電力系統配電網故障診斷的改進最小碰集方法研究
2020-09-07 09:40:24朱進宏
通信電源技術 2020年11期
朱進宏,王 劍
(1.中國電建集團福建工程公司,福建 福州 350018;2.福州地鐵集團有限公司,福建 福州 350009)
0 引 言
隨著人工智能的不斷發展,它在配電網故障診斷領域的應用成為研究熱點,其中基于模型診斷是典型代表[1-2]。基于模型診斷擺脫了對經驗數據的依賴,在所有步驟中最小碰集計算直接決定了診斷的準確率。因此,最小碰集計算成為配電網應用中最重要的因素。傳統的最小碰集計算采用樹形搜索法[3-4]、布爾代數算法[5]以及分布式方法[6],但這些方法無法適用于問題規模較大的情形。因此,基于智能優化算法的最小碰集算法孕育而生,包括遺傳算法[7]、二進制粒子群[8]以及差分算法[9]等智能群體算法。這些算法在最小碰集計算中取得了良好的計算效果,但仍存在一定的提升空間。細菌覓食算法是模仿大腸桿菌覓食過程的仿生物算法,定位原理簡單,對初值和參數的要求較低,具有較高的魯棒性,在配電網發電控制等方面已得到了較好的應用[10-11]。將細菌覓食算法引入最小碰集計算,針對其存在的覓食效率低下的問題,提出了一種趨向改進環節。通過測試最小沖突集和分析17節點配電網得知,改進細菌覓食算法能更好地實現定位。
1 最小碰集計算模型
根據基于智能優化算法的最小碰集的計算原理,構建的目標函數[12]為:

其中,Ncx表示在最小沖突集簇中與迭代粒子x至少有一個共同元素的沖突集數量,Nc表示最小沖突集的數量,Lx表示迭代粒子的長度,ω為比例系數。
為準確識別最小碰集,需要構建一個判據來識別。式(1)對應的最小碰集判據為:

2 改進細菌覓食算法
細菌覓食算法的數學實現包括趨向環節、復制環節以及驅散環節3個環節。
2.1 趨向環節
趨向環節是指細菌在覓食過程中不斷向食物豐富的地方逼近。標準細菌覓食算法的趨向實現方法為:

其中:θi(j+1,k,l)表示第i個個體在第j+1次趨向環節,第k次復制環節和第l次驅散環節中的覓食位置;C(i)表示覓食的單位步長;Δ(i)表示隨機生成的方向向量。
趨向環節的速度較慢且沒有一定的目標性,導致覓食效率低下。為改進細菌在趨向環節的覓食效率,提出改進趨向策略。若細菌趨向過程中遇到食物減小,則加強與覓食較多細菌的聯系,并向其趨近。改進趨向策略的數學實現方法為:
其中:θi(j,k,l)表示第i個個體在第j次趨向環節,第k次復制環節和第l次驅散環節中的覓食位置;ω0為比例系數;c1自學系數;c2為社會學習系數;ξ1和ξ2為[0,1]上的隨機數;θi_tumble(j,k,l)為發生翻轉失效后的細菌覓食位置;θbest(j,k,l)為當前迭代次數下的細菌覓食最優位置。
2.2 復制環節
復制環節是指細菌經過較長時間后,覓食能力強的細菌得到大量繁殖,覓食能力差的細菌死亡,數學實現方法為:

其中,J(j,k+1,l)表示細菌在第j次趨向、第k+1次復制和第l次驅散操作中的適應度值。
2.3 趨散環節
驅散環節是指在細菌整個覓食過程遭遇一些突發狀況后會進行位置遷移,以求生存。數學實現方法為:

其中,θi(j,k,l)和θi(j,k,l+1)表示覓食位置,L(i)表示隨機生成的驅散步長。
3 最小碰集求解流程
利用改進細菌覓食算法,求解最小碰集計算模型的流程如圖1所示。
4 算例分析
4.1 性能測試
為測試改進細菌覓食算法在最小碰集計算中的性能,設置{[1,…,k],…[n…,k+n-1]}為最小沖突集,并將其與文獻[7]中遺傳算法、文獻[8]中的粒子群算法以及文獻[9]中的差分算法進行比較,計算準確率如表1所示。
從表1可以看出,所提方法在所有沖突集規模下都能找出全部的最小碰集,其他3種算法隨著沖突集規模的增加,準確率不斷下降。可見,所提最小碰集計算方法具有更好的計算性能。
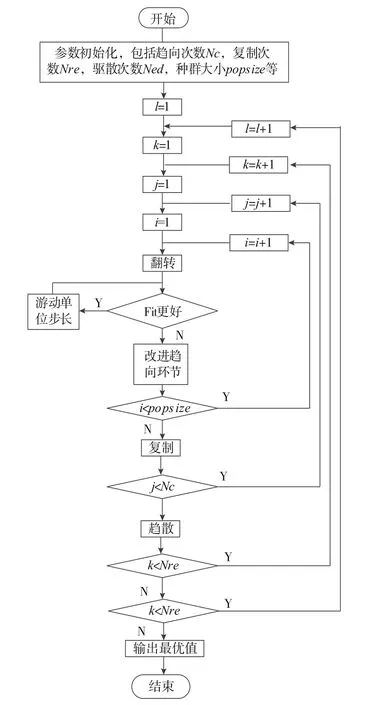
圖1 最小碰集計算步驟
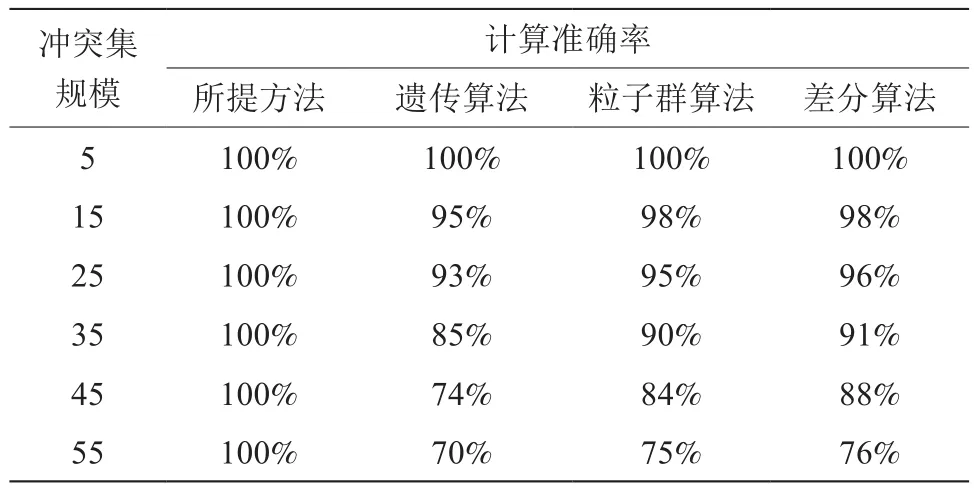
表1 計算準確率對比
4.2 在配電網中的算例分析
為測試所提最小碰集算法在配電網故障診斷中的性能,搭建17節點配電網,如圖2所示。該配電網的各類節點處安裝有測量裝置,可以采集每個節點的故障電流和電壓。
在區段3的A相和B相設置兩重故障,將測量裝置采集的故障電流和電壓帶入約束關系式,獲得每個關系式的相對殘差和絕對殘差,結果如表2所示。
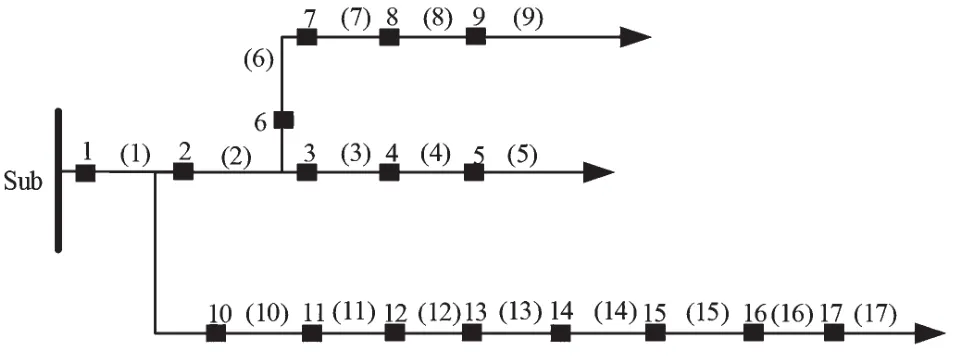
圖2 17節點配電網拓撲
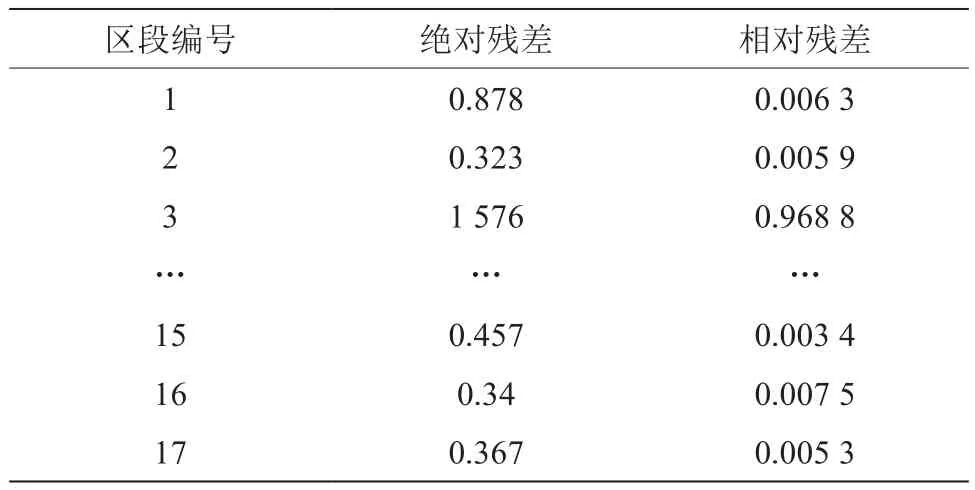
表2 約束關系式的相對殘差和絕對殘差
根據設定的相對殘差的臨界值,可以確定最小沖突集為:

利用改進的細菌覓食算法求解最小碰集,結果為:
從計算結果可以看出,真實的故障區段組合在所得到的最小碰集中,所提方法能搜索出所有的最小碰集。此外,在配電網中的不同位置設置不同類型的故障,得到最小沖突集,如表3所示。
從最小碰集計算結果看,改進細菌覓食算法能準確計算所有最小碰集,在不同故障區段和不同故障類型下,所提方法都能準確并完整地找出所有最小碰集。因此,所提最小碰集算法對配電網基于模型診斷具有較強的適應能力。
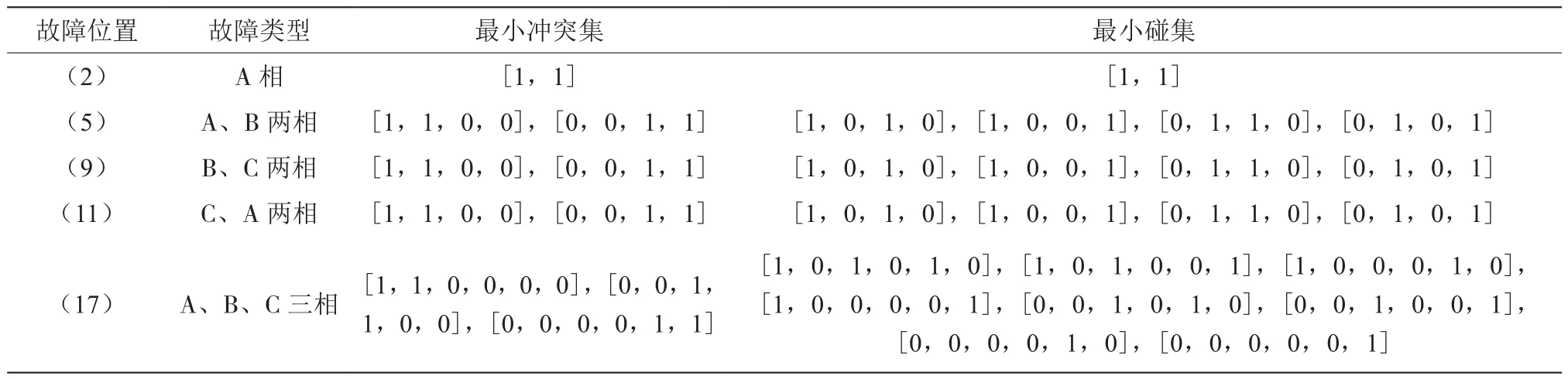
表3 最小碰集計算結果
5 結 論
最小碰集計算是基于模型診斷在配電網故障診斷中應用的關鍵,可將細菌覓食算法引入最小碰集計算。通過測試設定的最小沖突集和分析17節點配電網的算例可知,通過改進趨向環節可以提高最小碰集計算的效率,而改進細菌覓食算法在計算最小碰集中具有較高的定位效率和準確度。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
電測與儀表(2016年5期)2016-04-22 01:14:14
Coco薇(2016年2期)2016-03-22 02:42:52
河南電力(2016年5期)2016-02-06 02:11:24
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
