基于ADAMS的微型壓力機多連桿機構運動學及動力學分析
2020-09-04 05:10:10鹿新建鄒利明
鍛壓裝備與制造技術 2020年4期
張 楠,鹿新建,鄒利明
(南京工程學院 機械工程學院,江蘇 南京 211167)
在日本,十幾年前開發的伺服壓力機,目前進入了普及期。隨著其在汽車零件、電子零件等高精度、難成形加工領域中的應用,已經顯示出之前壓力機所無法比擬的優越性。伺服壓力機的開發現狀和未來發展將十分可觀[1]。微型伺服[2]壓力機近年來發展迅速,隨著5G時代的到來,該壓力機可用于5G通訊零件的小批量多規格柔性沖壓,具有十分廣闊的發展前景。多連桿機構是壓力機的主要傳動系統,在優化分析方面,目前已有針對雙曲柄伺服壓力機的桿系優化分析[3]和針對閉式四點八連桿機械壓力機的桿系設計[4]、基于桿組法進行多連桿壓力機的模塊化運動學性能分析[5]以及關于多連桿機構位置點的仿真分析[6],相應的國外也有類似研究[7],但很少有研究將壓力機多連桿機構和一般曲柄滑塊機構作對比。本文將對滑塊位移、速度、加速度及各鉸接點受力情況進行探討。
1 桿系的建立
1.1 多連桿機構
該多連桿機構如圖1所示,連桿1為曲柄,繞點P01轉動,連桿2與連桿3相連,連桿3為擺桿,連桿3可繞點P03轉動,連桿3與連桿4相連,并與滑塊5構成搖桿滑塊機構。該多連桿機構構件數目:n=5,低副PL=7,高副PH=0,則該機構自由度為:
因此當連桿1為唯一原動件時,滑塊5具有確定的運動。
1.2 曲柄滑塊機構
建立曲柄滑塊機構,與多連桿機構進行分析比較。曲柄滑塊機構如圖2所示,連桿1可繞點M01轉動,并通過連桿2使滑塊3移動。該機構自由度為:
因此該曲柄滑塊機構以連桿1為唯一原動件時,滑塊3具有確定的運動。
2 桿系的建立
在ADAMS中建立多連桿機構模型。該多連桿機構共有6個關鍵點,5個構件,并根據要求施加轉動副、移動副、驅動力和載荷。該文主要研究滑塊處的位移、速度、加速度及鉸接點的受力情況,構件的質量屬性參數不參與仿真。
擬建立50kN伺服壓力機模型,在此模型下,重力加速度為9.8m/s2,滑塊工作次數為0~150spm,在最大工作次數下,為曲柄(連桿1)施加900°/s的驅動力。滑塊公稱力行程為1.4mm,在公稱力行程內工作時間為0.37s~0.43s(由圖3所得),當滑塊處于下死點附近時,為滑塊施加50000N的力,力函數為:
即在 0.37s~0.40s和 0.77s~0.80s內施加 50000N的力,仿真時間為兩個周期(0.8s)。
在ADAMS中,利用點坐標建立機構關鍵點,關鍵點坐標單位為mm,再由關鍵點建立多連桿機構和曲柄滑塊機構模型。
多連桿機構各關鍵點坐標如表1所示。
曲柄滑塊機構關鍵點坐標值如表2所示。
對于曲柄滑塊機構,除基本結構與多連桿機構不同外,其余設計參數均相同。
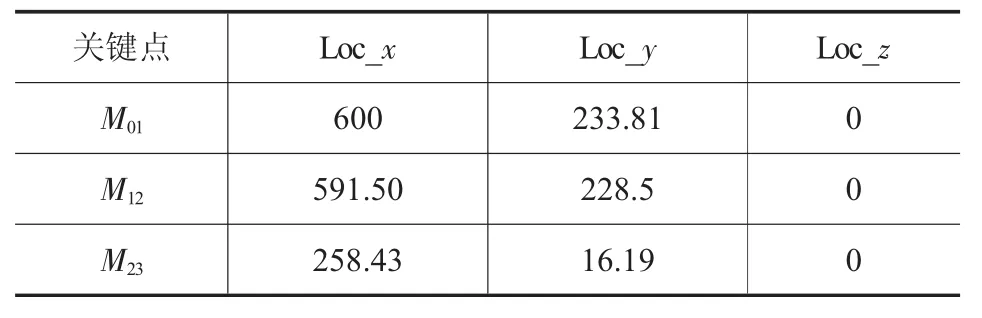
表2 曲柄滑塊機構關鍵點坐標值
3 運動學仿真
3.1 滑塊位移分析
如圖3所示,多連桿機構滑塊由下死點向上運動的過程中,位移曲線斜率大于曲柄滑塊曲線斜率,導致多連桿機構滑塊向下沖壓的時間是曲柄滑塊機構的1.03倍,即在作用力區間內(縱坐標0~1.4mm),多連桿機構滑塊位移曲線(實線)相較于曲柄滑塊機構滑塊位移曲線(虛線)作用時間更長,有利于零件的精密加工。
3.2 滑塊速度分析
如圖4所示,多連桿機構(實線)相較于曲柄滑塊機構(虛線)在滑塊進程與回程過程中速度較大,在下死點附近的速度較小,能夠延長沖壓過程中的時間,能夠減小沖壓過程中的沖擊,有利于精密成形。
多連桿機構的平均速度大于曲柄滑塊機構,說明多連桿機構具有更加顯著的急回特性,下死點附近速度較小,有利于零件精密加工。在0.2s~0.4s區間內,多連桿機構的圖形較曲柄滑塊機構整體左移,且更快地達到最大速度點,致使在0.3s~0.4s時間段內多連桿機構速度小于曲柄滑塊機構。
3.3 滑塊加速度分析
如圖5所示,在0.4s處多連桿機構滑塊加速度為3097.60mm/s,曲柄滑塊機構為4708.42mm/s,多連桿機構(實線)相較于曲柄滑塊機構(虛線)在死點附近加速度較小,且加速度變化更加平緩。滑塊更小更平緩的加速度,將使零件沖壓過程中產生更小的振動,有利于提高加工零件的精密性,提高加工質量。在離開下死點附近后,多連桿機構的加速度大于曲柄滑塊機構,此時多連桿機構的滑塊速度快速增加,減少了滑塊在空行程段運動的時間。
4 動力學分析
4.1 驅動力轉矩分析
在已知滑塊載荷為50kN的基礎上,通過仿真得出驅動力處所需要的轉矩變化曲線,如圖6所示。根據仿真圖像,機構滑塊在進入公稱力行程(1.4mm)向下運動時,由于施加載荷,驅動力處轉矩突增至最大值,之后轉矩逐漸較小,到達下死點處為零。
多連桿機構(實線)的轉矩值在極大值處是曲柄滑塊機構(虛線)的0.67倍,即此多連桿機構需要較小轉矩的電機驅動,有利于能源的節約。
4.2 鉸接點受力分析
對于多連桿機構和曲柄滑塊機構,選取驅動力處的鉸接點P01和點M01作對照,如圖7所示。選取滑塊端的鉸接點P45和點M23作對照,如圖8所示。多連桿機構(實線)相較于曲柄滑塊機構(虛線)在鉸接點處的受力明顯較小,表明此多連桿在交接點處可選用較小強度的連接件。
5 結論
建立50kN微型伺服壓力機多連桿機構模型,且該桿系參數能夠滿足工作要求,曲柄長度較短,能夠實現滑塊行程要求。通過在ADAMS中對該多連桿機構與曲柄滑塊機構的對比分析,結果表明:
(1)該多連桿機構在下死點附近工作時間更長、速度更小、加速度變化更加平穩,更有利于零件的成型加工及精密制造。
(2)在滑塊去程及回程過程中大部分時間多連桿機構的速度及加速度更大,相較于曲柄滑塊機構有利于生產效率的提高。
(3)對兩機構滑塊施加相同載荷后,兩機構驅動力處轉矩變化趨勢相同,但多連桿機構在驅動力處的轉矩值明顯小于曲柄滑塊機構在驅動力處的轉矩值,表明該多連桿機構可選用較小轉矩的伺服電機驅動。
(4)對兩機構滑塊施加相同載荷后,在主要鉸接點處多連桿機構的受力明顯小于曲柄滑塊機構,表明該多連桿機構可選用較小剛度的連接件。在實際中,因為摩擦力的引入,各鉸接點的實際受力比理想狀態下的大。
猜你喜歡
中學生數理化·中考版(2022年12期)2022-02-16 07:36:56
今日農業(2021年8期)2021-11-28 05:07:50
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
河南畜牧獸醫(2016年24期)2016-11-29 01:28:30
中國衛生(2014年2期)2014-11-12 13:00:16
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
語文知識(2014年7期)2014-02-28 22:00:26
終身教育研究(2014年5期)2014-02-28 01:23:06
