使液壓系統(tǒng)流量傳動(dòng)保持穩(wěn)定;動(dòng)臂油缸無(wú)桿腔里的壓力流量經(jīng)其主換向閥經(jīng)液壓泵/馬達(dá),將勢(shì)能經(jīng)處于發(fā)電模式的第二電動(dòng)機(jī),存儲(chǔ)在電池系統(tǒng)中,完成勢(shì)能的能量回收。
當(dāng)需要?jiǎng)颖巯陆档臅r(shí)候:由于動(dòng)臂下降所承受的負(fù)載相對(duì)是較小的,所以只需要一個(gè)液壓泵供應(yīng)流量即可。當(dāng)動(dòng)臂下降時(shí)動(dòng)臂主控閥工作在左位,該油路切斷;動(dòng)臂主控閥換向,動(dòng)臂缸有桿腔由液壓前泵單獨(dú)供應(yīng)流量。且主控閥的左位回油油路帶有節(jié)流小孔,可產(chǎn)生回油背壓以防止動(dòng)臂下降過(guò)快。動(dòng)臂下降過(guò)程中的運(yùn)動(dòng)方程可由式(1-2)表示。
(1-2)
式中A為動(dòng)臂主控閥1中節(jié)流小孔的節(jié)流面積,Cq為其流量系數(shù)。
3.回轉(zhuǎn)動(dòng)作過(guò)程:
液壓回轉(zhuǎn)系統(tǒng)工作時(shí)其系統(tǒng)液壓能將主要由后泵提供,且回轉(zhuǎn)方向由回轉(zhuǎn)主控閥的左位和右位確定。挖掘機(jī)回轉(zhuǎn)動(dòng)作的穩(wěn)定閥組通過(guò)各自的工作特性以求使回轉(zhuǎn)過(guò)程盡可能的平穩(wěn)。制動(dòng)閥的工作狀態(tài)由操作人員控制,常態(tài)下制動(dòng)閥由于其自身的彈簧力作用使其處于下位,即在不需要挖掘機(jī)回轉(zhuǎn)時(shí)制動(dòng)器始終處于制動(dòng)狀態(tài),只有當(dāng)回轉(zhuǎn)時(shí)才會(huì)在先導(dǎo)壓力作用下克服彈簧力使其閥芯上移到上位,制動(dòng)器被屏蔽,不起制動(dòng)作用。此時(shí)泵/馬達(dá)的物理特征方程可表述為式(1-3):
(1-3)
式中QL為回轉(zhuǎn)主控閥7流量;θm是液壓馬達(dá)轉(zhuǎn)角;Dm為液壓馬達(dá)排量;C為液壓馬達(dá)的綜合泄漏系數(shù),其可表述為Ci+0.5Ce(Ci為內(nèi)泄漏系數(shù),Ce為外泄漏系數(shù));Vt是液壓馬達(dá)容積腔與連接管道總的容積;Jt是液壓馬達(dá)總慣性矩;液壓馬達(dá)阻尼系數(shù)Bm表示的是總黏性的阻尼;G為負(fù)載等效扭轉(zhuǎn)彈簧剛度;TL為液壓馬達(dá)軸的外部力矩;xv是回轉(zhuǎn)主控閥芯位移;PL為液壓馬達(dá)內(nèi)部容積腔壓差;kq為回轉(zhuǎn)主控閥芯流量增益;kc為回轉(zhuǎn)主控閥芯小孔節(jié)流系數(shù);βe為液壓馬達(dá)有效容積彈性模量。
4.動(dòng)臂-回轉(zhuǎn)復(fù)合動(dòng)作過(guò)程:
本文設(shè)計(jì)的混聯(lián)式液壓系統(tǒng)在能量回收中有一次回收,也有二次回收。一次回收是動(dòng)臂與回轉(zhuǎn)復(fù)合動(dòng)作時(shí)流量的互相利用,二次回收是復(fù)合動(dòng)作時(shí)多余的流量轉(zhuǎn)化為電能的過(guò)程,其中二次回收不僅有動(dòng)臂勢(shì)能的轉(zhuǎn)化,也包括回轉(zhuǎn)制動(dòng)動(dòng)能的轉(zhuǎn)化。對(duì)于設(shè)計(jì)的系統(tǒng)回路,具體過(guò)程是:當(dāng)動(dòng)臂下降時(shí),動(dòng)臂下降的速度由液壓泵/馬達(dá)的排量控制,即根據(jù)第二電動(dòng)機(jī)E/M的轉(zhuǎn)速和油缸的目標(biāo)速度來(lái)決定排量。回轉(zhuǎn)速度也由第二電動(dòng)機(jī)E/M調(diào)節(jié),當(dāng)回轉(zhuǎn)加速時(shí),動(dòng)臂下降的勢(shì)能可以通過(guò)液壓泵/馬達(dá)傳遞給回轉(zhuǎn)機(jī)構(gòu),如有多余的勢(shì)能未直接利用,即動(dòng)臂下降的功率大于回轉(zhuǎn)加速動(dòng)作所需的功率的工況,則通過(guò)處于發(fā)電模式的電動(dòng)機(jī)將機(jī)械能轉(zhuǎn)化為電能儲(chǔ)存在電池系統(tǒng)中;當(dāng)回轉(zhuǎn)制動(dòng)動(dòng)作時(shí),制動(dòng)動(dòng)能和動(dòng)臂下降的勢(shì)能均經(jīng)電動(dòng)機(jī)存儲(chǔ)在電池系統(tǒng)中。
對(duì)于動(dòng)臂下降和回轉(zhuǎn)的復(fù)合動(dòng)作,根據(jù)動(dòng)力流程圖1,利用工作的點(diǎn)線性化,由于泵的壓力傳遞函數(shù)和輸出流量[3]為:
(1-4)
式(4-4)中,為泵的斜盤(pán)傾角,N表示元件功率。
其工作狀態(tài)的數(shù)學(xué)描述可以為式(1-5):
(1-5)
當(dāng)挖掘動(dòng)作完成,動(dòng)臂承載上升時(shí),回轉(zhuǎn)優(yōu)先閥將發(fā)揮作用,使液壓泵/馬達(dá)優(yōu)先得到流量供應(yīng),保證回轉(zhuǎn)的連續(xù)。由于回轉(zhuǎn)優(yōu)先閥使動(dòng)臂活塞缸活塞腔油路上產(chǎn)生一定的節(jié)流壓差,從而使進(jìn)入動(dòng)臂缸的流量減少而供應(yīng)液壓泵/馬達(dá)的流量增加。式(1-6)為動(dòng)臂上升和挖掘機(jī)回轉(zhuǎn)復(fù)合動(dòng)作時(shí)的液壓回路動(dòng)態(tài)方程。
(1-6)
式中Cq3為回轉(zhuǎn)優(yōu)先閥3節(jié)流閥口流量系數(shù),A為其節(jié)流截面通流面積;Δp為回轉(zhuǎn)優(yōu)先閥的節(jié)流壓差[4]。其他的物理參數(shù)在前面的分析中已說(shuō)明。
所設(shè)計(jì)系統(tǒng)的數(shù)學(xué)動(dòng)力學(xué)方程以及仿真所需相關(guān)參數(shù)的計(jì)算,不僅可以更加了解挖掘機(jī)的整體性能,通過(guò)建立的數(shù)學(xué)模型也為系統(tǒng)主要部件的選型及設(shè)計(jì)提供了參數(shù)基礎(chǔ),由于所設(shè)計(jì)系統(tǒng)以某型液壓挖掘機(jī)為基礎(chǔ),在此發(fā)動(dòng)機(jī)及電動(dòng)機(jī)的參數(shù)已確定,所要重新選型的是混聯(lián)式系統(tǒng)中代替回轉(zhuǎn)馬達(dá)的液壓泵/馬達(dá)以及電池系統(tǒng)中的蓄電池。
四、液壓泵/馬達(dá)的傳動(dòng)比設(shè)計(jì)
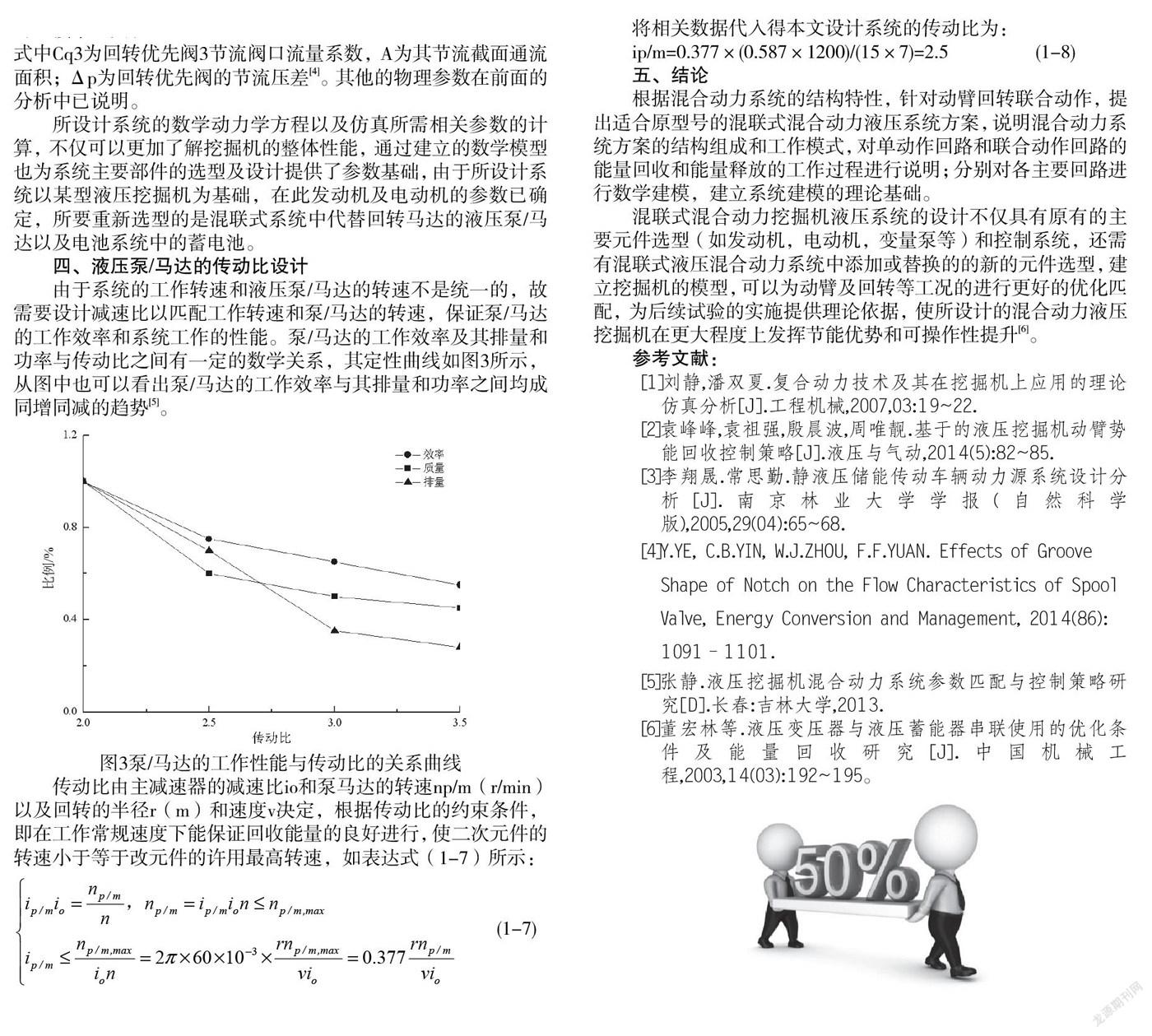
由于系統(tǒng)的工作轉(zhuǎn)速和液壓泵/馬達(dá)的轉(zhuǎn)速不是統(tǒng)一的,故需要設(shè)計(jì)減速比以匹配工作轉(zhuǎn)速和泵/馬達(dá)的轉(zhuǎn)速,保證泵/馬達(dá)的工作效率和系統(tǒng)工作的性能。泵/馬達(dá)的工作效率及其排量和功率與傳動(dòng)比之間有一定的數(shù)學(xué)關(guān)系,其定性曲線如圖3所示,從圖中也可以看出泵/馬達(dá)的工作效率與其排量和功率之間均成同增同減的趨勢(shì)[5]。
圖3泵/馬達(dá)的工作性能與傳動(dòng)比的關(guān)系曲線
傳動(dòng)比由主減速器的減速比io和泵馬達(dá)的轉(zhuǎn)速np/m(r/min)以及回轉(zhuǎn)的半徑r(m)和速度v決定,根據(jù)傳動(dòng)比的約束條件,即在工作常規(guī)速度下能保證回收能量的良好進(jìn)行,使二次元件的轉(zhuǎn)速小于等于改元件的許用最高轉(zhuǎn)速,如表達(dá)式(1-7)所示:
(1-7)
將相關(guān)數(shù)據(jù)代入得本文設(shè)計(jì)系統(tǒng)的傳動(dòng)比為:
ip/m=0.377×(0.587×1200)/(15×7)=2.5(1-8)
五、結(jié)論
根據(jù)混合動(dòng)力系統(tǒng)的結(jié)構(gòu)特性,針對(duì)動(dòng)臂回轉(zhuǎn)聯(lián)合動(dòng)作,提出適合原型號(hào)的混聯(lián)式混合動(dòng)力液壓系統(tǒng)方案,說(shuō)明混合動(dòng)力系統(tǒng)方案的結(jié)構(gòu)組成和工作模式,對(duì)單動(dòng)作回路和聯(lián)合動(dòng)作回路的能量回收和能量釋放的工作過(guò)程進(jìn)行說(shuō)明;分別對(duì)各主要回路進(jìn)行數(shù)學(xué)建模,建立系統(tǒng)建模的理論基礎(chǔ)。
混聯(lián)式混合動(dòng)力挖掘機(jī)液壓系統(tǒng)的設(shè)計(jì)不僅具有原有的主要元件選型(如發(fā)動(dòng)機(jī),電動(dòng)機(jī),變量泵等)和控制系統(tǒng),還需有混聯(lián)式液壓混合動(dòng)力系統(tǒng)中添加或替換的的新的元件選型,建立挖掘機(jī)的模型,可以為動(dòng)臂及回轉(zhuǎn)等工況的進(jìn)行更好的優(yōu)化匹配,為后續(xù)試驗(yàn)的實(shí)施提供理論依據(jù),使所設(shè)計(jì)的混合動(dòng)力液壓挖掘機(jī)在更大程度上發(fā)揮節(jié)能優(yōu)勢(shì)和可操作性提升[6]。
參考文獻(xiàn):
[1]劉靜,潘雙夏.復(fù)合動(dòng)力技術(shù)及其在挖掘機(jī)上應(yīng)用的理論仿真分析[J].工程機(jī)械,2007,03:19~22.
[2]袁峰峰,袁祖強(qiáng),殷晨波,周唯靚.基于的液壓挖掘機(jī)動(dòng)臂勢(shì)能回收控制策略[J].液壓與氣動(dòng),2014(5):82~85.
[3]李翔晟.常思勤.靜液壓儲(chǔ)能傳動(dòng)車(chē)輛動(dòng)力源系統(tǒng)設(shè)計(jì)分析[J].南京林業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2005,29(04):65~68.
[4]Y.YE, C.B.YIN, W.J.ZHOU, F.F.YUAN. Effects of Groove Shape of Notch on the Flow Characteristics of Spool Valve, Energy Conversion and Management, 2014(86): 1091–1101.
[5]張靜.液壓挖掘機(jī)混合動(dòng)力系統(tǒng)參數(shù)匹配與控制策略研究[D].長(zhǎng)春:吉林大學(xué),2013.
[6]董宏林等.液壓變壓器與液壓蓄能器串聯(lián)使用的優(yōu)化條件及能量回收研究[J].中國(guó)機(jī)械工程,2003,14(03):192~195。
